一种基于机器视觉的城轨列车定位与测速方法
文献发布时间:2023-06-19 09:55:50
技术领域
本发明属于轨道交通领域。
背景技术
近年来,我国对铁路客运专线及城市轨道交通的投入力度不断加大,轨道交通地位日益提高。轨道车辆运行的位置信息是轨道交通车辆行驶、检测、维护的基础数据,其研究的重要性日益突显。随着人工智能技术的兴起,机器视觉、故障检测与诊断、无人驾驶等新技术在轨道交通行业的应用得到了蓬勃发展。为了保证列车的安全运行,更好地服务于车辆编组、调度、检测、维护等工作,研究一种车载高精度、实时、连续、自主定位的独立设备具有重要的理论和现实意义。
列车运行定位技术的基本功能是通过传感技术自动获取列车在线路上运行的位置信息、速度信息和区段占用信息。通常认为列车是沿轨道径向的一维运动,通过测量列车与线路基准参考点之间的距离,便可以实现列车的定位和跟踪。
当前列车定位技术主要采用下列方法,各自都有一定的利弊,达不到高精度、实时、连续、自主定位和跟踪的要求。
(1)基于测速的列车定位方法
通过不断获取列车的实时运行速度并积分得到列车运行的里程,该方法属于自主惯性导航,目前常用的测速方法主要有两种,一种是轮速法测速,另一种采用多普勒测速仪。
列车运行时轮对转动并带动编码器旋转,轮速法通过测量编码器脉冲频率和脉冲计数来计算车速和里程,工作原理简单、实现方便,计算基于轮对与轨道之间的纯滚运动和轮对几何尺寸。轮速法测速存在明显的缺陷:【1】当列车运行过程中发生轮对空转、蠕动、打滑时(例如刹车),会产生较大的测量误差;【2】磨损会改变轮对的几何尺寸,基于轮对几何尺寸测量列车里程会产生较大的测量误差;【3】轮对转动的角度过小,导致不能产生脉冲,产生累积误差。
将多普勒测速仪安装在列车底部,通过测量发射信号和反射信号的频率变化得到列车的运行方向和速度,再通过积分获取列车的运行里程。此方法基于独立测速设备,不涉及轮对的运动和磨损情况,但也存在明显的缺点:【1】多普勒测速对环境要求较高,环境不够平整导致电波散射,造成较大的测量误差;【2】通常多普勒测速仪采用俯视安装,需要对安装角度带来的测量误差进行修正;【3】通过积分获取列车运行里程造成较大的累积误差;【4】实验表明,列车低速行驶时多普勒测速仪具有较大的误差。
(2)基于查询应答器的列车定位方法
通过车载查询器读取地面应答器(信标)内置的位置信息实现列车的点定位。其优点是技术成熟(城轨已广泛使用)、定位精度高,在复线轨道上能正确区分不同的股道,特别适合消除列车定位过程中产生的累积误差。基于查询应答器的列车定位方法也存在明显的缺陷:【1】只能点定位,无法实现实时、连续定位;【2】沿轨道线路密集布设应答器成本太高,且当应答器位于无人区时,难以保养和维护。通常应答器都设置在城轨站点附近,两套应答器可能相距数公里以上。
(3)基于轨道电路的列车定位方法
轨道电路每个区段的起点和终点都设置有计轴器,通过获取计轴器的状态可以确定列车所在的轨道电路区段。该方法的优点是技术成熟、可靠性强,但定位误差大,无法实时准确给出列车在区段内的具体位置和速度信息。
(4)基于GPS/BDS的列车定位方法
卫星定位原理简单,可实现全天候全时段工作。但易受自然环境影响,运行在山区或者隧道的列车,存在定位盲区,目前的定位精度无法区分复线股道。城轨主要运行在地下隧道,卫星导航的精确度、可靠性、可用性受到质疑。
发明内容
发明目的:为解决上述背景技术中存在的问题,本发明提供了一种基于机器视觉的城轨列车定位与测速方法。
技术方案:本发明提供了一种基于机器视觉的城轨列车定位与测速方法,该方法包括具体包括如下步骤:
步骤1,在靠近地铁车站的轨道线路上设置视觉信标,并对每个视觉信标进行图形编码,每个图形编码中包括对应的视觉信标的准确位置信息;
步骤2:将图像采集一体机安装在列车底部,所述图像采集一体机实时采集列车行驶时的轨道图像,并将其传输到车内视觉处理系统;
步骤3:列车在线路上试运行,图像采集一体机实时采集运行时的轨道线路图像;车内视觉处理系统将采集的图像进行预处理,并将处理后的图像作为训练样本,采用改进的YOLO算法进行训练,得到轨枕目标检测的权重文件;
步骤4:列车正式运行,图像采集一体机实时采集轨道线路图像,并采用改进的YOLO算法和步骤3中的权重文件,对图像进行实时处理,识别图像中的轨枕和列车行驶方向,并对轨枕进行计数;
步骤5:根据识别出的连续的轨枕数量和相邻轨枕之间的间距,通过插值计算出列车的位置和速度;当采集到的图像中包含视觉信标,计算通过轨枕得到的当前列车的位置信息与视觉信标的图形编码中的准确位置信息之间的偏差,对此时列车的位置进行校正,消除系统的累积误差。
进一步的,所述视觉信标为无源的视觉信标,该视觉信标采用铝合金面板喷绘条码,该信标通过重物基座安装在靠近地铁车站的轨道线路上。
进一步的,所述图像采集一体机包括:上L形板,下L形板,连接板,LED光源支架;所述上L形板固定安装在列车底部,下L形板的一端与上L形板固定连接,另外一端与连接板的一面固定连接,连接板的另外一面的中心处设置高速工业相机,LED光源支架设置在高速工业相机的四周,且与连接板固定连接。
进一步的,所述图像采集一体机还包括防护罩,该防护罩具备相机遮挡报警功能;该防护罩为圆柱形防护罩,圆柱形防护罩的柱身采用铝合金,底部设有防尘玻璃,该防护罩将高速工业相机和LED光源支架包裹住,且与连接板固定连接;该防护罩通过相机拍摄的图像,判断是否有异物或尘雾遮挡在防尘玻璃上,若有,则发出警报。
进一步的,改进的YOLO算法网络结构为21层,包括卷积层、最大池化层、直通层和输出层;所述输出层输出轨枕中心位置的偏移,高宽偏移,置信度和类别概率;所述卷积层包括卷积、批量归一化和激活函数,激活函数采用Leaky-ReLU函数,其表达式为:
f(x)=max(ax,x)
其中:a为常数,x为输入量,max(.)为取最大值函数。
进一步的,所述步骤3中改进的YOLO算法在进行训练时采用的损失函数L(O,o,C,c,l,g)包括目标定位偏移量损失函数L
L(O,o,C,c,l,g)=λ
其中λ
其中pos为所有的真实框,
目标置信度损失函数L
o
目标分类损失函数L
其中Pos为所有的预测目标边界框,cla为所有目标类的Sigmoid概率,O
有益效果:本发明将图像特征提取与卷积神经网络相结合,用于轨枕的快速检测、识别、定位和跟踪;本发明可实时处理帧频300fps的轨道线路图像,轨枕识别正确率达到100%,可以实现城轨列车在120km/h运行时的轨枕计数、列车定位和测速,本发明能以0.02秒的时间周期连续更新列车的位置信息、速度信息,综合定位精度<0.1米,区间测速精度达到0.10km/h。
附图说明
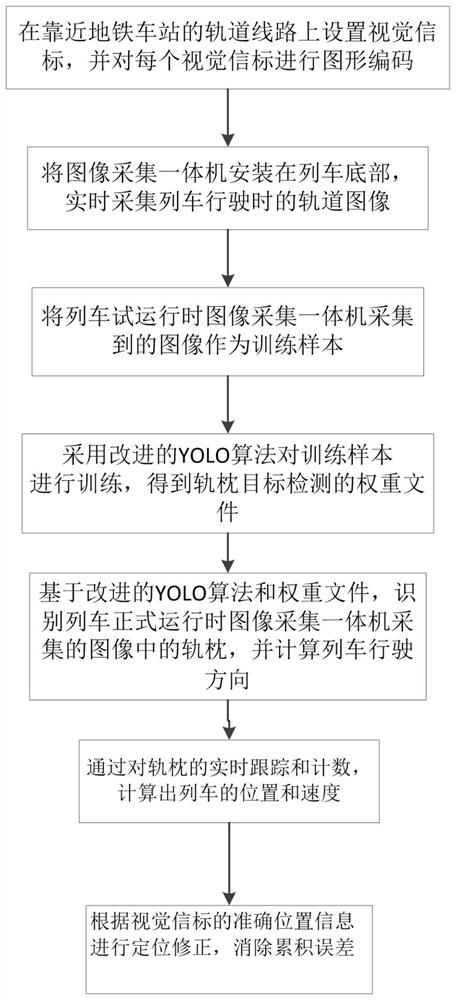
图1为本发明的流程图;
图2为图像采集一体机的结构图;其中(a)为图像采集一体机的仰视图,(b)为图像采集一体机的俯视图;
图3为防护罩的结构图;其中(a)为防护罩的主视图,(b)为防护罩的仰视图
图4为改进的YOLO算法的网络结构图;
图5为神经元和激活函数的示意图;
图6为本发明采用的网络模型与yolov3模型对轨枕进行检测的效果对比图。
具体实施方式
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
如图1所示,本实施例提供一种基于机器视觉的城轨列车定位与测速方法,通过高帧频工业相机拍摄轨道线路和定点设置视觉信标,采用改进的YOLO算法对图像进行实时处理,得到轨枕计数,实现城轨列车的定位和测速。具体为:
步骤1:在靠近地铁车站的轨道线路上设置视觉信标,并对每个视觉信标进行图形编码,每个图形编码中包括对应的视觉信标的准确位置信息,所述准确位置信息值视觉信标的精确位置信息,该位置信息是准确的。
步骤2:将图像采集一体机安装在列车底部,实时采集列车行驶时的轨道图像,并将其传输到车内视觉处理系统。
步骤3:列车在线路上试运行,图像采集一体机实时采集运行时的轨道线路图像;车内视觉处理系统将采集的图像进行预处理,并将处理后的图像作为深度学习的训练样本,采用改进的YOLO算法进行训练,得到轨枕目标检测的权重文件。
步骤4:列车正式运行,图像采集一体机实时采集轨道线路图像,并采用改进的YOLO算法和步骤3中的权重文件,对图像进行实时处理,识别图像中的轨枕和列车行驶方向,并对轨枕进行计数。
步骤5:根据识别出的连续的轨枕数量和相邻轨枕之间的间距,通过插值计算出列车的位置和速度;当采集到的图像中包含视觉信标,计算通过轨枕得到的列车位置与视觉信标的图形编码中的位置信息之间的偏差,对此时列车的位置进行校正,消除系统的累积误差。
在本实施例中,所述视觉信标为无源信标,采用铝合金面板喷绘条码,该视觉信标安装在重物基座上,设置在地铁车站附近的轨道线路上。
在本实施例中,如图2中的图(a)和图(b)所示,所述图像采集一体机包括:上L形板,下L形板,连接板,LED光源支架;所述上L形板固定安装在列车底部,下L形板的一端与上L形板固定连接,另外一端与连接板的一面固定连接,连接板的另外一面的中心处设置高速工业相机,LED光源支架设置在高速工业相机的四周,且与连接板固定连接。所述高速工业相机能够高帧频的拍摄轨道线路图像,并将其准确,可靠的传送至车内视觉处理系统。
在本实施例中,如图3所示,所述图像采集一体机包括防护罩和相机遮挡报警。该防护罩为圆柱形防护罩,圆柱形防护罩的柱身采用铝合金,底部设有防尘玻璃,该防护罩将高速工业相机和LED光源支架包裹,且与连接板固定连接;所述相机遮挡报警通过相机拍摄的图像,判断是否有异物或尘雾遮挡在防尘玻璃上。所述防护罩能够防水、防尘、防雾,能够不惧用水冲洗,防止镜头被尘雾遮挡,且该防护罩受到列车行驶时空气动力学的激励,进行了降噪设计;
在本实施例中,所述目标检测算法针对相机安装位置和焦距固定不变、图片尺寸和视野不变、目标尺度较为固定的特点,对YOLO(You only look once)算法进行了改进,以提高图像实时处理的能力。
如图4所示,改进的YOLO算法网络结构为21层,本实施例中采集得到的图片尺寸固定为720×540且为单通道图像,故将720×540×1作为网络的输入,输出为4692维的特征向量,改进的YOLO目标检测算法包括卷积(Convolutional)层、最大池化(Maxpool)层、直通(PassThrough)层和输出(Output)层。所述卷积层包括卷积、批量归一化(BatchNormalization)和激活函数。
所述卷积层的padding和步距默认为1。该层主要实现对特征的提取。BN层是在进行深度神经网络训练时经常采用的一种算法。其主要作用是对数据进行归一化,实现快速收敛,提高训练速度。网络训练的本质就是学习数据分布,一旦训练数据和测试数据的分布不同,网络的泛化能力就会大大降低。数据没有归一化,容易造成每一批次数据分布不同,网络就要在每次迭代的时候都去适应不同的分布,大大降低网络的训练速度。在训练网络的过程中,各层的输出数据一直在发生变化,因此在卷积层后通常需要增加BN层。图片进行归一化处理还可以减少光照、对比度等外部环境的影响。
Leaky-ReLU激活函数
如图5所示,神经网络中的每个神经元节点接受上一层神经元的输出值作为本神经元的输入值,并将本神经元的输出值传递给下一层。引入非线性激励函数,深层神经网络输出不再是输入的线性组合,而是几乎可以逼近任意函数。
常用的激活函数有:sigmoid函数、tanh函数、Relu函数等。本实施例中采用了改进的Leaky-Relu函数,表达式为f(x)=max(ax,x)(a为常数,x为输入量,max(.)为取最大值函数,通常a很小,常用值0.01);Leaky-Relu函数保留了ReLU函数收敛速度远快于sigmoid和tanh的优点,在一定程度上避免了Dead ReLU问题。
最大池化层
对一定尺寸区域的图像取其最大特征值来代替原来的图像区域。Pooling可以增大视野;池化操作不断抽象区域特征而不关心位置,在一定程度上增加了平移不变性;池化计算便捷,可以大大降低模型的参数量和优化工作量。
直通层
借鉴ResNet网络,将高分辨率的特征图进行PassThrough操作,即宽、高变为原来的一半,深度变为原来的四倍,再与低分辨率的特征图进行连接,得到新的特征图,从而降低梯度消失的可能性,提高网络训练速度,且保留了高分辨率特征图的部分特征。
输出层
输出层是一个与23x17x1024连接的1x1x4692的卷积层(不包含BN层和激活函数),其中4692=(5+1)×2×23×17,即最后得到的23x17的特征图,每一个单元预测两个AnchorBox,每个Anchor Box包含位置偏移、宽高偏移、置信度和类别概率。
在本实施中,所述步骤3采用了改进的YOLO目标检测算法网络结构进行有监督的学习。改进的YOLO算法在进行训练时采用的损失函数L(O,o,C,c,l,g)包括目标定位偏移量损失函数L
L(O,o,C,c,l,g)=λ
其中λ
其中pos为所有的真实框,
目标置信度损失函数L
o
目标分类损失函数L
其中Pos为所有的预测目标边界框,cla为所有目标类的Sigmoid概率,O
如图6所示,本实施例相较于较于yolov3模型,本实施例的方法对轨枕目标拥有更好的检测效果。
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
- 一种基于机器视觉的城轨列车定位与测速方法
- 一种基于机器视觉的指针式仪表定位与识别方法