一种汽车智能控制安全系统模型装置
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及智能控制领域,具体是指一种汽车智能控制安全系统模型装置。
背景技术
近年来,我国道路交通事故频发,交通事故发生起数和严重程度居世界前列。在这种情况下,必须充分考虑交通安全。道路交通事故的成因主要指为人的因素、车辆因素、道路因素、交通因素以及气候因素等,而在所有事故中,人的因素占首位,行车过程中,需要驾驶员对不同因素进行判断做出正确决策,增加了驾驶压力,而将智能控制技术引入车载系统可以在很大程度上减少驾驶员的驾驶压力,提高行车安全性。
随着科技的飞速发展,卫星导航技术不断发展并应用于交通领域,卫星的跟踪定位系统体现了巨大的潜力,并不断被人们挖掘创新。随着5G通信时代的到来,以无线传感器网络作为辅助技术,不仅可以实现地面与车载的双向通信,并且信息传输速度已达到毫秒级,进而为车载系统提供了精准可靠的定位信息。此外大数据管理可以实时把控数据的变更,强化信息的处理能力,能很好地提高数据采集的精准度和处理效率等。
因此,汽车智能控制安全系统的设计对汽车安全性能有很大的提高,可以有效的防止交通事故随汽车普及而急剧增加。
现有技术中的事故原因包括以下几点:
1、人为因素人的过失行为是造成交通事故的主要原因,驾驶员肇事的主要原因是驾驶员安全行车意识淡薄,缺乏驾驶经验,行车安全技术较低,违章行车现象严重。各类违章行为引发的事故。
1.2道路及交通因素
2、根据道路不同车道数的安全影响系数研究可见,城市道路的事故率随车道数的增加而降低,单车道的事故率最高。此外,交叉路口由于交通量大,冲突点多及视线盲区大,所发生的交通事故也多,据统计,环形交叉路口的事故率最高,其次是三路交叉口、多路交叉口、四路交叉口。
通过以上原因分析,超速行驶、纵向间距不够、不按规定让行、措施不当、疏忽大意、违章转弯、违章会车、判断错误、违反交通标志标线、违章停车、违反交通信号等占据交通事故比例高达63.17%,其中超速行驶、不按规定让行、措施不当、疏忽大意、违章转弯、违章会车、判断错误、违反标志标线等通常是在高速状况下而发生事故,此外,交叉路口发生事故大多情况都是由于汽车行驶过快未能及时判断造成的;违章停车、违反交通信号灯等通常是由于未按规定停车而发生事故。
故我们可将事故原因大致分为三类:速度过快、间距不足、未按规定停车,而这些问题可通过汽车智能安全控制系统得到合理的解决。
基于上述问题,一种汽车智能控制安全系统模型装置成为整个社会亟待解决的技术问题。
发明内容
本发明主要适用于解决现有技术中车辆速度过快、间距不足、未按规定停车等问题。
为解决上述技术问题,本发明提供的技术方案为:一种汽车智能控制安全系统模型装置,包括汽车本体和控制电路,所述汽车本体上设置有用于控制方向的步进电机、主控制器、UWB模块、通信模块、编码器、视觉传感器、电源模块、电机模块和显示屏,所述显示屏和摄像头之间电性连接,用于显示摄像头图像,所述步进电机设置在汽车本体的前侧,所述主控制器与步进电机、通信模块、编码器、电源模块、UWB模块、电机模块之间电性连接,用于运算和逻辑处理信息,所述编码器安装在步进电机上,所述视觉传感器采用摄像头传回路况信息,所述步进电机采用驱动模块实现动力传输的实时响应,所述步进电机、UWB模块、通信模块、编码器、视觉传感器和电源模块集成设置在PCB印刷电路板上;
所述控制电路包括编码器及驱动电路、摄像头控制电路和MCU电路,所述编码器驱动电路通过对脉冲进行采集获取速度,通过正交解码编码器得到车速的数字信号,对数字信号进行线性变换,获取汽车速度信号。智能控制安全系统把人、车、路有机结合在一起,通过对车辆、路标安装安全传感装置,利用卫星导航技术对行车过程进行实时监控,采用5G通信技术技术完成双向通信,并通过大数据管理对数据实时处理,进行智能化强制改变车速,增加纵向间距等措施;因此,采用智能控制安全系能很好地降低交通事故的发生率。
进一步地,所述电源模块采用7.2V电池供电。
进一步地,所述主控制器采用恩智浦K66型号,所述主控制器通过PWM模块对汽车动力系统进行控制。
进一步地,所述摄像头采用MT90V型号。
进一步地,所述汽车本体上设置有支撑杆,所述摄像头设置在支撑杆上。
进一步地,所述通信模块为5G通信模块。
进一步地,所述UWB模块用于汽车本体的定位。
进一步地,所述电机模块用于电机的驱动。
发明与现有技术相比的优点在于:本发明制作出一种基于卫星导航系统、5G通信技术以及大数据管理技术原理设计的一套汽车智能控制安全系统模型装置,能够将人、车、路有机的结合在一起,系统地完成对车辆行车过程的实时判断分析并作出可靠地强制控制措施使汽车处于安全行驶状态,有效的降低了交通事故的发生率。
附图说明
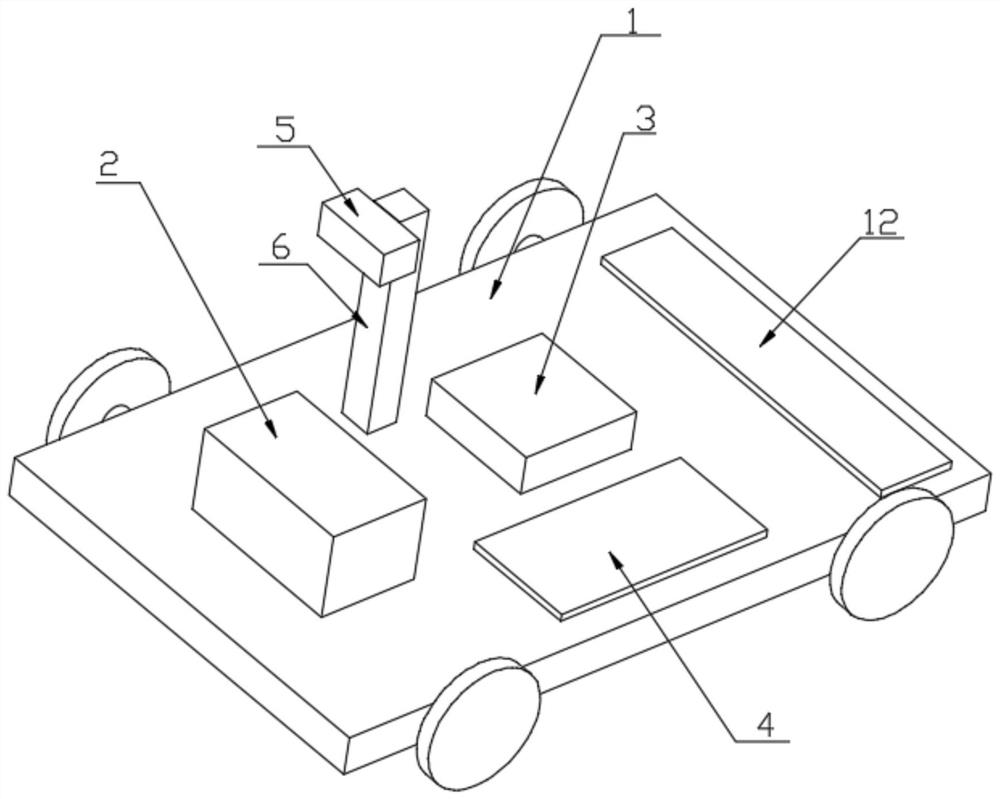
图1是本发明一种汽车智能控制安全系统模型装置的结构示意图;
图2本发明一种汽车智能控制安全系统模型装置的控制模块图;
图3是编码器及驱动电路示意图;
图4是摄像头控制电路示意图;
图5是MCU电路示意图。
如图所示:1、汽车本体,2、步进电机,3、主控制器,4、显示屏,5、摄像头,6、支撑杆,7、UWB模块,8、编码器,9、通信模块,10、视觉传感器,11、电源模块,12、电机模块。
具体实施方式
下面结合附图对本发明做进一步的详细说明。
结合附图,对本发明进行详细介绍。
本发明在具体实施时提供了一种汽车智能控制安全系统模型装置,包括汽车本体1和控制电路,所述汽车本体1上设置有用于控制方向的步进电机2、主控制器3、UWB模块7、通信模块9、编码器8、视觉传感器10、电源模块11、电机模块12、和显示屏4,所述显示屏4和摄像头5之间电性连接,用于显示摄像头图像,所述步进电机2设置在汽车本体1的前侧,所述主控制器3与步进电机2、通信模块9、编码器8、电源模块11、UWB模块7、电机模块12之间电性连接,用于运算和逻辑处理信息,所述编码器8安装在步进电机2上,所述视觉传感器10采用摄像头传回路况信息,所述步进电机2采用驱动模块实现动力传输的实时响应,所述步进电机2、UWB模块7、通信模块9、编码器8、视觉传感器10和电源模块11集成设置在PCB印刷电路板上;
所述控制电路包括编码器及驱动电路、摄像头控制电路和MCU电路,所述编码器驱动电路通过对脉冲进行采集获取速度,通过正交解码编码器得到车速的数字信号,对数字信号进行线性变换,获取汽车速度信号。
作为本发明的进一步阐述,所述电源模块11采用7.2V电池供电。
作为本发明的进一步阐述,所述主控制器3采用恩智浦K66型号,所述主控制器通过PWM模块对汽车动力系统进行控制。
作为本发明的进一步阐述,所述摄像头5采用MT90V型号。
作为本发明的进一步阐述,所述汽车本体上设置有支撑杆6,所述摄像头5设置在支撑杆6上。
作为本发明的进一步阐述,所述通信模块9为5G通信模块。
作为本发明的进一步阐述,所述UWB模块7用于汽车本体的定位。
本发明一种汽车智能控制安全系统模型装置的具体实施过程如下:本发明在使用时,汽车智能控制安全系统中硬件配置主要为恩智浦K66型号的主控制器3,并通过PWM模块对汽车动力系统进行控制。通过传感器10采集汽车速度信号、道路信息信号等,通过接口电路传递给主频为180MHz,5v供电的处理器进行处理分析。
电源模块11采用7.2V电池供电,编码器驱动电路通过对脉冲进行采集获取速度,通过正交解码编码器得到车速的数字信号,对数字信号进行线性变换,获取汽车速度信号。通过传感器采集汽车速度信号、道路信息信号等,通过接口电路传递给主频为180MHz,5v供电的处理器进行处理分析。选用MT90V型号的摄像头5传回路况图像,该摄像头5功耗较小在3.3V电压下75mA电流功耗小于250mw,以及全局快门技术,在高速运动的状态下,可以呈现更高品质的图像,高动态性能能够更加精准的捕捉图像。便于后期图像的分析与处理,同时满足在高速状态下的需求。
作为本发明的进一步阐述,关于道路信息的提取和识别及汽车方向的控制如下:。
由摄像头传回的图像,通过算法计算出道路的中线,并以中线作为行进标准,通过线性偏差,获取方向,从而进行数字化输出。采用步进电机(舵机)与PID进行方向调整控制。
比例(P)、积分(I)、微分(D)控制算法各有作用:
比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;
微分,反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。
作为本发明的进一步阐述,汽车速度控制如下:。
从速度测量模块处获得速度信号后,结合通信模块9获得的信号,采用PID控制策略对汽车进行速度控制。
作为本发明的进一步阐述,采用UWB定位技术,在场地四角搭设信号基站,全面覆盖整个场地,车辆上搭载信号标签,即可实时获取标签的位置数据,实现测距功能,其精准度为厘米级别,对应折合为一米内。
以上对本发明及其实施方式进行了描述,这种描述没有限制性,附图中所示的也只是本发明的实施方式之一,实际的结构并不局限于此。总而言之如果本领域的普通技术人员受其启示,在不脱离本发明创造宗旨的情况下,不经创造性的设计出与该技术方案相似的结构方式及实施例,均应属于本发明的保护范围。
- 一种汽车智能控制安全系统模型装置
- 一种基于TS模型的汽车半主动悬架系统的智能控制方法