基于粘性点阵的小麦粒非粘连图像获取方法及系统
文献发布时间:2023-06-19 10:02:03
技术领域
本发明属于小麦粒外观质量检测领域,特别涉及一种基于粘性点阵的小麦粒非粘连图像获取方法及系统。
背景技术
农作物种质资源丰富是对与之相关物种生命存在的基础,也是其它相关学科生命延续的物质保证。目前,世界上很多国家都在种植小麦,全球种植面积高达约为22556万公顷,占全球农作物种植资源的56%;其中中国、印度、美国、俄罗斯、法国是产量小麦前五的国家。虽然我国小麦种质资源十分丰富,是小麦产量大国,而小麦也是我国粮食供应的主要来源,但是因我国人口众多,且常年发生洪涝,干旱等自然灾害造成小麦年年减产,我国人口小麦消耗量也跟着逐年递减。
为此我们要提高我国小麦的种质,生产优质小麦。但小麦的核心是其所携带的基因,我国对于小麦新基因发掘方向的研究远远落后于发达国家,这是造成我们国家小麦产量少,长势不好的状况的根本原因,不仅给我国农业生产带来了很大的问题,更严重的是影响我国的人民生活水平的提高。所以世界各国历来对小麦优良种质基因的发掘十分重视。因此只有在了解我国优质麦与国际优质麦的差距,才能够更好的服务人民。
农作物在生长的过程中,其形态也会随之发生变化,农作物的形态特征就是农作物的肢体语言,对其形态特征的研究在种子培育的工作、生长趋势的分析、是否产生病害等方面都有着重要的意义和帮助。
为了提高我国小麦的产量,提升小麦种质,首先就是要对小麦粒的形态特征进行提取和分析,为日后我国在研究小麦育种方面优质基因贫乏的问题时能够提供最基础的保障,这对我国人民生活品质的提升与农业生产也都有着非常深远的影响。
在农业领域中,大范围、实时、高效地获取农情信息是现代农业产和管理的一个重要环节,传统的人工采集技术和有线测量的数据获取方式在实时性、精准性和便携性等方面满足不了现代精准农业的要求。在计算机技术不断发展的过程中,图形图像处理技术的应用,可以对我国目前在作物栽培育种时面临的问题提供最基础的保证,对农作物各方面的检测起着至关重要的作用,从而保证农作物质量的提高。目前我国对于小麦的外观品质的检测仍然主要停留在人工观察的阶段,这种对粮食外观品质的检测工作一直以来存在着工作量大、精准度低、工作效率低并且明显地缺乏其准确性和操作便捷性,而且难以很好地适应实际的生活和工作中的大批量的粮食品质检测。
针对这些技术问题本文首先提出了一种基于粘性点阵的小麦粒非粘连图像获取方法及系统,对于小麦在粮食品质自动检测技术领域的应用做了有着重要意义的基础性研究和技术探索。
发明内容
本发明目的是提供一种基于粘性点阵的小麦粒非粘连图像获取方法及系统,通过将小麦粒进行均匀排布,并实时采集均匀分布的高精度小麦粒非粘连颗粒形态图像,方便观察每一粒小麦粒的外观形态和特征,便于日后对小麦粒形态特征的提取与检测进行分析。
为解决上述技术问题本发明提供了基于粘性点阵的小麦粒非粘连图像获取系统,包括有传送带以及控制器,传送带前侧设置有机械手一,传送带后侧设置有点胶机以及粮斗,传送带上表面放置有黑色硬质粗糙板,传送带左侧设置有可翻转平板机构,可翻转平板机构后侧设置有机械手二,可翻转平板机构左侧设置有摄像装置。
进一步的,所述的点胶机包括有点胶针管、升降电缸、储胶仓、导胶管、导杆、供胶泵、支架、储胶仓,支架上设置有升降电缸,升降电缸输出端贯穿支架,升降电缸输出端连接有储胶仓下部设置有均匀排布的点胶针管,储胶仓上部连接有导胶管,导胶管贯穿支架,导胶管上端设置有供胶泵,导胶管下部为伸缩管,储胶仓上表面左右两侧各设置有导杆。
进一步的,所述的粮斗包括有储料仓、步进电机、下料口、转辊,储料仓固定连接在支架左侧,储料仓下部固定连接有下料口,下料口内可转动的设置有转辊,转辊与步进电机输出端连接,步进电机固定在下料口前侧面,转辊上设置有通孔。
进一步的,所述的导杆上端可滑动的贯穿支架。
进一步的,所述的点胶针管下端为锥形。
进一步的,所述的储胶仓位于黑色硬质粗糙板正上方。
本发明还提供了基于粘性点阵的小麦粒非粘连图像获取方法,包括:
S1:通过控制器设定程序,设定控制机械手一将黑色硬质粗糙板放置在传送带上;将小麦放置在储料仓内,通过控制器控制机械手一加持黑色硬质粗糙板放置在传送带上表面;
S2:机械手一放置黑色硬质粗糙板完成后,通过控制器控制传送带向左移动至储胶仓下部;
S3:控制器控制升降电缸带动储胶仓向下移动,直至储胶仓下部的点胶针管触碰到黑色硬质粗糙板;
S4:控制器控制供胶泵向储胶仓内供给胶水,胶水通过点胶针管向黑色硬质粗糙板排胶,胶点大小可以粘连单个小麦粒,完成点胶,控制器控制升降电缸再带动储胶仓向上移动复位;
S5:储胶仓与储料仓之间的距离固定,黑色硬质粗糙板尺寸固定,因此可以通过控制器控制传送带的移动距离来进行精准控制,控制器控制传送带带动点胶完成后的黑色硬质粗糙板向左移动,当移动至储料仓下部时,控制器控制步进电机转动90度,此时转辊上开设的通孔与下料口重合,小麦粒可通过下料口落至黑色硬质粗糙板上,与胶点接触的小麦粒被粘连在黑色硬质粗糙板上,当传送带带动黑色硬质粗糙板移动过储料仓下方的下料口时,控制器控制步进电机旋转90度,转辊转动90度后下料口闭合;
S6:可翻转平板机构与传送带之间的距离固定,因此可以通过控制器控制传送带的移动距离来精准控制黑色硬质粗糙板移动至可翻转平板机构上,黑色硬质粗糙板随传送带向左移动,直至黑色硬质粗糙板进入至可翻转平板机构上,当黑色硬质粗糙板位于可翻转平板机构上时,固定在可翻转平板机构上的机械手二夹紧黑色硬质粗糙板,控制器控制可翻转平板机构向左转动,将黑色硬质粗糙板倾斜使得上面未粘连的多余的小麦粒脱离黑色硬质粗糙板;
S7:控制器控制摄像装置上的摄像头对倾斜的黑色硬质粗糙板上的矩阵排布的小麦粒进行拍摄,并传送至计算机内保存,完成对矩阵小麦粒的拍摄。
本发明的一种基于粘性点阵的小麦粒非粘连图像获取方法及系统,将小麦粒放置在储料仓内,通过控制器设定机械手一、机械手二、传送带、供胶泵、升降电缸、步进电机、可翻转平板机构的工作程序;即先通过控制器控制机械手一加持黑色硬质粗糙板放置在传送带上表面,机械手一与机械手二为现有技术,可以控制其能加持方形黑色硬质粗糙板即可,在此不做其他限定;机械手一放置黑色硬质粗糙板完成后,通过控制器控制传送带向左移动至储胶仓下部;控制器控制升降电缸带动储胶仓向下移动,直至储胶仓下部的点胶针管触碰到黑色硬质粗糙板;控制器控制供胶泵向储胶仓内供给胶水,胶水通过点胶针管向黑色硬质粗糙板排胶,胶点大小可以粘连单个小麦粒,即保证点胶的面积小于单个小麦粒在黑色硬质粗糙板上的正投影面积,且使得胶水由于表面张力作用不会自行滴落,完成点胶;控制器控制升降电缸再带动储胶仓向上移动复位。
储胶仓与储料仓之间的距离固定,黑色硬质粗糙板尺寸固定,因此可以通过控制器控制传送带的移动距离来进行精准控制,控制器控制传送带带动点胶完成后的黑色硬质粗糙板向左移动,当移动至储料仓下部时,控制器控制步进电机转动90度,此时转辊上开设的通孔与下料口重合,小麦粒可通过下料口落至黑色硬质粗糙板上,与胶点接触的小麦粒被粘连在黑色硬质粗糙板上,当传送带带动黑色硬质粗糙板移动过储料仓下方的下料口时,控制器控制步进电机旋转90度,转辊转动90度后下料口闭合。
可翻转平板机构与传送带之间的距离固定,因此可以通过控制器控制传送带的移动距离来精准控制黑色硬质粗糙板移动至可翻转平板机构上,黑色硬质粗糙板随传送带向左移动,直至黑色硬质粗糙板进入至可翻转平板机构上,当黑色硬质粗糙板位于可翻转平板机构上时,固定在可翻转平板机构上的机械手二夹紧黑色硬质粗糙板,控制器控制可翻转平板机构向左转动,将黑色硬质粗糙板倾斜使得上面未粘连的多余的小麦粒脱离黑色硬质粗糙板;控制器控制摄像装置上的摄像头对倾斜的黑色硬质粗糙板上的矩阵排布的小麦粒进行拍摄,获取互不粘连小麦粒图像,并传送至计算机内保存,完成对矩阵小麦粒的拍摄。该发明能够采集到均匀分布的高精度小麦粒非粘连颗粒形态图像,方便的观察每一粒的外观形态和特征,准确的对其外观形态特征进行了描述,便于日后对小麦粒形态特征的提取与检测进行分析。
附图说明
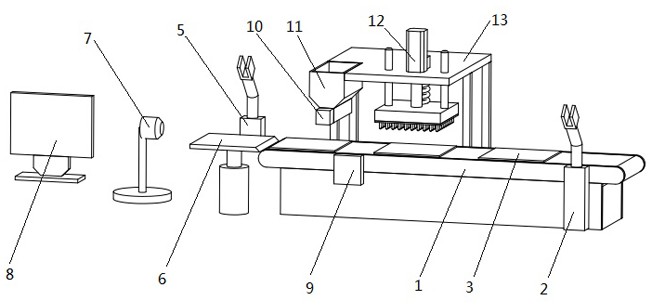
图1为本发明的一种基于粘性点阵的小麦粒非粘连图像获取系统组成结构示意图。
图2为本发明的一种基于粘性点阵的小麦粒非粘连图像获取系统部分结构示意图。
图3为本发明的一种基于粘性点阵的小麦粒非粘连图像获取系统中点胶机的结构示意图。
图4为本发明的一种基于粘性点阵的小麦粒非粘连图像获取系统中粮斗结构示意图。
附图标记说明:
1.传送带、2.机械手一、3.黑色硬质粗糙板、4.转辊、5.机械手二、6.可翻转平板机构、7.摄像装置、8.计算机、9.控制器、10.步进电机、11.储料仓、12.升降电缸、13.支架、14.下料口、15.导杆、16.供胶泵、17.导胶管、18.储胶仓、19.点胶针管、20.通孔。
具体实施方式
实施例1,如图1-4所示,一种基于粘性点阵的小麦粒非粘连图像获取系统,包括有传送带1以及控制器9,传送带1为现有技术,能够控制传送带1的传动距离以及速度即可,不再赘述;控制器9优选为三菱FX2N-64MT-001控制器9,通过控制器9设定机械手一2、机械手二5、传送带1、供胶泵16、升降电缸12、步进电机10、可翻转平板机构6的工作程序;传送带1前侧设置有机械手一2,传送带1后侧设置有点胶机以及粮斗,传送带1上表面放置有黑色硬质粗糙板3,传送带1左侧设置有可翻转平板机构6,可翻转平板机构6后侧设置有机械手二5,可翻转平板机构6左侧设置有摄像装置7。
点胶机包括有点胶针管19、升降电缸12、储胶仓18、导胶管17、导杆15、供胶泵16、支架13、储胶仓18,储胶仓18位于黑色硬质粗糙板3正上方;支架13上设置有升降电缸12,升降电缸12优选为艾伺顿尔80系列伺服电缸,升降电缸12输出端贯穿支架13,升降电缸12输出端连接有储胶仓18下部设置有均匀排布的点胶针管19,点胶针管19下端为锥形;储胶仓18上部连接有导胶管17,导胶管17贯穿支架13,导胶管17上端设置有供胶泵16,导胶管17下部为伸缩管,储胶仓18上表面左右两侧各设置有导杆15,导杆15上端可滑动的贯穿支架13。
粮斗包括有储料仓11、步进电机10、下料口14、转辊4,步进电机10优选为塞雷42HS08步进电机10,储料仓11固定连接在支架13左侧,储料仓11下部固定连接有下料口14,下料口14内可转动的设置有转辊4,转辊4与下料口14之间为间隙配合,转辊4上设置有条形通孔20,当通孔20位于下料口14的下方时,小麦粒可以从下料口14落下,转动转辊4时通孔20与下料口14错开,小麦粒无法从下料口14落下,转辊4与步进电机10输出端连接,步进电机10固定在下料口14前侧面。
实施例2,本发明还提供了基于粘性点阵的小麦粒非粘连图像获取方法,其特征在于,包括:
S1:通过控制器设定程序,设定控制机械手一将黑色硬质粗糙板放置在传送带上;将小麦放置在储料仓内,通过控制器控制机械手一加持黑色硬质粗糙板放置在传送带上表面;
S2:机械手一放置黑色硬质粗糙板完成后,通过控制器控制传送带向左移动至储胶仓下部;
S3:控制器控制升降电缸带动储胶仓向下移动,直至储胶仓下部的点胶针管触碰到黑色硬质粗糙板;
S4:控制器控制供胶泵向储胶仓内供给胶水,胶水通过点胶针管向黑色硬质粗糙板排胶,胶点大小可以粘连单个小麦粒,完成点胶,控制器控制升降电缸再带动储胶仓向上移动复位;
S5:储胶仓与储料仓之间的距离固定,黑色硬质粗糙板尺寸固定,因此可以通过控制器控制传送带的移动距离来进行精准控制,控制器控制传送带带动点胶完成后的黑色硬质粗糙板向左移动,当移动至储料仓下部时,控制器控制步进电机转动90度,此时转辊上开设的通孔与下料口重合,小麦粒可通过下料口落至黑色硬质粗糙板上,与胶点接触的小麦粒被粘连在黑色硬质粗糙板上,当传送带带动黑色硬质粗糙板移动过储料仓下方的下料口时,控制器控制步进电机旋转90度,转辊转动90度后下料口闭合;
S6:可翻转平板机构与传送带之间的距离固定,因此可以通过控制器控制传送带的移动距离来精准控制黑色硬质粗糙板移动至可翻转平板机构上,黑色硬质粗糙板随传送带向左移动,直至黑色硬质粗糙板进入至可翻转平板机构上,当黑色硬质粗糙板位于可翻转平板机构上时,固定在可翻转平板机构上的机械手二夹紧黑色硬质粗糙板,控制器控制可翻转平板机构向左转动,将黑色硬质粗糙板倾斜使得上面未粘连的多余的小麦粒脱离黑色硬质粗糙板;
S7:控制器控制摄像装置上的摄像头对倾斜的黑色硬质粗糙板上的矩阵排布的小麦粒进行拍摄,并传送至计算机内保存,完成对矩阵小麦粒的拍摄。
本发明的一种基于粘性点阵的小麦粒非粘连图像获取方法及系统,将小麦粒放置在储料仓11内,通过控制器9设定机械手一2、机械手二5、传送带1、升降电缸12、供胶泵16、步进电机10、可翻转平板机构6的工作程序;即先通过控制器9控制机械手一2加持黑色硬质粗糙板3放置在传送带1上表面,机械手一2与机械手二5为现有技术,可以控制其能加持方形黑色硬质粗糙板3即可,在此不做其他限定;机械手一2放置黑色硬质粗糙板3完成后,通过控制器9控制传送带1向左移动至储胶仓18下部;控制器9控制升降电缸12带动储胶仓18向下移动,直至储胶仓18下部的点胶针管19触碰到黑色硬质粗糙板3;控制器9控制供胶泵16向储胶仓18内供给胶水,胶水通过点胶针管19向黑色硬质粗糙板3排胶,胶点大小可以粘连单个小麦粒,完成点胶,控制器9控制升降电缸12再带动储胶仓18向上移动复位。
储胶仓18与储料仓11之间的距离固定,黑色硬质粗糙板3尺寸固定,因此可以通过控制器9控制传送带1的移动距离来进行精准控制,控制器9控制传送带1带动点胶完成后的黑色硬质粗糙板3向左移动,当移动至储料仓11下部时,控制器9控制步进电机10转动90度,此时转辊4上开设的通孔20与下料口14重合,小麦粒可通过下料口14落至黑色硬质粗糙板3上,与胶点接触的小麦粒被粘连在黑色硬质粗糙板3上,当传送带1带动黑色硬质粗糙板3移动过储料仓11下方的下料口14时,控制器9控制步进电机10旋转90度,转辊4转动90度后下料口14闭合。
可翻转平板机构6与传送带1之间的距离固定,因此可以通过控制器9控制传送带1的移动距离来精准控制黑色硬质粗糙板3移动至可翻转平板机构6上,黑色硬质粗糙板3随传送带1向左移动,直至黑色硬质粗糙板3进入至可翻转平板机构6上,当黑色硬质粗糙板3位于可翻转平板机构6上时,固定在可翻转平板机构6上的机械手二5夹紧黑色硬质粗糙板3,控制器9控制可翻转平板机构6向左转动,将黑色硬质粗糙板3倾斜使得上面未粘连的多余的小麦粒脱离黑色硬质粗糙板3;控制器9控制摄像装置7上的摄像头对倾斜的黑色硬质粗糙板3上的矩阵排布的小麦粒进行拍摄,获取互不粘连小麦粒图像,并传送至计算机8内保存,完成对矩阵小麦粒的拍摄。该发明能够采集到均匀分布的高精度小麦粒非粘连颗粒形态图像,方便的观察每一粒的外观形态和特征,准确的对其外观形态特征进行了描述,便于日后对小麦粒形态特征的提取与检测进行分析。
以上所述仅为本发明的优选实施例而已,并不用以限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于粘性点阵的小麦粒非粘连图像获取方法及系统
- 基于异形管阵列的黄豆粒非粘连图像获取方法及系统