一种工业机器人与激光跟踪仪坐标系对齐方法
文献发布时间:2023-06-19 09:55:50
技术领域
本申请涉及机器人领域,尤其涉及一种工业机器人与激光跟踪仪坐标系 对齐方法。
背景技术
工业机器人作为集机械、电子、控制、计算机和人工智能等多学科先进 技术于一体的装备,具有自动控制、可重复编程和通用性强等特点。时至今 日,工业机器人已成为自动化生产领域的核心装备,被广泛地应用于汽车制 造、机械加工、集成电路和食品加工等对产品质量和生产效能要求较高的领 域。
为满足自动化生产的要求,环境感知、定位精度和运动控制是机器人技 术的三个基本问题,而定位精度是衡量机器人性能的关键指标。一般工业机 器人的重复定位精度较高,但绝对定位精度较差。为测量工业机器人的定位 精度,激光跟踪仪是一种常用的设备。如何建立激光跟踪仪坐标系与工业机 器人坐标系之间的转换关系是进行精度测量工作的前提。目前各大激光跟踪 仪厂商都开发了专用的商业软件,如Leica、FARO等,但软件的价格高昂, 不适合广大用户使用。为降低使用代价,已有一些坐标系对齐方法,如通过 机器人单轴旋转生成3个空间圆,然后通过其法向量获得旋转矩阵,从而反 推建立机器人基础坐标系;通过直线拟合获得机器人基坐标系的方向向量, 然后通过建立平移矩阵实现坐标系对齐。但这些方法实际操作复杂,且对齐 误差较大,精度较低,难以满足高精度测量的使用要求。在文献[1]张博,魏 振忠,张广军.机器人坐标系与激光跟踪仪坐标系的快速转换方法[J].仪器 仪表学,2010,31(9):1986-1990和文献[2]向民志,范百兴,李祥云,隆昌宇.激光跟踪仪与机器人坐标系转换方法研究[J].航空制造技术,2018, 61(Z1):98-101.中,最终对齐误差分别为:
发明内容
本申请为解决上述技术问题提供一种工业机器人与激光跟踪仪坐标系 对齐方法。
本申请所采取的技术方案是:一种工业机器人与激光跟踪仪坐标对齐方 法,其特征在于,包括测量系统,所述测量系统包括工业机器人、示教器、 控制器、激光跟踪仪、固定架、光学靶球和靶座,所述工业机器人和示教器 连接在控制柜上,所述激光跟踪仪安装在固定架上,并通过电缆与计算机相 连,所述光学靶球放置在靶座上,且通过靶座固定在工业机器人末端。
工业机器人与激光跟踪仪坐标对齐包括以下步骤:
S1、通过拉丁超立方抽样方法在工业机器人运动空间内随机抽取K个样 本点,并将这些样本点坐标值输入示教器中;
S2、通过示教器操作工业机器人依次到达这些样本点位置,同时采用激 光跟踪仪记录对应样本点在激光跟踪仪坐标系中的位置坐标;
S3、根据步骤S1样本点的实际坐标值、步骤S2激光跟踪仪记录的测量 坐标值,构建三个坐标方向的Kriging模型,并计算实际坐标值和测量坐标 值的误差值,利用误差值对激光跟踪仪坐标系进行修正。
进一步的,所述步骤S3中,Kriging模型的构建是根据抽取K个样本点 的测量坐标值作为Kriging模型的输入,样本点的实际坐标分量分别作为 Kriging模型的输出。
本申请具有的优点和积极效果是:本申请的一种工业机器人与激光跟踪 仪坐标系对齐方法,采用Kriging代理模型技术建立激光跟踪仪坐标系与工业 机器人基础坐标系之间的映射关系,从而利用激光跟踪仪的软件测量工业机 器人定位精度和轨迹精度;采用Kriging代理模型技术简化了现有激光跟踪仪 与工业机器人坐标系对齐方法的操作步骤,且由于Kriging模型可以实现空间 最优无偏估计,坐标系对齐精度高,能够更精确地测量工业机器人末端坐标; 与商业测试软件相比,该方法在取得较高测试精度的同时大大较低了使用成 本。
除了上面所描述的本申请解决的技术问题、构成技术方案的技术特征以 及由这些技术方案的技术特征所带来的优点之外,本申请所能解决的其他技 术问题、技术方案中包含的其他技术特征以及这些技术特征所带来的优点, 将在下文中结合附图作进一步详细说明。
附图说明
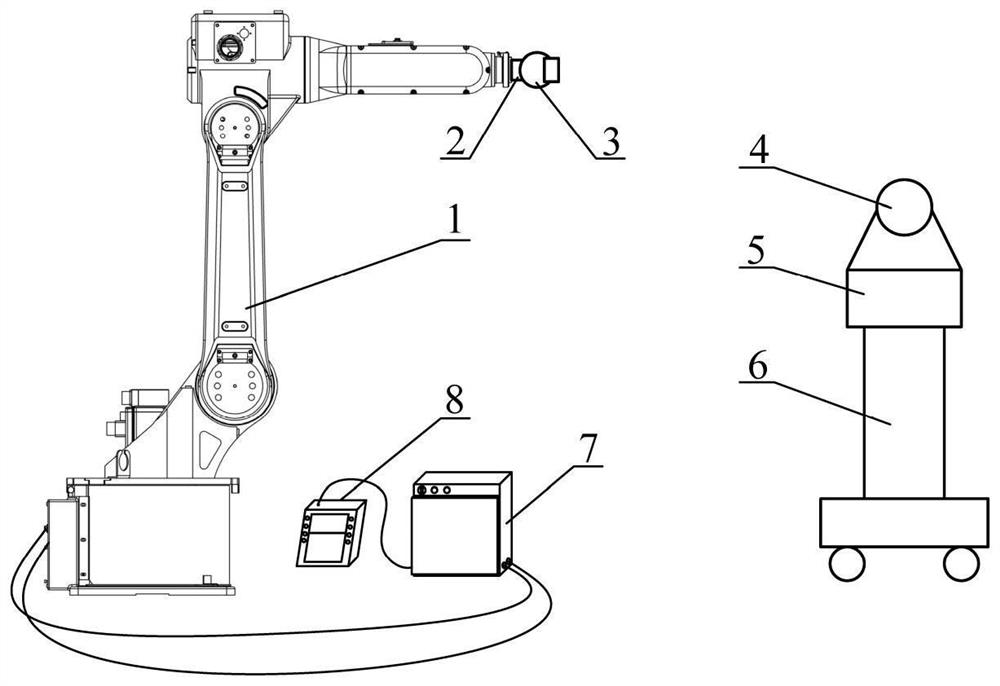
图1是本申请背景技术提供测量系统示意图。
图中:1工业机器人;2靶座;3光学靶球;4激光装置;5激光跟踪仪; 6固定架;7控制柜;8示教器。
具体实施方式
下面结合附图和实施例对本申请作进一步详细说明。可以理解的是,此 处所描述的具体实施例仅用于解释相关发明,而非对该发明的限定。另外还 需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特 征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
一种工业机器人1与激光跟踪仪5坐标对齐方法,包括测量系统,所述 测量系统包括工业机器人1、示教器8、控制器7、激光跟踪仪5、固定架6、 光学靶球3和靶座2,所述工业机器人1和示教器8与控制柜7相连,所述 激光跟踪仪5安装在固定架6上,并通过电缆与计算机相连;所述光学靶球 3放置在靶座2上,且通过靶座2设置在工业机器人1上,在测试过程中, 光学靶球3始终能接收到激光跟踪仪5上激光装置4发射的激光。
工业机器人1与激光跟踪仪5坐标对齐包括以下步骤:
S1、通过拉丁超立方抽样方法在工业机器人1运动空间内随机抽取K个 样本点,并将这些样本点坐标输入示教器8中;
S2、通过示教器8编程控制工业机器人1依次到达样本点,同时采用激 光跟踪仪5记录对应样本点在激光跟踪仪5坐标系中的位置坐标;
S3、根据步骤S1样本点的实际坐标值、步骤S2激光跟踪仪5记录的测 量坐标值,构建三个坐标方向的Kriging模型,并计算实际坐标值和测量坐 标值的误差值,利用误差值对激光跟踪仪5坐标系进行修正。
本实施例中,Kriging模型的构建是根据抽取的K个样本点的测量坐标 值作为Kriging模型的输入,样本点的实际坐标分量分别作为Kriging模型的 输出。
本实施例中,Kriging模型的建立步骤如下:
1、初始假设
记激光跟踪仪记录的坐标为(x′,y′,z′),工业机器人示教器中实际坐标为 (x,y,z),并令m=[x′,y′,z′],g=[g
g
式中,F(β,m)=f
Cov[z(m
式中,R
式中,l表示m
2、建立Kriging模型
采用拉丁超立方抽样方法在工业机器人工作空间随机抽取20个样本点, 并根据步骤1中的假设建立Kriging模型。以m和g
为保证预测值的无偏性,需要保证误差的均值为0,即
式中,R为相关函数矩阵,R
为保证Kriging模型的无偏性,准确预测工业机器人在任意点的坐标值, 应使误差的均方差最小。根据上述无偏性条件,进行如下优化,即:
引入拉格朗日函数求解式(6),即L(C,λ)=Φ(m)-λ
将式代入
式中,β
同理,可得到关于y坐标分量和z坐标分量的Kriging模型。
3、根据建立的Kriging模型进行验证
以100个点作为测试点,将激光跟踪仪测得的100个点的坐标输入建立 的Kriging模型中,从而得到对应点在工业机器人坐标系下的预测坐标值。 将预测坐标值与实际坐标值进行对比,从而得到坐标系对齐后对应坐标的误 差Δx、Δy和Δz。
100个测试数据如表1所示,坐标系对齐误差如表2所示:
表1 100个测试点的实际坐标值、测量坐标值和Kriging模型预测坐标值
表2坐标系对齐误差
表2中,每个坐标方向的误差为对应坐标的实际坐标值和预测坐标值差 值的绝对值,每个坐标方向误差的平均值表示100个测试点误差的平均值, ΔP表示预测坐标值与实际坐标值误差的绝对值。
由表2可知,该坐标系对齐方法大大提高了坐标对齐精度,可以更精确 地测量工业机器人末端坐标;与商业测试软件相比,该方法在取得较高测试 精度的同时大大较低了使用成本。
以上对本申请的实施例进行了详细说明,但所述内容仅为本申请的较佳 实施例,不能被认为用于限定本申请的实施范围。凡依本申请的申请范围所 作的均等变化与改进等,均应仍归属于本申请的专利涵盖范围之内。
- 一种工业机器人与激光跟踪仪坐标系对齐方法
- 一种基于激光跟踪仪的双机器人基坐标系标定方法