一种多视子空间聚类方法及装置
文献发布时间:2023-06-19 10:00:31
技术领域
本发明涉及图像处理的技术领域,尤其涉及一种多视子空间聚类方法,以及一种多视子空间聚类装置。
背景技术
多视数据是指由多个不同视角的数据特征描述同一样本。在很多实际应用中,多视数据变得越来越普遍。例如,对于视频监控系统,多摄像机系统从多个角度记录人类的活动;互联网网络新闻包括文本、图像和语音视频等;对于图像数据,可以使用不同的特征描述图像,例如,SIFT特征、LBP特征、HOG特征等。多视数据从不同角度描述同一样本,可以提供互补信息。聚类分析是重要的数据挖掘方法,但是传统的聚类方法无法最大化利用多视数据的互补性信息,直接将单视聚类方法应用于多视数据无法获得较好的效果。因此,多视子空间聚类被提出。多视子空间聚类的目标是将近似采样于同一子低维空间的多视样本划分到同一类中,它可以整合来自多视数据的互补性信息并且要尽可能保证一致性。
近年来,各种多视子空间聚类方法被提出。由于自表示的子空间聚类方法具有完备的理论性和对噪声的鲁棒性,一些多视子空间聚类方法将数据的自表示性引入到多视聚类中。基于数据线性可分的假设,所谓的数据的自表示性,即数据样本可以被同一子空间(即同一类)的其他数据样本线性组合表示。互补性原则和一致性原则是多视学习中两大重要的准则。基于自表示的多视子空间聚类方法关键在于,如何利用多视数据特征学习融合多视信息的自表示系数矩阵。例如,为了更好地挖掘多视的互补性信息,Diversity-induced Multi-view Subspace Clustering(DiMSC)利用希尔伯特施密特独立性准则对多视的表示系数矩阵进行差异性约束。Low-rank Tensor constrained Multi-viewSubspace Clustering(LTMSC)采用低秩张量约束来探索多视表示系数矩阵之间的高阶关系。除了互补性信息,挖掘多视数据的一致性也是重要的。Consistent and SpecificMulti-view Subspace Clustering(CSMSC)将一致性和各视互补性信息编码为公共的表示系数矩阵和各视特定的表示系数矩阵。此外,一些多视子空间聚类方法基于特征层面融合多视信息。例如,Latent Multi-view Subspace Clustering(LMSC)假设多视数据来源于一个潜在的特征空间,随后经典的单视Low Rank Representation(LRR)子空间聚类方法应用在潜在的特征上获得公共的自表示系数矩阵。
虽然上述方法的聚类效果已经取得很大提升,但大部分多视自表示子空间聚类方法假设多视数据共享相同的自表示系数矩阵来探索多视数据中一致性信息。事实上,对于多视聚类这是不合理的,因为不同视的数据应该有视特定的自表示性质,即自表示系数矩阵应该是元素不相同的。然而,合理的假设应该是:不同视数据的自表示系数矩阵具有相同的数据分布或聚类结构,而并非完全元素一样。
发明内容
为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种多视子空间聚类方法,其能够充分利用多视数据之间的互补性信息,并且保证自表示矩阵的聚类结构一致性,在聚类性能上具有很大的提升。
本发明的技术方案是:这种多视子空间聚类方法,包括以下步骤:
(1)获取原始数据集的多视特征矩阵
(2)对于给定的多视数据X
(3)对于构造的多视子空间聚类模型,采用交替方向乘子法求解优化问题,得到秩结构一致的多视自表示系数矩阵;
(4)将多视自表示系数矩阵融合得到关联矩阵W,对关联矩阵W执行谱聚类得到最后的聚类结果。
本发明根据低秩自表示子空间聚类方法,对每个视数据的表示系数矩阵Z
还提供了一种多视子空间聚类装置,该装置包括:
获取模块,其获取原始数据集的多视特征矩阵
构建模块,其对于给定的多视数据X
求解模块,其对于构造的多视子空间聚类模型,采用交替方向乘子法求解优化问题,得到秩结构一致的多视自表示系数矩阵;
融合模块,其将多视自表示系数矩阵融合得到关联矩阵W,对关联矩阵W执行谱聚类得到最后的聚类结果。
附图说明
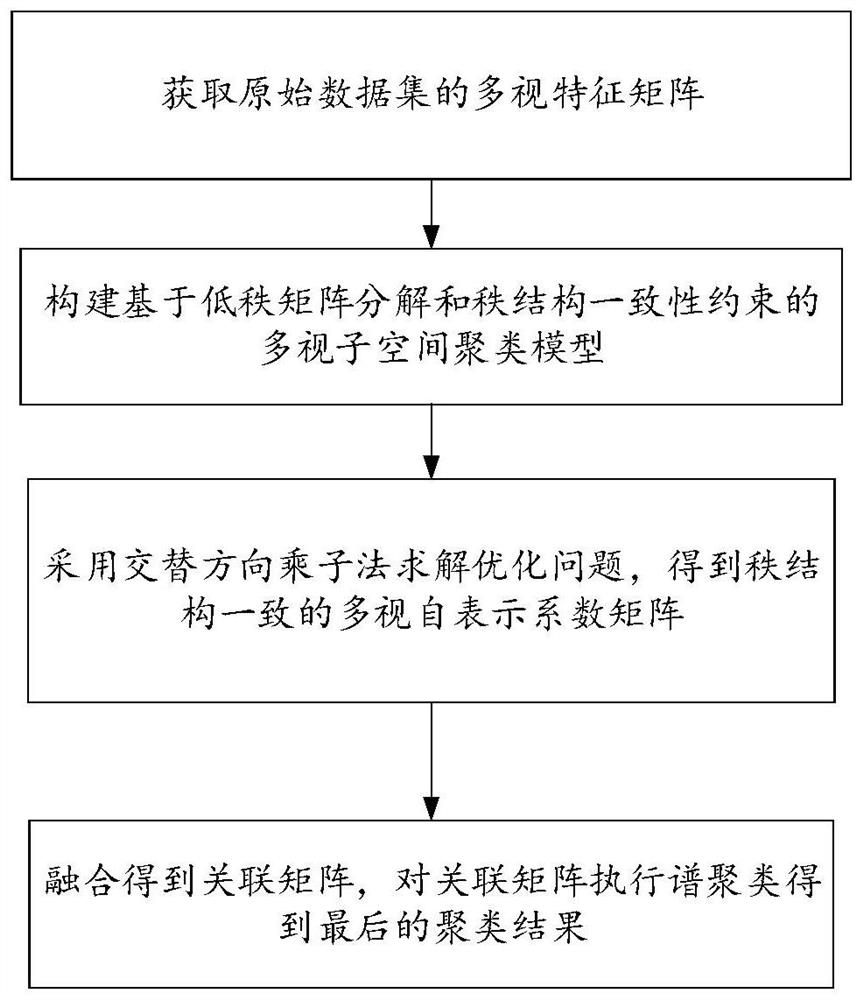
图1示出了根据本发明的多视子空间聚类方法的总体流程图。
具体实施方式
如图1所示,这种多视子空间聚类方法,包括以下步骤:
(1)获取原始数据集的多视特征矩阵
(2)对于给定的多视数据X
(3)对于构造的多视子空间聚类模型,采用交替方向乘子法求解优化问题,得到秩结构一致的多视自表示系数矩阵;
(4)将多视自表示系数矩阵融合得到关联矩阵W,对关联矩阵W执行谱聚类得到最后的聚类结果。
本发明根据低秩自表示子空间聚类方法,对每个视数据的表示系数矩阵Z
优选地,所述步骤(2)中,对于每个视的自表示系数矩阵进行矩阵分解,
优选地,所述步骤(1)中,对于所述原始数据集中的每个样本,采用不同的特征提取器提取不同类型的数据特征,进而组成多视数据特征矩阵
优选地,所述步骤(2)中,所述基于秩结构一致性的多视子空间聚类模型为:
s.t.X
其中Z
优选地,所述步骤(2)的矩阵分解中,||Z
其中,视特定的表示系数矩阵被分解为三矩阵相乘,并且左右矩阵正交,中间共享一个公共的核矩阵C,保证自表示系数矩阵的结构一致性,并且能够最大化挖掘互补信息提升聚类效果。
优选地,所述步骤(3)中,采用交替方向乘子法求解公式(2)得到秩结构一致的多视自表示系数矩阵,公式(2)的增广拉格朗日函数为
其中
优选地,所述步骤(3)中,交替优化上述增广拉格朗日函数中的所有变量直至收敛的步骤为:
固定其他变量,更新L
固定其他变量,更新R
固定其他变量,更新C:
固定其他变量,更新Z
固定其他变量,更新E
固定其他变量,更新拉格朗日乘子和惩罚系数:
其中
重复执行上述变量更新步骤直到达到收敛条件:
优选地,所述步骤(4)中,对于视特定的表示系数矩阵Z
然后,计算和分析聚类结果指标,包括ACC、NMI、F-score。
还提供了一种多视子空间聚类装置,该装置包括:
获取模块,其获取原始数据集的多视特征矩阵
构建模块,其对于给定的多视数据X
求解模块,其对于构造的多视子空间聚类模型,采用交替方向乘子法求解优化问题,得到秩结构一致的多视自表示系数矩阵;
融合模块,其将多视自表示系数矩阵融合得到关联矩阵W,对关联矩阵W执行谱聚类得到最后的聚类结果。
优选地,所述构建模块中,对于每个视的自表示系数矩阵进行矩阵分解,
以上所述,仅是本发明的较佳实施例,并非对本发明作任何形式上的限制,凡是依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属本发明技术方案的保护范围。
- 一种多视子空间聚类方法及装置
- 一种多视数据子空间聚类方法