一种RDK立体视检测系统及其使用方法
文献发布时间:2023-06-19 09:54:18
技术领域
本发明涉及眼科医疗器械的技术领域,更具体地,涉及一种RDK立体视检测系统及其使用方法。
背景技术
立体视是视觉器官对周围物体远近、深浅、高低三维空间位置的分辨感知能力,是建立在双眼同时视和融合功能基础上的独立的高级双眼视功能,由于两眼水平分开,物体在左右眼视网膜成像,形成微小的不对应差别,即双眼视差,并由此产生立体视觉。
立体视的获得依赖于准确协调的眼球问题及双眼的黄斑中心凹注视,立体视锐度是分辨双眼视网膜影像间最小的水平视差(零视差)的能力,单位是角秒,一个人被测得的立体视锐度越小,其立体视功能越好,目前,国内对立体视功能的检测方法包括远距离立体视检测、中距离立体视检测及近距离立体视检测,2009年8月,杨小梅,胡雪篱,郎卫华等在《中国实用眼科杂志》上公开发表“两种随机点立体视检查法在临床应用比较(27(008):875-876)”的文章,文章中比较了颜少明等研制的立体视觉检查图与金贵昌等研制的立体视觉检查图的临床应用,属于近距离立体视的定量检查手段,是相对动态的立体视,也提供了深度信息,但是检测图形设计的复杂度高以及检测处理过于机械,导致被检测者难以辨认,造成立体视检测结果的准确性低的后果。
另一方面,现有立体视的检测大多通过单一眼睛逐次检测,在评价立体视时比较片面,进一步拉低了立体视检测结果的准确性。
发明内容
为解决现有立体视检测方式中检测图形设计的复杂度高、检测处理过于机械以及单一的问题,本发明提出一种RDK立体视检测系统及其使用方法,提升立体视检测处理的灵活性,提高立体视功能检测结果的准确性。
为了达到上述技术效果,本发明的技术方案如下:
一种RDK立体视检测系统,包括:
RDK随机Gabor斑闪烁模型,用于生成视差图像信号,视差图像信号的轮廓构成人眼可识别形状;
噪声生成器,用于生成干扰视差图像信号的噪声,所述噪声生成器生成的噪声包括一级噪声、二级噪声及三级噪声;
对比度设定模块,用于设定视差图像信号的对比度及视差图像信号加噪声的对比度;
状态变换模块,用于将RDK随机Gabor斑闪烁模型生成的视差图像信号以若干种状态变换;
双眼视差分级设定模块,将双眼视差由高到低依次设定划分为若干个等级;
偏振显示器,用于显示视差图像信号及加噪声的视差图像信号;
偏振观测器,用于用户在进行立体视检测时,观测视差图像信号及加噪声的视差图像信号轮廓构成的人眼可识别形状;
统计模块,用于统计用户人眼观测分辨到的观测到视差图像信号轮廓构成人眼可识别形状的立体视凹凸状态情况;
比较判断模块,根据用户分辨的立体视凹凸状态情况,用于判断分辨的立体视凹凸状态情况对应的用户双眼视差是否符合要求;
噪声遍历判断模块,用于判断视差图像信号所加噪声的噪声级别是否已遍历一级噪声、二级噪声及三级噪声;
立体视检测输出模块,用于输出立体视的检测结果。
优选地,状态变换模块将视差图像信号以若干种状态变换的变换类型包括:随机旋转状态变换、90度旋转状态变换、相位相反状态变换、相位平移状态变换、位移状态变换及正常状态变换。
在此,视差图像信号的随机旋转状态变换、90度旋转状态变换、相位相反状态变换、相位平移状态变换、位移状态变换及正常状态变换为6种空间频率变换形式,为组成视差图像信号轮廓的相邻元素的参数变化,提高了立体视检测处理的灵活性。
优选地,RDK立体视检测系统用于用户左眼检测时,用户通过偏振观测器实现左眼观察视差图像信号,右眼观察的视差图像信号加噪声;RDK立体视检测系统用于用户右眼检测时,用户通过偏振观测器实现右眼观察视差图像信号,左眼观察的视差图像信号加噪声;所述噪声无规则均匀分布于整个信号生成区域,与视差图像信号为均匀分布,用户根据需要增加或减少噪声的数量。
在此,RDK立体视检测系统用于立体视检测时,用户的双眼均观察信号,避免了现有立体视的检测大多通过单一眼睛逐次检测,在评价立体视功能时比较片面,降低立体视检测结果准确性的缺陷。
优选地,视差图像信号通过RDK随机Gabor斑闪烁模型生成,RDK随机Gabor斑闪烁模型的模型密度和闪烁频率可变。
优选地,RDK立体视检测系统用于用户左眼检测时,生成左眼观察的视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率,与生成右眼观察的加噪声视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率相同或不同;RDK立体视检测系统用于检测左眼时,生成右眼观察的视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率,与生成左眼观察的加噪声视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率相同或不同。
在此,在左眼或右眼的同一检测中,对应生成左右眼视差图像信号的RDK随机Gabor斑闪烁模型的闪烁频率可以不同,生成左右眼视差图像信号的RDK随机Gabor斑闪烁模型互不影响,在评价立体视功能时比较全面。
本发明还提出一种RDK立体视检测系统的使用方法,包括:
S1.明确用户待检测的眼别,利用RDK随机Gabor斑闪烁模型生成视差图像信号,利用噪声生成器生成噪声,并通过偏振显示器显示;
S2.利用对比度设定模块设置视差图像信号的对比度维持100%,视差图像信号加噪声对比度维持100%;
S3.利用状态变换模块将视差图像信号以若干种状态中的一种变换状态进行变换;
S4.利用双眼视差分级设定模块设定双眼视差,利用噪声生成器生成三级噪声;
S5.使用偏振观测器观测偏振显示器指定区域的视差图像信号,分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸状态情况,利用统计模块统计用户分辨的立体视凹凸状态情况;
S6.根据用户分辨的立体视凹凸状态情况,通过比较判断模块判断双眼视差是否不小于400角秒,若是,状态变换模块将视差图像信号的状态变换,返回步骤S4,否则,双眼整合能力平衡,执行步骤S7;
S7.通过噪声遍历判断模块判断当前噪声级别是否已遍历一级噪声、二级噪声及三级噪声,若是,通过立体视检测输出模块输出每一级别噪声下的立体视检测结果;否则,改变噪声级别,返回步骤S5。
在此,所述的“一种状态”为随机旋转状态变换、90度旋转状态变换、相位相反状态变换、相位平移状态变换、位移状态变换及正常状态变换这6中变换状态中的一种步骤S6所述根据用户分辨的立体视凹凸状态情况首先判断双眼视差是否不小于400角秒的目的是,首先利用噪声级别弱状态下检查左右眼,通过左右眼视差400角秒的标准,先判断出左右眼的平衡度,再进行后续详细层次的立体视功能检测。
优选地,所述双眼视差分级设定模块将双眼视差分为800角秒、400角秒、200角秒、100角秒及40角秒的等级,双眼视差等级依次降低,步骤S5包括:
S51.利用双眼视差分级设定模块设定双眼视差为800角秒;
S52.记录用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸状态情况;
S53.判断用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸状态情况是否正确,若是,双眼视差设定的等级降低一级,返回步骤S52,记录用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸错误点;否则,双眼视差设定的等级升高一级,返回步骤S52,记录用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸错误点;
S54.判断用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸错误点是否出现5次,若是,确定5个凹凸错误点对应的双眼视差,取5个凹凸错误点对应双眼视差的平均值作为视差结果B;否则,返回步骤S52,保证了评价立体视功能的严谨性。
优选地,步骤S7所述的每一级别噪声下的立体视检测结果包括:
噪声级别为三级噪声,双眼视差结果B满足:200角秒<B<800角秒时,用户立体视储备弱,双眼整合能力弱;
噪声级别为二级噪声,双眼视差结果B满足:200角秒<B<800角秒时,用户立体视储备中,双眼整合能力弱;
噪声级别为一级噪声,双眼视差结果B满足:200角秒<B<800角秒时,用户立体视储备强,双眼整合能力弱。
优选地,步骤S7所述的每一级别噪声下的立体视检测结果还包括:
噪声级别为三级噪声,双眼视差结果B满足:B≤200角秒时,用户立体视储备弱,双眼整合能力强;
噪声级别为二级噪声,双眼视差结果B满足:B≤200角秒时,用户立体视储备中,双眼整合能力强;
噪声级别为一级噪声,双眼视差结果B满足:B≤200角秒时,用户立体视储备强,双眼整合能力强。
优选地,步骤S7所述的每一级别噪声下的立体视检测结果还包括:
噪声级别为三级噪声,双眼看不到立体视人眼可识别形状时,用户双眼无立体视储备。
与现有技术相比,本发明技术方案的有益效果是:
本发明提出一种RDK立体视检测系统及其使用方法,利用RDK随机Gabor斑闪烁模型生成视差图像信号,视差图像信号的轮廓构成人眼可识别形状,避免常规检测图形设计复杂度高的缺陷;利用状态变换模块将视差图像信号以若干种状态变换,并利用噪声生成器生成噪声,左右眼通过视差图像信号的凹凸情况,即此时立体视功能的检测互不影响,而且观测、调节、处理集成为一个系统,检测处理过程灵活,解决了现有立体视检测方式中检测图形设计的复杂度高、检测处理过于机械以及单一的问题,提升立体视检测处理的灵活性,提高立体视功能检测结果的准确性。
附图说明
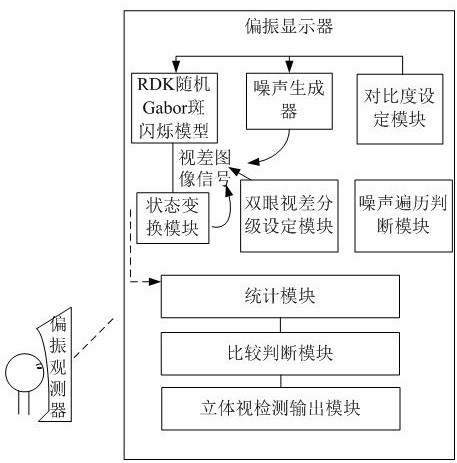
图1表示本发明实施例中提出的RDK立体视检测系统的结构框图;
图2表示本发明实施例中提出的加噪声的视差图像信号及视差图像信号的展示图;
图3表示本发明实施例中提出的视差图像信号轮廓构成的一种人眼可识别形状示意图。
具体实施方式
附图仅用于示例性说明,不能理解为对本专利的限制;
为了更好地说明本实施例,附图某些部位会有省略、放大或缩小,并不代表实际尺寸;
对于本领域技术人员来说,附图中某些公知内容说明可能省略是可以理解的。
下面结合附图和实施例对本发明的技术方案做进一步的说明。
实施例1
如图1所示的RDK立体视检测系统的结构图,参见图1,包括:
RDK随机Gabor斑闪烁模型,用于生成视差图像信号,视差图像信号的轮廓构成人眼可识别形状;
噪声生成器,用于生成干扰视差图像信号的噪声,所述噪声生成器生成的噪声包括一级噪声、二级噪声及三级噪声;
对比度设定模块,用于设定视差图像信号的对比度及视差图像信号加噪声的对比度;
状态变换模块,用于将RDK随机Gabor斑闪烁模型生成的视差图像信号以若干种状态变换;
双眼视差分级设定模块,将双眼视差由高到低依次设定划分为若干个等级;
偏振显示器,用于显示视差图像信号及加噪声的视差图像信号,在本实施例中,偏振显示器为3D偏振显示器;
偏振观测器,用于用户在进行立体视检测时,观测视差图像信号及加噪声的视差图像信号轮廓构成的人眼可识别形状;在本实施例中,偏振观测器为3D偏振眼镜;
统计模块,用于统计用户人眼观测分辨到的观测到视差图像信号轮廓构成人眼可识别形状的立体视凹凸状态情况;
比较判断模块,根据用户分辨的立体视凹凸状态情况,用于判断分辨的立体视凹凸状态情况对应的用户双眼视差是否符合要求;
噪声遍历判断模块,用于判断视差图像信号所加噪声的噪声级别是否已遍历一级噪声、二级噪声及三级噪声;
立体视检测输出模块,用于输出立体视的检测结果。
在本实施例中,一级噪声、二级噪声及三级噪声分别代表噪声强弱为:高、中、低;状态变换模块将视差图像信号以若干种状态变换的变换类型包括:随机旋转状态变换、90度旋转状态变换、相位相反状态变换、相位平移状态变换、位移状态变换及正常状态变换,此为6种空间频率变换形式,也是组成视差图像信号轮廓的相邻元素的参数变化,提高了立体视检测处理的灵活性。
RDK立体视检测系统用于用户左眼检测时,用户通过偏振观测器实现左眼观察视差图像信号,右眼观察的视差图像信号加噪声;RDK立体视检测系统用于用户右眼检测时,用户通过偏振观测器实现右眼观察视差图像信号,左眼观察的视差图像信号加噪声;所述噪声无规则均匀分布于整个信号生成区域,与视差图像信号为均匀分布,用户根据需要增加或减少噪声的数量,RDK立体视检测系统用于立体视检测时,用户的双眼均观察信号,如图2所示的加噪声的视差图像信号及视差图像信号的展示图,中间的“小框”为C,不论检测左眼还是右眼的立体视功能,C可以为两眼同时看到,避免了现有立体视的检测大多通过单一眼睛逐次检测的繁琐性。
视差图像信号通过RDK随机Gabor斑闪烁模型生成,如图3所示,在本实施例中,视差图像信号轮廓构成的一种人眼可识别形状为“N”,图3中的“N”字形由一个个的相邻元素构成,每一个元素为随机旋转状态变换、90度旋转状态变换、相位相反状态变换、相位平移状态变换、位移状态变换及正常状态变换中的一种变换状态,RDK随机Gabor斑闪烁模型的模型密度和闪烁频率可变,即每一帧的初始信号点和下一帧切换速率相同,RDK立体视检测系统用于用户左眼检测时,生成左眼观察的视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率,与生成右眼观察的加噪声视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率相同或不同;RDK立体视检测系统用于检测左眼时,生成右眼观察的视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率,与生成左眼观察的加噪声视差图像信号的RDK随机Gabor斑闪烁模型闪烁频率相同或不同,表示在左眼或右眼的同一检测中,闪烁频率可以不同,生成左右眼视差图像信号的RDK随机Gabor斑闪烁模型互不影响,在评价立体视功能时比较全面。
本发明还提出一种RDK立体视检测系统的使用方法,包括:
S1.明确用户待检测的眼别,利用RDK随机Gabor斑闪烁模型生成视差图像信号,利用噪声生成器生成噪声,并通过偏振显示器显示;
S2.利用对比度设定模块设置视差图像信号的对比度维持100%,视差图像信号加噪声对比度维持100%;
S3.利用状态变换模块将视差图像信号以若干种状态中的一种变换状态进行变换;
S4.利用双眼视差分级设定模块设定双眼视差,利用噪声生成器生成三级噪声;
S5.使用偏振观测器观测偏振显示器指定区域的视差图像信号,分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸状态情况,利用统计模块统计用户分辨的立体视凹凸状态情况;
S6.根据用户分辨的立体视凹凸状态情况,通过比较判断模块判断双眼视差是否不小于400角秒,若是,状态变换模块将视差图像信号的状态变换,返回步骤S4,否则,双眼整合能力平衡,执行步骤S7;
S7.通过噪声遍历判断模块判断当前噪声级别是否已遍历一级噪声、二级噪声及三级噪声,若是,通过立体视检测输出模块输出每一级别噪声下的立体视检测结果;否则,改变噪声级别,返回步骤S5。
在实际RDK立体视检测系统的应用中,首先确定待检测的左眼还是右眼,基于待检测的眼睛,确定左右眼视差图像信号的噪声处理对象,首先利用状态变换模块选定随机旋转状态变换、90度旋转状态变换、相位相反状态变换、相位平移状态变换、位移状态变换及正常状态变换这6中变换状态中的一种,设定对比度,然后以三级噪声“弱”状态下检查左右眼,通过左右眼是否相差400角秒及以上的标准判断左右眼平衡度,在左右眼首先平衡度有保证时,然后通过状态变换模块将视差信号的状态变换,继续加查其它5种状态变换。
在本实施例中,步骤S5包括:
S51.利用双眼视差分级设定模块设定双眼视差为800角秒;
S52.记录用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸状态情况;
S53.判断用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸状态情况是否正确,若是,双眼视差设定的等级降低一级,返回步骤S52,记录用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸错误点;否则,双眼视差设定的等级升高一级,返回步骤S52,记录用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸错误点;在此步骤中,采取“两升一降”的心理物理方式;
S54.判断用户分辨视差图像信号轮廓构成的人眼可识别形状的立体视凹凸错误点是否出现5次,若是,确定5个凹凸错误点对应的双眼视差,取5个凹凸错误点对应双眼视差的平均值作为视差结果B;否则,返回步骤S52。如从开始双眼视差设定800角秒,噪声级别从三级噪声“弱”级别开始,用户盯着偏振显示器中间的图2所示的信号观察,分辨信号的立体视凹凸状态情况,用户选择分辨认定的凹、凸之一,若分辨正确,则表示双眼视差设定800角秒下的双眼可以识别立体视效果,进一步降低双眼视差设定,再让用户分辨信号的立体视凹凸状态情况,如果分辨凹、凸出错,则将双眼视差设定升高,此时计作一个错误点。
在本实施例中,步骤S7所述的每一级别噪声下的立体视检测结果包括:
噪声级别为三级噪声,双眼视差结果B满足:200角秒<B<800角秒时,用户立体视储备弱,双眼整合能力弱;
噪声级别为二级噪声,双眼视差结果B满足:200角秒<B<800角秒时,用户立体视储备中,双眼整合能力弱;
噪声级别为一级噪声,双眼视差结果B满足:200角秒<B<800角秒时,用户立体视储备强,双眼整合能力弱。
在本实施例中,步骤S7所述的每一级别噪声下的立体视检测结果还包括:
噪声级别为三级噪声,双眼视差结果B满足:B≤200角秒时,用户立体视储备弱,双眼整合能力强;
噪声级别为二级噪声,双眼视差结果B满足:B≤200角秒时,用户立体视储备中,双眼整合能力强;
噪声级别为一级噪声,双眼视差结果B满足:B≤200角秒时,用户立体视储备强,双眼整合能力强。
在本实施例中,步骤S7所述的每一级别噪声下的立体视检测结果还包括:噪声级别为三级噪声,双眼看不到立体视人眼可识别形状时,用户双眼无立体视储备。
附图中描述位置关系的用于仅用于示例性说明,不能理解为对本专利的限制;
显然,本发明的上述实施例仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种RDK立体视检测系统及其使用方法
- 一种RDK立体视检测系统及其使用方法