机器人的对人保护装置
文献发布时间:2023-06-19 09:57:26
技术领域
本发明涉及用于保护工业用机器人的周围的操作人员不与该机器人碰撞的对人保护装置。
背景技术
近年来,在工业产品的制造现场等,为了应对劳动人口不足、提高产品质量的要求,正在开发代替人来进行以往由人进行的操作的协作机器人。该协作机器人配置在例如各种操作工序中产生操作人员空缺的工序中,该协作机器人在与操作人员相邻的状态下进行操作等,与现有的工业用机器人不同,在未用安全围栏包围的状态下使用。因此,在使用协作机器人的情况下,需要用于保护协作机器人周围的操作人员不与协作机器人碰撞的对人保护装置。
对于现有的用安全围栏包围的工业用机器人,也在开发机器人的对人保护装置(以下,也仅称为“对人保护装置”。),例如在专利文献1中提出了如下方法:若携带便携装置(信号发送器)的操作人员在安全围栏内进行调整操作等时接近机器人,则从便携装置发送的识别信号通过人体通信传递到机器人,从机器人接收到该识别信号的机器人控制装置使机器人停止或者减速,来防止机器人与操作人员碰撞。
另一方面,专利文献2中提出的防碰撞装置(对人保护装置)是以协作机器人为对象的装置,将与人体通信发送器(信号发送器)连接的电极设置于操作场所的地面,若站在地面上的操作人员接近机器人,则由人体通信发送器生成的识别信号从地面的电极通过人体通信传递到机器人侧的接收器,与该接收器连接的机器人控制机使机器人停止。
专利文献1:日本特开2010-188458号公报
专利文献2:日本特开2013-193137号公报
在上述专利文献1、2中提出的机器人的对人保护装置均是利用电场方式的人体通信技术的装置,能够以非常简单的电路方式检测操作人员与机器人的接近。
然而,电场方式的人体通信是利用人体所具有的极微小的静电场,在通信对象进入到覆盖从人体的表面到数厘米的区域的静电层时进行信号传递的通信方式,因此在利用该通信方式的机器人的对人保护装置中,在机器人进入到距操作人员的体表数厘米以内的距离之前无法检测两者的接近,在机器人高速动作的情况下,即使在检测出机器人与操作人员的接近后使机器人停止,也存在无法避免两者碰撞的可能。
另外,在专利文献2的对人保护装置中,每当作为对象的协作机器人的使用场所发生变化时,就需要设置与该场所的地面相应的形状的电极,也就存在变更该电极的形状、设置操作产生麻烦的问题。
发明内容
因此,本发明的课题在于,在利用协作机器人的电场方式的对人保护装置中,以不使用地面电极的简单结构,延长能够检测机器人与操作人员的接近的距离。
为了解决上述的课题,本发明是机器人的对人保护装置,在机器人与在该机器人的周围操作的操作人员接近时,使机器人进行用于避免与操作人员接触的动作(以下,称为“避免接触动作”。),该机器人的对人保护装置具备:交流电压附加装置,被上述操作人员保持,在该操作人员的体表附近施加绝对值比人体所具有的静电场大的正负变动的交流电场;电极,设置于上述机器人;以及测量器,测量上述电极中的电压,该机器人的对人保护装置基于由上述测量器测量出的电压值向机器人的控制器发送信号,来控制机器人的动作。
即,在使用现有的人体通信的对人保护装置中,认为如果能够检测机器人与操作人员接近的距离短的话,在人体表附近通常产生的静电场微小,根据人体的肌肉活动、周围的带电状况产生微小的变化,但只要不放电,就成为几乎视为一定的带电状态,因此在本发明中,利用由操作人员保持的可穿戴型的交流电压附加装置对操作人员的体表附近的电场附加正负变动的交流电压,来增大人体的带电状态,从而能够检测机器人与操作人员接近的距离(以下,称为“最长检测距离”。)变长。
而且,在现有方式中,由于最长检测距离只有数厘米左右,因此机器人的避免接触动作实质上仅限定于停止动作,与此相对,在本发明中,如上所述,由于能够延长最长检测距离,因此在机器人与操作人员接近时,能够使机器人进行发送警报、减速、停止等避免接触动作中的与所检测的距离相应的适当的动作。
另外,通过使对人体施加的电场不是直流电场而是正负变动的交流电场,能够消除从人体向周边设备的放电的可能,而消除因放电引起的人体的电场强度的变动,也消除了伴随着放电的噪声的产生以及周边设备的故障、误动作的担忧。
在这里,对操作人员的体表附近的电场附加的交流电压,只要使其有效值比人体的通常所具有的水平的静电场高即可,具体而言,优选为3Vrms~10Vrms。这是因为若有效值低于3Vrms,则难以得到充分的检测距离,若高于10Vrms,则交流电压附加装置的功率消耗变大,需要频繁地进行充电、电池更换等。而且,如果将有效值设为3Vrms~10Vrms,则能够使最长检测距离成为1m左右。
另外,对于交流电压的频率并没有特别地限制,但优选为几MHz~几十MHz。这是因为若超过几十MHz,则人体可以说成为天线,而附加的电压作为噪声向外部释放,有可能使人体不带电,如果小于几MHz的话,交流电压附加装置大型化,容易变得难以携带。而且,如果将频率设为几MHz~几十MHz,则容易与小于几MHz的AM波、各种无线、超过几十MHz的FM广播、无线LAN等外部因素的噪声进行区别。因此,例如,为了仅检测交流电压附加装置的频率的电压信息,通过在电极与测量器之间设置滤波器、或通过测量器进行频率分析,能够更高精度地检测机器人与操作人员的接近。
然而,即使采用上述结构的对人保护装置,根据机器人的设置场所,由于施加在地上的防静电措施、绝缘性的涂装的影响,存在即使在测量器侧接地,接地电位也不会成为0V,在交流电压附加装置和测量器中基准电位不同,机器人与操作人员的距离的检测变得困难的情况。另外,操作人员侧也有伴随移动的操作的情况,也有原本难以接地的情况。进一步,由于操作人员的动作、衣着的材质等的影响,也存在检测变得困难的情况。
在这样的情况下,通过在上述交流电压附加装置和测量器中的至少一方连接有具有上述交流电压附加装置的频率的1/4电气长度的接地电极,无论机器人的设置场所如何都能消除交流电压附加装置与测量器的基准电位差,能够稳定且高精度地进行检测动作。特别是,由于操作人员侧的接地电位容易变得不稳定,因此使交流电压附加装置的接地电极具有1/4电气长度的效果较大。此外,该接地电极优选在操作人员保持交流电压附加装置的状态、设置于机器人的状态下,调整为交流频率的1/4电气长度来使用。另外,根据需要,将多个具有该1/4电气长度的接地电极并联连接,也能够进行更稳定的检测动作。
本发明具有如上述那样的结构以及作用,因此在上述机器人是与操作人员进行共同操作的协作机器人的情况下,能够特别有效地应用。
而且,如果为操作人员保持多个上述交流电压附加装置的结构,则在存在操作人员与多个机器人接触的情况下,例如在操作人员的两侧配置有协作机器人的情况下,也能够分别检测各机器人与操作人员的接近。此时,如果上述多个交流电压附加装置附加相互不同的频率的交流电压,并利用上述测量器测量各个频率的电压,则通过比较各个频率的电压,能够提高各机器人与操作人员的距离的检测精度、推断操作人员的姿势,能够更细致地进行用于对人保护的机器人的控制。
另一方面,作为上述交流电压附加装置,如果采用帽子型、头盔型等能够佩戴在上述操作人员的头部的装置,则在操作人员的身体的左右几乎没有电场强度差,能够大致左右均等地进行接近检测,因此即使在操作人员左右存在与机器人接触的可能性的操作环境中,佩戴个数是一个即可等,操作变得容易。此时,在一台机器人的周围配置多个上述操作人员的情况下,优选使佩戴于各操作人员的交流电压附加装置附加相互不同的频率的交流电压,并通过上述测量器测量各个频率的电压。这是因为,若对多个操作人员附加相同频率的交流电压,则根据机器人和操作人员的配置,存在使各操作人员带电的交流电压相互影响,由机器人的电极检测的电压值过大或者过小的情况。
本发明的机器人的对人保护装置如上述那样,通过由操作人员保持的交流电压附加装置在操作人员的体表附近施加绝对值比人体所具有的静电场大的正负变动的交流电场,在机器人与操作人员接近时,通过测量器测量设置于机器人的电极中的电压,基于该电压值向机器人的控制器发送信号,来控制机器人的动作,因此与现有的使用人体通信的机器人相比,最长检测距离长,对于高速动作的机器人也能够确保充分的安全性。
另外,通过使对操作人员的体表附近的电场附加的电压为正负变动的交流电压,能够避免操作人员与周围的物体之间的放电现象,不会使操作人员和周边的设备类产生放电损害,而能够安全地使用。
另外,由于该交流电压附加装置由操作人员保持,电极以及测量器设置于机器人侧,因此与现有的使用地面电极的装置相比,结构简单,即使机器人的使用场所改变,也无需变更电极的形状、设置操作,能够高效地进行机器人的移设。
附图说明
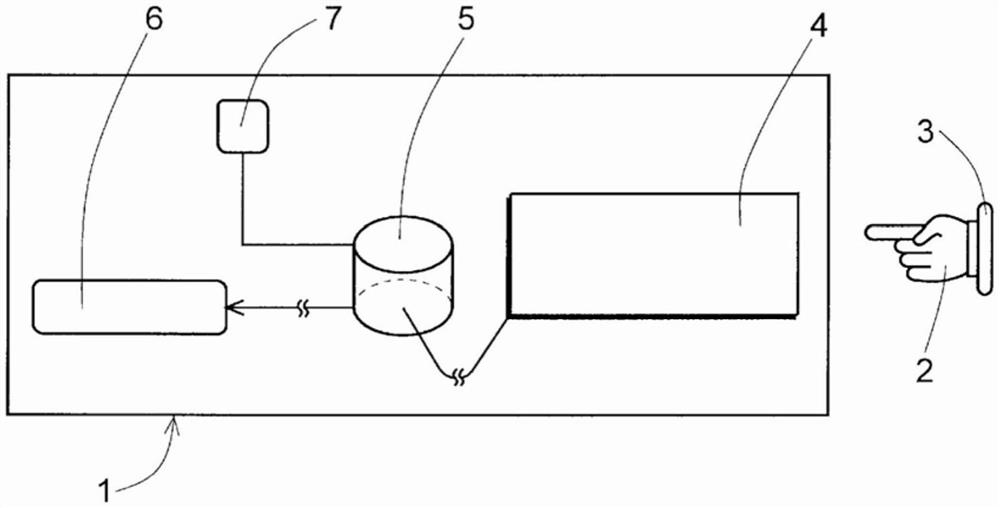
图1是本发明的对人保护装置的基本结构的说明图。
图2是图1的交流电压附加装置的基本结构的说明图。
图3是应用了第一实施方式的对人保护装置的机器人的主视图。
图4是图3的机器人与操作人员的接近状态下的平面位置关系的说明图。
图5是对图3的控制器的控制方法进行说明的图表。
图6是对第二实施方式的对人保护装置的应用状态的概要进行说明的俯视图。
图7A是交流电压附加装置的变形例(帽子型)的主视图。
图7B是交流电压附加装置的变形例(帽子型)的主视图。
图8A是交流电压附加装置的另一变形例(头盔型)的主视图。
图8B是图8A的局部剖切主视图。
图8C是改变了图8A、图8B的部件配置的例子的主视图。
图9是对第三实施方式的对人保护装置的应用状态的概要进行说明的俯视图。
具体实施方式
以下,基于附图对本发明的实施方式进行说明。如图1所示,本发明的机器人的对人保护装置基本上由如下部件构成:交流电压附加装置3,被在机器人1的周围操作的操作人员2(仅图示前臂)保持,对操作人员2的体表附近的电场附加正负变动的交流电压;电极4,设置于机器人1;以及测量器5,测量电极4的电压,该测量器5与机器人1的控制器6连接。该测量器5优选如图示那样连接有接地电极7。另外,控制器6使用一般的马达驱动器、控制器。
如图2所示,上述交流电压附加装置3的构成包括:交流电流附加电路31、与交流电流附加电路31连接的电极32以及接地电极33,上述交流电压附加装置3是从该电极32向操作人员附加交流电压的可穿戴设备,在图1中例示了佩戴在操作人员2的手腕上的手镯型的设备。
交流电流附加电路31由直流电源34、开关35、稳定化电源电路36、振荡电路37以及RF放大电路38构成,在该RF放大电路38的输出侧连接有电极32和接地电极33。在本例中,作为直流电源34使用9V的干电池,将振荡电路37的振荡频率设为12MHz,并且为了使向振荡电路37供给的功率稳定,组装+3.3V的稳定化电源电路36,向操作人员2附加9V、12MHz的交流电压。
另外,接地电极33将留有向交流电流附加电路31连接的连接部分和前端部的中央部卷绕在树脂制筒管39上而能够紧凑地配置,在操作人员2保持交流电压附加装置3的状态下,以成为对操作人员2附加的交流电压频率(12MHz)的1/4的电气长度的方式调整长度等。通过使用该1/4电气长度的接地电极33,能够减少外部噪声的影响。
此外,作为直流电源,除了如本例这样的干电池之外,也能够使用充电电池。另外,根据需要,也能够组装用于将直流电源的电压升压或者降压至任意的大小的DC-DC电源电路。另一方面,根据使用状况,可以省略稳定化电源电路,也可以接地电极不具有1/4电气长度。
而且,若通过该交流电压附加装置3的作用,当在操作人员2的体表附近施加绝对值比人体所具有的静电场大的正负变动的交流电场的状态下,因机器人1与操作人员2接近从而机器人1侧的电极4的电压变高,则向控制器6发送与测量器5所测量的电压值相应的用于对人保护的控制信号,基于控制器6从测量器5接收到的控制信号来使机器人1减速、或者停止。
图3~图5表示本发明的第一实施方式。如图3所示,应用了该第一实施方式的对人保护装置的机器人1在台车9的上表面安装有机器人主体10和控制器6,上述台车9在下表面侧具有多个滚轮8,能够向各种操作场所移动的协作机器人。另外,如图4所示,在与该机器人1相邻的状态下操作的操作人员2,在其手腕上佩戴有手镯型的交流电压附加装置3。该交流电压附加装置3所附加的交流电压的有效值为3Vrms~10Vrms、频率为几MHz~几十MHz。此外,也可以在交流电压附加装置3上安装例如LED灯等,能够显示电源的功率没有问题。
如图3以及图4所示,上述机器人1的机器人主体10具备:固定于台车9的上表面的基座11、在基座11的上部安装为在水平面内自由转动的第一臂12a、以及在第一臂12a的前端部安装为在水平面内自由转动的第二臂12b。在该基座11的上部内置有使第一臂12a转动的第一致动器13a,在第一臂12a的前端部内置有使第二臂12b转动的第二致动器13b。而且,在第二臂12b的前端部安装有末端执行器14。
另外,在机器人主体10的第一臂12a以及第二臂12b各自的上表面以及两个侧面各粘贴有一个板状的电极4a、4b,在机器人主体10的第一臂12a以及第二臂12b各自的基端部内置有与各电极4a、4b连接的测量器5a、5b。各测量器5a、5b与控制器6以及接地电极(省略图示)连接,该接地电极使用具有交流电压附加装置3的频率的1/4电气长度的接地电极。
该对人保护装置的构成包括:上述的操作人员2侧的交流电压附加装置3、机器人1侧的电极4a、4b、带接地电极的测量器5a、5b,若机器人1与操作人员2接近,则机器人1侧的电极4a、4b的电压上升,测量该电压的测量器5a、5b将与电压值相应的控制信号发送到机器人1的控制器6,控制器6使机器人1进行用于避免与操作人员2接触的动作(避免接触动作)。
在这里,如图4所示,若将操作人员2与机器人1(电极4a、4b)的接近距离设为A,则如图5所示,该接近距离A变得越近,由电极4a、4b测量出的电压越高。因此,只要对测量器5a、5b预先设定与机器人1的各部的动作速度相应的电压的阈值,在测量器5a、5b中比较测量出的电压值和设定的阈值,将基于该比较结果的控制信号发送到控制器6即可。在图5所示的例子中,设定两个阶段的阈值V
如上所述,该对人保护装置通过由操作人员2保持的交流电压附加装置3,在操作人员2的体表附近施加绝对值比人体所具有的静电场大的正负变动的交流电场,当机器人1与操作人员2接近时,由测量器5a、5b测量设置于机器人1的电极4a、4b的电压,基于该电压值向机器人1的控制器6发送信号,控制机器人1的动作,因此与现有的使用人体通信的装置相比,最长检测距离较长,在机器人1高速动作的情况下也能够确保充分的安全性。另外,与现有的使用地面电极的装置相比,结构简单,即使机器人1的使用场所改变,也无需变更电极的形状、设置操作,能够高效地进行机器人1的移设。
在本实施方式中,将与测量器5a、5b所测量出的电压值相应的控制信号发送到控制器6,但也可以是测量器5a、5b仅将电压值信息发送到控制器6,将由控制器6接收到的电压值与设定的阈值进行比较,基于该比较结果进行机器人1的对人保护的控制。此时,在控制器6中,识别从各测量器5a、5b接收到的电压值信息,判断操作人员2从哪个方向接近机器人1的第一臂12a和第二臂12b中的哪一个,并对每个臂12a、12b进行控制即可。
另一方面,在无需精细地确定与操作人员2接近的机器人1的部位的情况下,也可以通过一个测量器测量各电极4a、4b的电压。
另外,测量器如本实施方式这样,作为带接地电极的测量器,优选能够无论机器人的设置场所如何都能稳定且高精度地进行检测动作,但在认为测量器本身和交流电压附加装置的基准电位根据机器人的设置场所没有较大差异的情况下,也可以省略接地电极而削减成本。
另外,在本实施方式中,仅在操作人员2的单臂上佩戴了交流电压附加装置3,但若这样,由于交流电压附加装置使人体带电的电压(电场强度)的单臂比另一臂高,能够进行接近检测的距离在操作人员的左右臂不同,因此在存在操作人员在身体的左右两侧接近机器人的可能性的情况下,优选在操作人员的身体的左右(例如两臂)佩戴交流电压附加装置,能够更高精度地检测操作人员与机器人的接近状况。
进一步,作为上述的第一实施方式的变形例,能够提高对由交流电压附加装置3附加的交流电压的信号叠加比其频率高的频率的信号、或者施加与信号相应的调制,来附加信号信息。作为附加的信号信息,例如列举出能够确定接近的操作人员的ID信息。而且,通过在测量器中追加滤波器,并且追加与测量器连接的接收器以及数据保存装置,也能够用滤波器分离并读取从测量器所测量的电压附加的信号信息,将该信号信息作为数据保存。若这样,在检测出机器人与操作人员接近时,通过对照保存于数据保存装置的数据,也能够实时地确定接近的操作人员,控制机器人进行与该操作人员相应的避免接触动作。
图6表示第二实施方式的对人保护装置的应用状态。在本实施方式中,在沿着横向长的操作台15交替地配置操作人员2和机器人(协作机器人)1’、左右相邻的状态下进行操作的操作现场,将各操作人员2以及各机器人1’作为应用对象。在该操作现场中,在比图6所示的虚拟线B靠左侧和靠右侧,操作工序不同。
各机器人1’相对于第一实施方式的机器人1,将第三臂12c以绕与第一臂12a相同的轴在水平面内自由转动的方式安装于各机器人1’的基座11的上部,将第四臂12d在水平面内自由转动地安装于第三臂12c的前端部。而且,虽然省略图示,但第三臂12c、第四臂12d也与第一臂12a、第二臂12d同样,分别由致动器驱动,各安装有三个电极和带接地电极的测量器。
另一方面,各操作人员2在两臂(两手腕)上各佩戴有一个交流电压附加装置3。该交流电压附加装置3的频率根据操作工序而不同,被一个工序的操作人员2与另一个工序的操作人员2夹持的位置(图6的右侧)的机器人1’进行与检测到的频率相应的避免接触动作,从而能够可靠地防止与左右任一个操作人员2的碰撞。
另外,若使各操作人员2的交流电压附加装置3的频率相互不同,则能够判定各机器人1’存在与其左右哪一侧的操作人员2接触的可能,使各机器人1’进行更适当的避免接触动作。
然而,如在第一实施方式以及第二实施方式中使用的手镯型的交流电压附加装置,如上述那样,优选在存在操作人员左右接触机器人的可能性的操作环境中佩戴于操作人员的两臂,但在该情况下佩戴个数变成多个,处理稍微复杂。
针对于此,作为交流电压附加装置,若采用如后所述能够佩戴于操作人员的头部的装置,则在操作人员的身体的左右几乎没有电场强度差,能够大致左右均等地进行接近检测,因此即使在存在操作人员左右接触机器人的可能性的操作环境中,佩戴个数为一个即可等,处理变得容易。
另外,在使用具有1/4电气长度的电极作为接地电极的情况下,若为能够佩戴于距地面距离远的操作人员的头部的方式,则特别难以受到噪声的影响。此外,1/4电气长度的接地电极的前端部越是能够配置在远离另一个电极以及操作人员的体表的位置、或者越是能够配置在接近操作人员的头顶部的位置,噪声的降低效果越高,因此优选。
以下,基于图7A、图7B、图8A、图8B以及图8C对能够佩戴于操作人员的头部的交流电压附加装置的例子进行说明。图7A、图7B表示具有帽檐的帽子型的交流电压附加装置16的例子。其中,在图7A的例子中,在帽子17的冠部(主体部)的后部的外侧面安装交流电流附加电路18,在帽子17的冠部的头顶部附近的内侧面安装薄板状的电极19。另外,1/4电气长度的接地电极20在对操作人员附加的交流电压的频率为12MHz的情况下为6~8m的长度,因此准备留下与交流电流附加电路18连接的连接部分以及前端部的约70cm而将中央部卷绕在直径12mm的树脂制筒管的部件,将该筒管卷绕部20a固定在帽子17的冠部的外侧面,将最前端的约15cm卷绕在帽子17的帽檐部。
另外,在图7B的例子中,交流电流附加电路18的安装位置与图7A相同,但通过将电极19安装于帽子17的冠部的内侧面的滑动件(发带)的位置,提高电极19与操作人员头部的密接性。另外,1/4电气长度的接地电极20将其筒管卷绕部20a与图7A相同地固定于帽子17的冠部的外侧面,并将前端部朝向距地面最远的帽子17的头顶部卷绕。
此外,为了对由汗引起的锈的措施、防止戴帽子17时受伤,电极19也可以在表面涂覆树脂。另外,如果对施加电压没有妨碍,则也可以配置在帽子17的冠部的任何地方。
图8A~图8C表示头盔型的交流电压附加装置21的例子。其中,在图8A、图8B的例子中,在帽体22的后部的外侧面安装有交流电流附加电路23,在设置于帽体22内的吊网24的头顶部附近的内侧面安装电极25。另外,1/4电气长度的接地电极26将其筒管卷绕部26a固定于帽体22的外侧面,将前端部朝向帽体22的头顶部卷绕。
这样,在头盔型的交流电压附加装置21中,即使将电极25和接地电极26的前端部均设置于帽体22的头顶部附近,由于在两者之间设置吊网24、吸收冲击内衬27而确保充分的距离,因此噪声的影响也较小。
另外,在图8C的例子中,电极25的安装位置与图8A、图8B相同,但将交流电流附加电路23以及接地电极26的筒管卷绕部26a的安装位置向比图8A、图8B靠帽体22的头顶部侧移动,并将接地电极26的前端配置在帽体22的帽檐部而扩大与电极25之间的距离,从而进一步减小噪声的影响。
图9表示第三实施方式的对人保护装置的应用状态。本实施方式与图6所示的第二实施方式相同,将操作现场的操作人员2和机器人1’作为应用对象,使各操作人员2佩戴图8A、图8B所示的头盔型的交流电压附加装置21。
而且,将各操作人员2的交流电压附加装置21的频率分别设为不同的值,在测量器侧使用频率分析测量每个频率的电压,将根据所测定的电压中最大的电压值控制机器人1’的动作的控制信号向机器人1’的控制装置发送,从而各机器人1’进行与检测到的频率相应的避免接触动作。
此时,由于使对各操作人员2附加的交流电压的频率各不相同,因此无论机器人1’和操作人员2的配置如何,都能够将在机器人1’的电极检测的电压值抑制在适当的范围内。
应当认为本次公开的实施方式在所有的点是例示,并非是限制性的内容。本发明的范围并非通过上述的说明来表示,而是通过权利要求书来表示,意在包括与权利要求书等同的意思以及在其范围内的所有变更。
例如,交流电压附加装置除了在实施方式中说明的手镯型、帽子型或者头盔型之外,也可以形成为卡片状并安装在操作人员的身体的任意位置(例如,工作服、皮带等)。另外,电极通常粘贴在机器人的臂等动作部,但也可以将机器人主体本身作为电极。
此外,本发明能够特别有效地应用于作为对象的机器人是上述的各实施方式那样的协作机器人的情况,但也可以应用于现有的工业用机器人和进行其调整操作、维护等的操作人员,防止操作人员在机器人的周围进行操作时的碰撞。
附图标记说明
1、1’…机器人(协作机器人);2…操作人员;3、16、21…交流电压附加装置;4、4a、4b…(机器人的)电极;5、5a、5b…测量器;6…控制器;7…(测量器的)接地电极;10…机器人主体;12a、12b、12c、12d…臂;17…帽子;18、23、31…交流电流附加电路;19、25、32…(交流电压附加装置的)电极;20、26、33…(交流电压附加装置的)接地电极;22…帽体。
- 一种外挂式机器人保护装置、机器人测试治具和机器人
- 一种停车机器人叉臂的保护装置及停车机器人