一种公路隧道运营安全风险模拟评估系统及其方法
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及隧道安全领域,尤其涉及一种公路隧道运营安全风险模拟评估系统及其方法。
背景技术
行车安全已经成为公路隧道运营的核心问题,近年来发生多起隧道安全事故,造成了巨大的经济损失和严重的社会影响,尤其对于高速公路隧道影响更为严重,但是由于隧道内行车环境复杂、光线的影响以及其他因素的影响,将严重影响隧道运营行车安全,其中,在其他因素中,隧道内的交通流量是造成行车危险的重要因素之一,在隧道内如果交通量大、重车比例高,会对行驶安全造成严重的影响。目前,对于隧道的交通流量主要依靠车检器等传感器监测,但针对隧道内的交通流量对隧道行车的影响并没有准确的评价方法,从而不能对隧道内不同交通流量条件下隧道内的安全行车作出一个正确的指导措施,但是也有通过纯理论的数学模型对隧道内不同交通流量下的行车安全性进行评估,但是缺乏现场实证,同样不能够作出准确的指导措施。
为了解决上述技术问题,继续提出一种新的技术手段加以解决。
发明内容
本发明的目的是提供一种公路隧道运营安全风险模拟评估系统及其方法,能够对公路隧道的行车环境进行准确模拟,而且能够对驾驶员在场景中的驾驶行为进行准确监测,并通过驾驶员的行为对隧道的行车安全进行准确评估,无需到实际运营的隧道中对不同车流量环境进行直接测试,大大减少了人力和物力成本,提高了测试的准确性。
本发明提供的一种公路隧道运营安全风险模拟评估系统,包括模拟驾驶系统、用于采集驾驶员行为的检测单元、隧道环境模拟单元以及控制处理单元;
模拟驾驶系统,用于驾驶员进行模拟驾驶;
隧道环境模拟单元,用于接收控制处理单元输出控制命令模拟隧道内的环境;
检测单元,用于检测驾驶员在模拟驾驶系统内进行模拟驾驶时的驾驶行为参数以及车辆状态参数;
控制处理单元,用于接收检测单元输出的检测参数并进行行车安全评估。
进一步,所述隧道环境模拟单元立体显示器以及六自由度运动平台;其中,模拟驾驶系统设置于六自由度运动平台上;
所述LED驱动电路的输出端与L所述六自由度运动平台控制端与控制处理单元的控制输出端连接,所述立体显示器与控制处理单元的输出端连接。
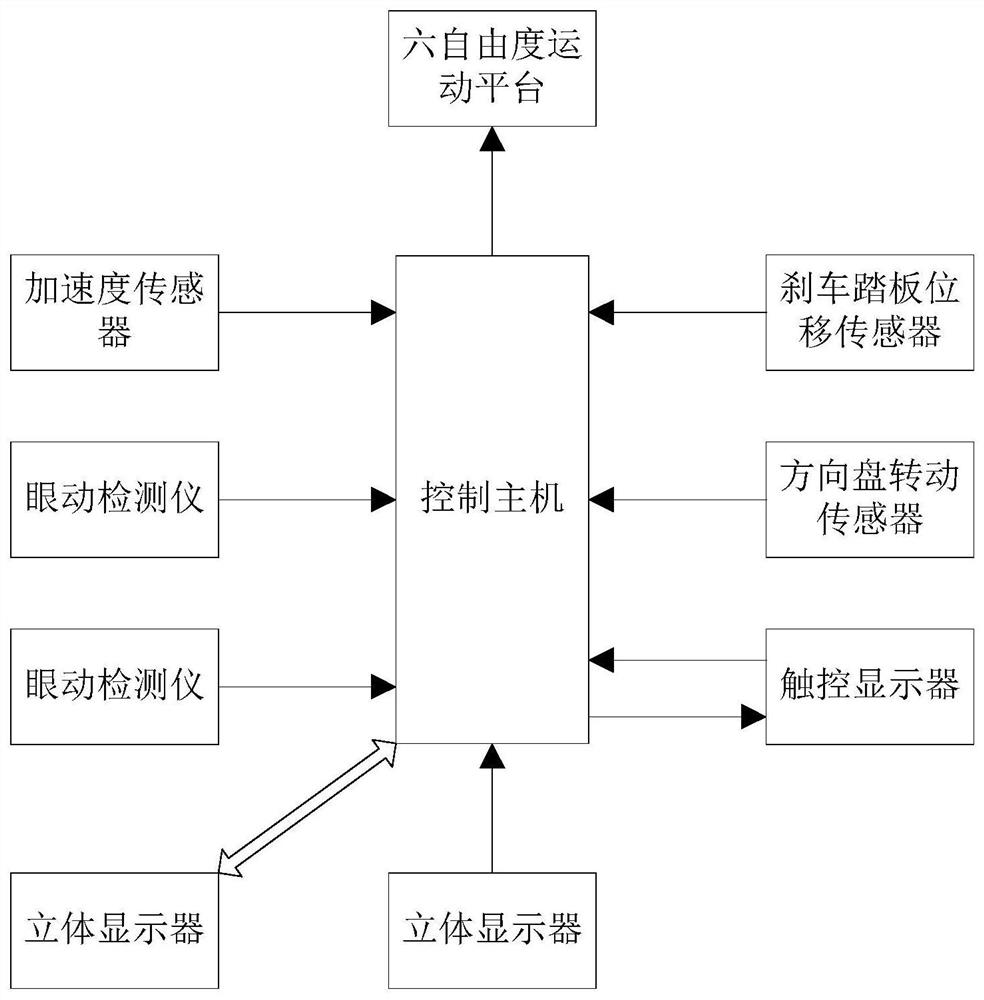
进一步,所述检测单元包括眼动检测仪、加速度传感器、刹车踏板位移传感器以及方向盘转动传感器;所述眼动检测仪、加速度传感器、刹车踏板位移传感器以及方向盘转动传感器的输出端与控制处理单元连接。
进一步,所述眼动检测仪检测参数包括驾驶员注视持续时间、注视时间百分比、平均注视时间、注视次数百分比、眼睛扫描平均速度和通孔面积大小。
进一步,所述控制处理单元包括控制主机、触控显示器、存储器;
所述控制主机与触控显示器和存储器通信连接,所述控制主机信号输入端与检测单元的输出端连接,控制主机向LED驱动电路、立体显示器以及六自由度运动平台输出控制信息。
相应地,本发明还提供了一种基于上述系统的运营安全评估方法,包括:
S1.由控制主机向隧道模拟系统输出控制命令,由立体显示器对隧道内的不同交通状态进行模拟,其中交通状态包括畅通、缓行、拥堵和严重拥堵;
S2.控制主机控制立体显示器模拟隧道内不同的可见度状态;
S3.驾驶员通过模拟驾驶系统执行驾驶行为,并由检测单元检测驾驶员驾驶过程中的参数;
S4.控制主机根据驾驶员参数中的加速度参数、刹车踏板位移信息以及方向盘的转动角度参数控制六自由度运动平台动作模拟真实驾驶中的车辆动作;
S5.在驾驶员驾驶过程中监测驾驶员的眼动参数,包括驾驶员注视持续时间、注视时间百分比、平均注视时间、注视次数百分比、眼睛扫描平均速度和通孔面积大小;
S6.控制主机根据驾驶员的眼动参数判断隧道的行车安全。
进一步,步骤S6中具体包括:
统计眼动参数中各参数的变化率;
计算行车安全状态指标P:
将行车安全指标P为与设定阈值区间进行比较,如果行车安全指标P处在对应的阈值区间,则为当前的行车安全状态;
其中,行车安全状态包括良好、一般、较差和很差四个状态。
本发明的有益效果:通过本发明,能够对公路隧道的行车环境进行准确模拟,而且能够对驾驶员在场景中的驾驶行为进行准确监测,并通过驾驶员的行为对隧道的行车安全进行准确评估,无需到实际运营的隧道中对不同车流量环境进行直接测试,大大减少了人力和物力成本,提高了测试的准确性。
附图说明
下面结合附图和实施例对本发明作进一步描述:
图1为本发明的结构示意图。
图2为本发明的流程图。
具体实施方式
以下结合说明书附图对本发明做出进一步详细说明:
本发明提供的一种公路隧道运营安全风险模拟评估系统,包括模拟驾驶系统、用于采集驾驶员行为的检测单元、隧道环境模拟单元以及控制处理单元;
模拟驾驶系统,用于驾驶员进行模拟驾驶;其中,模拟驾驶系统用于模拟车辆的真实驾驶操作,包括方向盘、油门踏板、制动踏板、驻车操作机构等,此属于现有技术;
隧道环境模拟单元,用于接收控制处理单元输出控制命令模拟隧道内的环境;
检测单元,用于检测驾驶员在模拟驾驶系统内进行模拟驾驶时的驾驶行为参数以及车辆状态参数;
控制处理单元,用于接收检测单元输出的检测参数并进行行车安全评估;通过上述系统,能够对公路隧道的行车环境进行准确模拟,而且能够对驾驶员在场景中的驾驶行为进行准确监测,并通过驾驶员的行为对隧道的行车安全进行准确评估,无需到实际运营的隧道中对不同车流量环境进行直接测试,大大减少了人力和物力成本,提高了测试的准确性。
本实施例中,所述隧道环境模拟单元立体显示器以及六自由度运动平台;其中,模拟驾驶系统设置于六自由度运动平台上;
所述LED驱动电路的输出端与L所述六自由度运动平台控制端与控制处理单元的控制输出端连接,所述立体显示器与控制处理单元的输出端连接,通过上述结构,能够模拟真实的驾驶环境,控制主机通过立体显示器来模拟不同的交通流量状态以及不同的能见度状态。
本实施例中,所述检测单元包括眼动检测仪、加速度传感器、刹车踏板位移传感器以及方向盘转动传感器(用于检测方向盘的转动量,采用现有的角度传感器);所述眼动检测仪、加速度传感器、刹车踏板位移传感器以及方向盘转动传感器的输出端与控制处理单元连接,通过上述结构,能够准确检测驾驶员在驾驶过程中的行为,其中,眼动信息能够反映驾驶员对行车安全的判断,并且反馈到具体的操作动作,而加速度、刹车、方向盘转动用于控制六自由度运动平台动作来还原真实的车辆动作状态,而车辆的动作状态又会反馈到眼动参数上,因此,通过眼动参数就能够评价当前的行车安全。
其中,所述眼动检测仪检测参数包括驾驶员注视持续时间、注视时间百分比、平均注视时间、注视次数百分比、眼睛扫描平均速度和通孔面积大小。
本实施例中,所述控制处理单元包括控制主机、触控显示器、存储器;
所述控制主机与触控显示器和存储器通信连接,所述控制主机信号输入端与检测单元的输出端连接,控制主机向LED驱动电路、立体显示器以及六自由度运动平台输出控制信息,上述结构利于测试工作人员进行数据监测,包括通过触控显示器输入不同的控制命令,模拟不同交通量、不同的隧道环境,通过触控显示器展示不同交通量、不同隧道环境下的操作行为。
相应地,本发明还提供了一种基于上述系统的运营安全评估方法,包括:
S1.由控制主机向隧道模拟系统输出控制命令,由立体显示器对隧道内的不同交通状态进行模拟,其中交通状态包括畅通、缓行、拥堵和严重拥堵;
S2.控制主机控制立体显示器模拟隧道内不同的可见度状态;
S3.驾驶员通过模拟驾驶系统执行驾驶行为,并由检测单元检测驾驶员驾驶过程中的参数;
S4.控制主机根据驾驶员参数中的加速度参数、刹车踏板位移信息以及方向盘的转动角度参数控制六自由度运动平台动作模拟真实驾驶中的车辆动作;
S5.在驾驶员驾驶过程中监测驾驶员的眼动参数,包括驾驶员注视持续时间、注视时间百分比、平均注视时间、注视次数百分比、眼睛扫描平均速度和通孔面积大小;
S6.控制主机根据驾驶员的眼动参数判断隧道的行车安全,通过上述方法,能够对公路隧道的行车环境进行准确模拟,而且能够对驾驶员在场景中的驾驶行为进行准确监测,并通过驾驶员的行为对隧道的行车安全进行准确评估,无需到实际运营的隧道中对不同车流量环境进行直接测试,大大减少了人力和物力成本,提高了测试的准确性。
具体地,步骤S6中具体包括:
统计眼动参数中各参数的变化率;
计算行车安全状态指标P:
将行车安全指标P为与设定阈值区间进行比较,如果行车安全指标P处在对应的阈值区间,则为当前的行车安全状态;
其中,行车安全状态包括良好、一般、较差和很差四个状态,行车安全状态的四个等级对应于不同的交流量,即不同交通流量下,均具有四个行车安全状态。
最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
- 一种公路隧道运营安全风险模拟评估系统及其方法
- 一种下沉式公路隧道运营风险动态评估系统