水下推进器的驱动器装置
文献发布时间:2023-06-19 09:58:59
技术领域
本发明涉及深海水下操作机器人,尤其涉及水下操作机器人的推进器的驱 动器装置。
背景技术
遥控水下机器人(ROV)是当今人类探索海洋环境和开发海洋资源的有力 工具。相较于传统的液压型ROV,电动ROV具有较多的优势,例如系统重量 和尺寸小,有效减小船舶甲板LARS系统的功率和尺寸;易于集成组转和拆卸, 便于移动和运输;操控性能优,操作简单,有效提高水下工作能力,减小维护 人工成本;油污泄漏风险小,更有利于环境保护和法规评估;更易于集成导航、 控制、作业等智能化功能,具备向AUV升级的技术基础。总之,更低的维护 成本、更高的可靠性和效率、更细和便宜的脐带缆以及更小的环境污染风险等优势,使电动ROV成为下一代ROV技术的发展方向。
随着应用领域的不断扩大,ROV也向着连续工作时间越长、操控机动性 越灵活、推进动力越大的方向发展。作为电动ROV的动力部分,为水下机器 人的正常作业提供稳定、强大的动力保证,对于深海工作机器人的应用具有重 要的意义。
发明内容
以下给出一个或多个方面的简要概述以提供对这些方面的基本理解。此概 述不是所有构想到的方面的详尽综览,并且既非旨在指认出所有方面的关键性 或决定性要素亦非试图界定任何或所有方面的范围。其唯一的目的是要以简化 形式给出一个或多个方面的一些概念以为稍后给出的更加详细的描述之序。
根据本发明的一方面,提供了一种用于水下推进器的驱动器装置,包括:
主功率板,该主功率板包括基板,该基板上设有多个接线柱和多个碳化硅 功率组件;
主电路连接板,设于该主功率板的上方并集成输入端的正负母线以及输出 端的交流母线,该主电路板上设有与该多个接线柱对应的多个接线端子,该多 个接线柱支撑该主电路连接板并与该主电路连接板上的该多个接线端子相接, 该主电路连接板上设有针孔以与该多个碳化硅功率组件的针脚焊接固定;
多个驱动芯片组件,设置于该主电路连接板上,每个驱动芯片组件包括两 个驱动器芯片,用于控制两个对应的碳化硅功率组件,每个驱动功率组件上设 有针孔以与对应的碳化硅功率组件的针脚焊接固定;以及
主控板,位于该主电路连接板的上方,该主控板上包括数字信号处理芯片, 且该主控板与该多个驱动芯片组件通过管脚焊接联通以构成控制电路。
在一实例中,每个该碳化硅功率组件包括通过定位板定位在该基板上的两 个碳化硅分立器件,碳化硅分立器件的底部用陶瓷片隔离,并在上部用压片压 紧。
在一实例中,该多个碳化硅功率组件的数目为6个,该驱动芯片组件的数 目为3个,每个驱动芯片组件用于控制两组该碳化硅功率组件以构成一个单项 电路,以最终获得三相电路。
在一实例中,该接线柱采用绝缘材料与螺杆浇注而成。
在一实例中,该主功率板上还包括测温组件,该测温组件位于两组该碳化 硅功率组件之间以用于测量功率组件温度并传递至该主控板,该测温组件通过 螺栓固定在该基板上。
在一实例中,该主电路连接板上配置有直流侧支撑电容和采样电阻以用于 直流侧电路相关技术参数的测量与保护,以及配置有两个电流传感器以用于输 出侧交流电流采集。
在一实例中,该基板包括铝合金基板。
在一实例中,该主电路连接板采用多层PCB和低感母排压制而成。
在一实例中,该低感母排的叠层采用黏胶热压成型。
在一实例中,该主功率板上设有槽口以用于在安装至电机的状态下与电机 舱体内的油路进行连通。
在一实例中,该主控板的一侧配置有电源接口和信号接口。
在一实例中,该驱动器装置还包括罩住该主功率板、该主电路连接板和该 主控板的外壳,该外壳与该主功率板的基板通过螺栓固定。
附图说明
在结合以下附图阅读本公开的实施例的详细描述之后,能够更好地理解本 发明的上述特征和优点。在附图中,各组件不一定是按比例绘制,并且具有类 似的相关特性或特征的组件可能具有相同或相近的附图标记。
图1A是示出了根据本发明的一方面的集成化的水下推进器的正面示意 图;
图1B是示出了根据本发明的一方面的集成化的水下推进器的仰视投影示 意图;
图1C是示出了根据本发明的一方面的集成化的水下推进器的俯视投影示 意图;
图1D是示出了根据本发明的一方面的集成化的水下推进器的右视投影示 意图;
图1E是示出了根据本发明的一方面的集成化的水下推进器的左视投影示 意图;
图2是示出了根据本发明的一方面的集成化的水下推进器的正面剖视图;
图3是示出了根据本发明的一方面的集成化的水下推进器的内腔的示意 图;
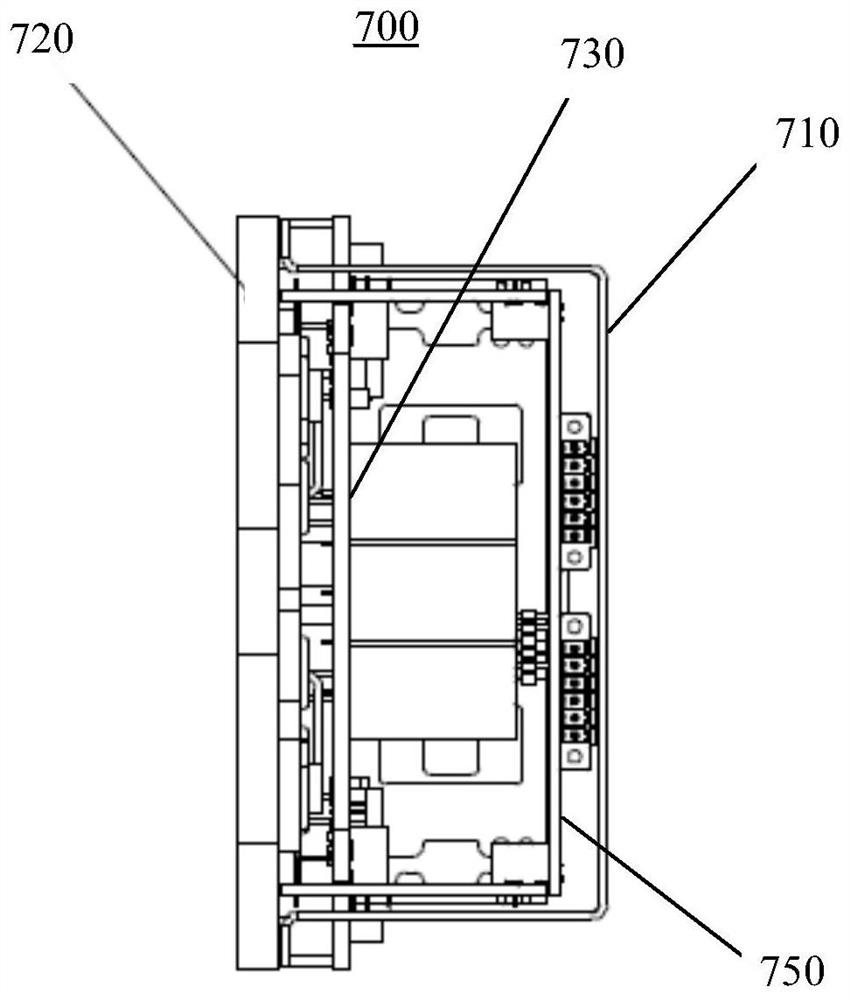
图4A是示出了根据本发明的一方面的驱动器装置的侧面的示意图;
图4B是示出了根据本发明的一方面的驱动器装置的正面的示意图;
图4C是示出了根据本发明的一方面的驱动器装置的主功率板的示意图;
图4D是示出了根据本发明的一方面的驱动器装置的主电路连接板的示意 图;
图4E是示出了根据本发明的一方面的驱动器装置的主控板的示意图,以 及
图4F是示出了根据本发明的一方面的驱动器装置的另一侧面的示意图。
符号说明:
1000:集成推进器
100:永磁同步电机
110:端部轴承
120:传动轴
130:永磁同步电机转子
140:永磁同步电机定子
150:中间支撑轴承
200:磁齿轮机构
210:转子固定轴承
220:磁齿轮高速转子
230:齿轮轴
240:极片定子
250:磁齿轮外磁体转子
260:输出传动轴
270:前端轴承
280:轴套端盖
300:螺旋桨机构
310:叶轮
320:锁紧盖帽
330:导流罩
400:驱动器组件
410:驱动器外壳
420:盖板
430:充水口
440:充油口
450:充油舱泄压阀
460:充水舱泄压阀
470:水密插头
500、600:压力平衡器
510、610:压力平衡器外壳
511、611:通孔
520、620:活塞盘
521、612:导向柱
530、630:伸缩弹簧
540、640:橡胶隔膜
700:驱动器装置
710:防护外壳
720:主功率板
721:基板
722:接线柱
723:测温组件
724:碳化硅功率组件
7241:碳化硅分立器件
7242:定位板
7243:压片
725:方形槽口
730:主电路连接板
731:接线端子
732:支撑电容
733:采样电阻
734:电流传感器
740:驱动芯片组件
750:主控板
751:DSP芯片
752:电源接口
753:信号接口
具体实施方式
以下结合附图和具体实施例对本发明作详细描述。注意,以下结合附图和 具体实施例描述的诸方面仅是示例性的,而不应被理解为对本发明的保护范围 进行任何限制。
根据本发明的一方面,提供了一种水下集成推进器1000,如图1A所示, 推进器1000主要部件可包括永磁同步电机100、磁齿轮机构200、螺旋桨机构 300、电机驱动器组件400。以下结合图1A-1E以及图2、图3对本案的推进器 1000进行描述。
如图所示,永磁同步电机100设置于电机外壳内,磁齿轮机构200沿轴向 一端与永磁同步电机100的一端轴向连接,磁齿轮机构200并设置于磁齿轮外 壳内,电机外壳与磁齿轮外壳之间采用法兰盘对接,通过内六角不锈钢螺栓连 接紧固。
螺旋桨机构300可与磁齿轮机构200的另一端轴向连接,磁齿轮机构200 可用于将永磁同步电机100的动力传递至螺旋桨机构。
驱动器组件400可连接至永磁同步电机100和磁齿轮机构200的侧端,从 图1A中看,驱动器组件400连接至永磁同步电机100和磁齿轮200机构的下 方一侧。驱动器组件可设置于驱动器外壳内,驱动器外壳与电机外壳和磁齿轮 外壳采用法兰盘对接,也通过内六角不锈钢螺栓连接紧固。
本案中,所有部件的外壳均采用铝合金制造,外表进行阳极氧化(黑色) 处理,具备抗盐雾腐蚀,海水腐蚀的能力。驱动器组件400的部件外壳上有一 个盖板420,其周围有4颗紧固螺栓,此部位用于和水下机器人的主框架进行 连接。
永磁同步电机100可包含端部轴承110、传动轴120、永磁同步电机转子 130、永磁同步电机定子140和中间支撑轴承150。端部轴承110和中间支撑轴 承150固定在壳体内,与传动轴120采用机械过盈配合,确保传动轴120能够 自由转动。永磁同步电机转子130可与传动轴120通过齿轮啮合。
永磁同步电机定子140可与铝合金外壳固定,永磁同步电机定子140上面 有铜丝绕组,最终引出三相电源线,可以连接至驱动器组件400。永磁同步电 机100的定子140可通过驱动器组件400通以三相交流电压,即可驱动永磁同 步电机转子130旋转。
磁齿轮机构200主要可包含转子固定轴承210、磁齿轮高速转子220、齿 轮轴230、极片定子240、磁齿轮外磁体转子250、输出传动轴260、前端轴承 270和轴套端盖280。
磁齿轮高速转子220可与齿轮轴230固定一体,齿轮轴230又可与传动轴 120通过齿轮啮合,从而将永磁同步电机100的动力传递至磁齿轮机构200。 极片定子240可通过螺栓与磁齿轮外壳固定。通过磁场作用,极片定子240可 将磁齿轮高速转子220的转速传递至磁齿轮外磁体转子250,使磁齿轮外磁体 转子250随磁齿轮高速转子220的旋转而旋转。
磁齿轮外磁体转子250的一端与转子固定轴承210的外圈采用过盈配合, 转子固定轴承210又可与铝合金外壳固定。输出传动轴260的一端与磁齿轮外 磁体转子250可通过齿轮啮合,另一端可与前端轴承270的内圈采用过盈配合, 并伸出外壳,其前端与外壳之间安装有轴套端盖280。
螺旋桨机构300可主要包含叶轮310、锁紧盖帽320和导流罩330三个部 分。叶轮310可采用铝合金材质,耐腐蚀并且重量小。输出传动轴260连接至 叶轮310,从而将动力最终传递至叶轮310。
输出传动轴260与叶轮310连接的位置可以为锥体状,轴体上的键与叶轮 310上的键槽可采用过盈配合进行限位。在输出传动轴260端部可设有螺纹, 通过防松螺母可将叶轮310固定,稳定可靠。此外,在叶轮310的前端可设有 锁紧盖帽320,通过螺栓与叶轮310相连接。更具体地,在锁紧盖帽320的中 心配置有螺栓孔,通过螺栓再将叶轮310与输出传动轴260端面的内螺纹孔进 行紧固。由此采用双定位方式,以确保叶轮310在水下转动时不会有松动现象。
倒流罩330可采用环氧树脂浇注而成,在其上部加工出一个平面,内部嵌 装螺母,然后与驱动器组件400的外壳伸出段通过螺栓紧固,进水口侧为大喇 叭口,可以将水流聚拢,形成均匀的流场,减少叶片转动的水流阻力,从而产 生更大的推进力。
根据本发明的一方面,电机外壳的内腔、驱动器外壳的内腔以及磁齿轮外 壳的内腔的一部分构成充油舱,磁齿轮外壳的内腔的另一部分构成充水舱,如 图3所示。此外,水下推进器1000还设置了压力平衡器500和压力平衡器600。
本发明的集成推进器装置采用专用的压力补偿装置,无需连接外部油路, 可以满足深海环境的应用,并且能够有效避免漏油的风险。
压力平衡器500的内腔可与充油舱在空间上连通,且平衡器外壳510的腔 内设有可活动的活塞盘520,活塞盘520的底部可设有橡胶隔膜540以使压力 平衡器500的内腔与充油舱之间流体地密封隔断。这里“流体地密封隔断”是 指充油舱与压力平衡器500的内腔之间不会发生流体例如油的泄露。
压力平衡器500的内腔通过平衡器外壳510上的通孔511与外部连通,活 塞盘520与压力平衡器500的外壳间设有伸缩弹簧530,活塞盘520可在两侧 的压力和伸缩弹簧530的弹簧力的作用下保持平衡。
类似地,压力平衡器600的内腔与充水舱在空间上连通,且平衡器外壳 610的腔内设有可活动的活塞盘620,活塞盘620的底部设有橡胶隔膜640以 使压力平衡器600的内腔与充水舱之间流体地密封隔断。
压力平衡器600的内腔通过平衡器外壳610上的通孔611与外部连通,活 塞盘620与平衡器外壳610之间设有伸缩弹簧630,活塞盘620可在两侧的压 力和伸缩弹簧630的弹簧力的作用下保持平衡。
在如图2所示的实施例中,驱动器组件400可容纳在驱动器外壳410的腔 内。驱动器外壳410采用铝合金材料,和永磁同步电机100、磁齿轮机构200 的外壳由接触法兰盘对接,中间夹有密封圈,外部通过10个内六角螺栓紧固, 能够防水并且抗振。在驱动器外壳410的底部(以图中视角而言)设置有盖板 420,采用螺栓紧固并配合O型密封圈的使用,能够有效的达到防水性能。
驱动器组件400安装在驱动器外壳410内部,由驱动器组件400的基板与 驱动器外壳410内的顶部(以图中视角而言)平面相接触,并且通过6个螺栓 与其紧固,确保基板能够通过驱动器外壳410进行散热。
驱动器外壳410顶部(以图中视角而言,即靠近电机和磁齿轮一侧)开有 电缆口,可以将永磁同步电机100的动力电缆以及磁齿轮机构200部分的控制 电缆连接到驱动器组件400上。在驱动器外壳410的一端设置有水密插头470, 此部件可采用2芯主电路接头和多芯控制电路接头,2芯主电路接头主要用于 为驱动器组件400提供直流电源,用以供驱动器组件400将直流转换为交流三 相电源驱动永磁同步电机100工作。多芯控制电路接头主要用于上层控制器对 驱动器组件400发出指令信号和下层各部件的状态及信号反馈。在驱动器外壳 410上可以选择配置1-2个水密插头470,只需要替换标准的安装件即可。由 于采用采用一体化外壳设计,只需要一个水密插头即可进行电路系统与控制系 统的连接,组装方便、快捷。
在如图所示的示例中,磁齿轮机构200中的极片定子240将磁齿轮腔体分 成2个腔体,对接电机一端的部分为充油腔体,与永磁同步电机100的腔体连 通,对接螺旋桨300一端的部分为充水腔体,充水腔体内主要包含磁齿轮外磁 体转子250、输出传动轴260、前端轴承270。
在一实例中,压力平衡器500的外壳510可与永磁同步电机100的外壳采 用法兰盘对接,对接处配置有密封圈,外部通过螺栓紧固连接。在平衡器外壳 510的端部设置有导向孔,活塞盘520上设有导向柱521,导向柱521上套有 伸缩弹簧530并与伸缩弹簧530一起容纳于导向孔中。活塞盘520底部配置有 橡胶隔膜540,通过法兰盘与平衡器外壳510内侧法兰盘对接并通过螺栓连接 紧固,以此可以将压力平衡器500的内部通过橡胶隔膜540分成2个空间。
在一实例中,压力平衡器600的外壳610可设置于驱动器外壳410的一端。 在平衡器外壳610的端部设置有往腔内延伸的导向柱612,伸缩弹簧630的一 部分套在导向柱612上,另一部分伸进活塞盘620的凹陷部,活塞盘620可在 导向柱轴向上左右移动。活塞盘620底部配置有橡胶隔膜640,以此可以将压 力平衡器600的内部通过橡胶隔膜640分成2个空间。
驱动器外壳410上开有连通至充油舱的充油口440和连通至充水舱的充水 口430,以及连通至充油舱的充油舱泄压阀450和连通至充水舱的充水舱泄压 阀460,以用于在往充油舱和充水舱分别充油和充水时泄压。
当设备组装完成后,将绝缘油通过充油口440注入腔体内,会形成一个充 油舱,充油的过程中可以施加一定的压力,例如0.3-0.6MPa。这样有三个作用, 一是可以通过调节充油舱泄压阀450来进行腔体内气体排放,确保腔体内充满 油;二是可以迫使压力平衡器500的伸缩弹簧530有一定的压缩,当设备在深 海中应用时,平衡器外壳510上的通孔511可以让海水进入,随着下潜的深度 增加,伸缩弹簧530能够感知海水的压力,迫使活塞盘520带动橡胶隔膜540 向充油舱一侧运动,压缩充油舱的体积来确保电机一体外壳能够不承受海水压 强。平衡后充油舱内只会承受比充油时施加压力稍低的压力,例如小于 0.3-0.6MPa。此外在设备整个下潜和上浮过程中,充油舱的压力总是会比海水 的压力大,这样可以确保海水不能够进入充油舱,避免海水造成电气部件的损 坏。也可以提高电机的可靠性。
此外,当设备组装完成后,将纯净水通过充水口430注入腔体内,会形成 一个充水舱,充水的过程中可以施加一定的压力,例如0.3-0.6MPa,但要小于 充油舱的压力值。
压力平衡器600的工作原理压力平衡器500类似,在设备整个下潜和上浮 过程中,充水舱的压力总是会比海水的压力大,但是比充油舱的压力小,这样 可以确保水不能够进入充油舱,海水也不能够进入充水舱,由于充水舱的端部 连接有输出轴,就会有动密封的需要,当动密封失效时,海水即便进入了充水 舱,也不会影响设备的正常工作,这样将会大幅度提升电机的可靠性,降低水 下机器人的运行成本。
本发明的集成推进器装置采用的驱动器具备承受65MPa压强能力,安装 在电机一体外壳中,并且浸入绝缘油中,能够有效提升水下电驱动器的功率等 级。此外采用内部充油的方式,可以有效起到绝缘、润滑、散热、压力平衡的 作用。
本案的推进器采用电机驱动器和电机一体化设计,控制和驱动一体化,操 控灵活,并且能够有效减少水下连接电缆的使用,减少承压电子舱的体积,总 体降低水下机器人的成本。
本发明还提供了一种用于推进器的驱动器装置,整体结构采用模块化设 计。驱动器装置700主要部件可包括防护外壳710、主功率板720、主电路连 接板730、驱动芯片组件740、主控板750。驱动器装置结构上采用多个PCB 板搭接而成,最底层为主功率板720,其上层为主电路连接板730,在其周围3 个边布局3个驱动芯片组件740,顶部则是主控板750,各部件之间通过器件 管脚相互焊接而成,连成一套电路系统,能有效提升装置的功率密度及可靠性。 在所有部件的外部设计有防护外壳710,该防护外壳710可与主功率板720的 基板721通过螺栓连接而成,其对电子器件起到防护作用,并且对控制电路有 良好的电磁屏蔽作用。
以下结合图4A-4F对驱动器装置700进行描述。这里的驱动器装置700 可对应先前一体化推进器中的驱动器组件。
主功率板720可包括基板721、接线柱722、测温组件723、碳化硅功率 组件724。基板721可以是铝合金基板,作为整个驱动器装置的基座。铝合金 基板有利于驱动器装置的安装,同时能够有效解决功率器件的散热问题。
六组碳化硅功率组件724可与基板721通过螺栓连接,每个碳化硅功率组 件724配置有两个碳化硅分立器件7241、定位板7242、陶瓷片和压片7243。 两个碳化硅分立器件7241通过定位板7242限制位移,底部用陶瓷片隔离,并 在器件上部用压片7243压紧,确保器件与基板的紧密贴合。陶瓷片具有良好 的导热及绝缘能力,能够有效保证碳化硅器件的散热及可靠性。本发明的电机 驱动器装置采用碳化硅分立器件,可以有效提升装置的功率密度。
测温组件723可通过螺栓固定在铝合金基板721上,其位置可处于两组碳 化硅功率组件724之间,可实时测量功率组件的温度并传到主控板750上进行 监测。铝合金基板721上对应位置开有例如U型槽口,U型槽口主要用于给连 接电缆让位。
在本案中,基板721上还可设有方形槽口725,以用于本驱动器装置在电 机一体外壳内安装后与电机舱体内油路的联通。此功能可以确保驱动器装置舱 室内的压力与海水压力平衡,也可以用于绝缘油的循环从而辅助驱动器装置的 散热。铝合金基板与电机一体外壳传导散热和利用绝缘油与电机一体外壳进行 热传导两种散热模式,能够更加有效保证驱动器装置的可靠性。
接线柱722可采用绝缘材料与螺杆浇注而成,一端可以与铝合金基板721 固定,另一端可以作为主电路的接线端,结构简易,安全可靠。
主电路连接板730主要用来连接主电路,即正负直流电源输入母线和三相 交流电输出母线。主电路连接板730可采用多层PCB和低感母排压制而成,集 成了输入端的正负母线以及输出端的U/V/W三相母线,叠层母排采用黏胶热 压成型,可以使绝缘层和铜板完全贴合,没有气隙,从而能有效降低局部放电 的发生率。此外,采用PCB板材料封装可以大大降低爬电击穿的威胁,提高层 间的绝缘性能。
各接线端子731分别位于主电路板的不同位置,易于区分,端口均为裸露 的镀锡铜板,光滑平整,便于接线端子的搭接。主电路连接板730上配置有直 流侧支撑电容732和采样电阻733以用于直流侧电路相关技术参数的测量与保 护。此外,主电路连接板730可配置有两个电流传感器734,主要用于输出侧 交流电流采集。主电路连接板730上设有针孔以与碳化硅功率组件724的针脚 焊接固定,从而搭建完整的主电路。根据本案配置的主电路连接板730可具有 低阻抗,抗干扰能力强,可靠性好的优点。
驱动芯片组件740可用于控制碳化硅功率组件724,可采用PCB板制作 而成。每个驱动器芯片组件740可配置有两个驱动器芯片,每个芯片配套有相 应的检测及保护电路。根据现有装置的设计,每个驱动芯片组件740可以控制 两组碳化硅功率组件724,以此搭建成一个单相电路。图4D中示出了沿周边 设置的三套驱动芯片组件740以构成三相电路。每个驱动芯片组件740可设计 有针孔以与对应的碳化硅功率组件724的针脚焊接固定,从而搭建完整的驱动 电路。驱动芯片组件740装配简单,拥有较高的系统集成度。
主控板750主要用于整个装置的信号传输,信号采集,开断指令的下达, 故障反馈。主控板750可包括DSP芯片751,用来型号处理分析,编程计算, 具有非常高的集成度,并且稳定性好,精度高。在主控板750的一侧配置有电 源接口752,主要用于主控板750的电源输入,并且通过主控板750为驱动芯 片组件740提供电源。主控板750的一侧还配置有信号接口753,主要用于主 控板750的各种信号的传输,能够从上层控制接收指令并反馈装置的各类状态 信息。主控板750可与三个驱动芯片组件740通过管脚焊接联通,搭建成完整 的控制电路,其亦是采用PCB板制作,具有高集成度。
提供对本公开的先前描述是为使得本领域任何技术人员皆能够制作或使 用本公开。对本公开的各种修改对本领域技术人员来说都将是显而易见的,且 本文中所定义的普适原理可被应用到其他变体而不会脱离本公开的精神或范 围。由此,本公开并非旨在被限定于本文中所描述的示例和设计,而是应被授 予与本文中所公开的原理和新颖性特征相一致的最广范围。
- 水下推进器的驱动器装置
- 应用于水下的导流罩端盖、水下推进器及水下移动装置