钢轨接头轨缝宽度的检测方法及装置
文献发布时间:2023-06-19 10:03:37
技术领域
本发明涉及轨道交通技术领域,特别涉及一种钢轨接头轨缝宽度的检测方法及装置。
背景技术
钢轨接头是轨道的薄弱环节,其结构特征为两块夹板和若干个固定螺栓将两根钢轨加以联结。钢轨接头存在着轨缝,破坏了钢轨的连续性,当车轮滚到接头时,接头部分受到很大的冲击荷载作用。当换轨时轨缝设置不当或温度引起的钢轨伸缩变化导致轨缝过大时,这些冲击荷载甚至可以达到非接头区的4~5倍,并且轨缝愈大,轮轨间的冲击愈大。冲击作用致使轨道接头部位受到的破坏比其他部位的严重,造成接头轨面不良、磨耗不均匀等接头病害,而接头病害产生之后,又进一步加剧机车车辆轮对对线路的破坏作用。因此,钢轨接头是铁路工务部门日常养护维修的重点,养护中要对轨缝宽度进行检测使得接头处始终保持合理的轨缝值。
现有的轨缝宽度检测依靠人工巡检的方式,例如,利用刻度尺在钢轨接头处进行测量,但是这种方法检测速度慢、人工成本高,并且检测的准确性难以保障,这使得现有的轨缝宽度检测难以为线路的养护维修提供可靠的参考。随着机器视觉技术的快速发展,基于图像处理的机器视觉检测技术已经运用到了轨道状态巡检中,但是机器视觉检测技术主要应用在钢轨表面擦伤、扣件和轨道板裂纹等轨道外观状态缺陷的检测,以及钢轨光带的检测,并未涉及钢轨接头轨缝宽度的检测。
针对上述问题,目前尚未提出有效的解决方案。
发明内容
本发明实施例提供一种钢轨接头轨缝宽度的检测方法,用以提高钢轨接头轨缝宽度检测的效率和准确性,该方法包括:
根据轨道图像的像素灰度,从轨道图像中确定钢轨顶面区域;
根据钢轨顶面区域的像素灰度,从钢轨顶面区域中确定钢轨接头轨缝区域;
根据钢轨接头轨缝区域,基于边缘检测,识别钢轨接头轨缝的上边缘和下边缘;
根据钢轨接头轨缝的上边缘和下边缘,确定钢轨接头轨缝宽度。
本发明实施例提供一种钢轨接头轨缝宽度的检测装置,用以提高钢轨接头轨缝宽度检测的效率和准确性,该装置包括:
钢轨顶面区域确定模块,用于根据轨道图像的像素灰度,从轨道图像中确定钢轨顶面区域;
钢轨接头轨缝区域确定模块,用于根据钢轨顶面区域的像素灰度,从钢轨顶面区域中确定钢轨接头轨缝区域;
上边缘和下边缘识别模块,用于根据钢轨接头轨缝区域,基于边缘检测,识别钢轨接头轨缝的上边缘和下边缘;
轨缝宽度确定模块,用于根据钢轨接头轨缝的上边缘和下边缘,确定钢轨接头轨缝宽度。
本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述钢轨接头轨缝宽度的检测方法。
本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有执行上述钢轨接头轨缝宽度的检测方法的计算机程序。
本发明实施例通过:根据轨道图像的像素灰度,从轨道图像中确定钢轨顶面区域;根据钢轨顶面区域的像素灰度,从钢轨顶面区域中确定钢轨接头轨缝区域;根据钢轨接头轨缝区域,基于边缘检测,识别钢轨接头轨缝的上边缘和下边缘;根据钢轨接头轨缝的上边缘和下边缘,确定钢轨接头轨缝宽度,与现有的人工检测钢轨接头轨缝宽度的方法相比,本发明能够基于钢轨图像上钢轨接头轨缝的灰度特性自动检测钢轨接头轨缝区域,基于边缘检测技术自动识别钢轨接头轨缝的上边缘和下边缘,并确定钢轨接头轨缝的宽度,提高了钢轨接头轨缝宽度检测的效率和准确性,为轨道的养护维修提供了可靠的依据。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
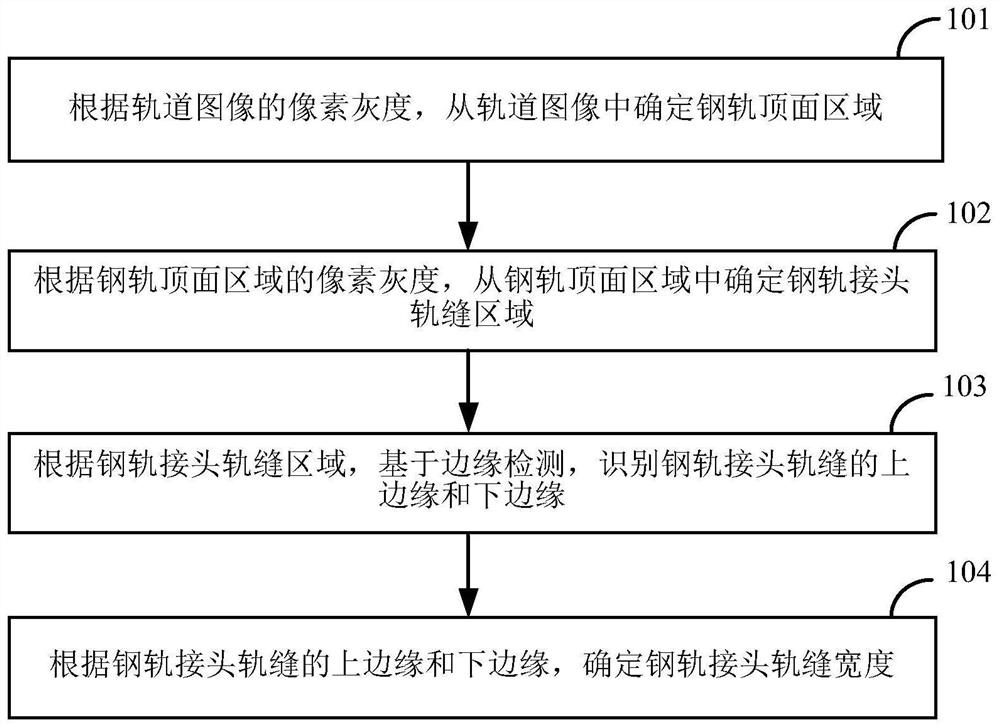
图1为本发明实施例中钢轨接头轨缝宽度的检测方法流程的示意图;
图2为图1中步骤101的具体流程的示意图;
图3为图2中步骤205的具体流程的示意图;
图4为本发明实施例中轨道图像的示意图;
图5为本发明实施例中钢轨顶面区域图像的示意图;
图6为图1中步骤102的具体流程的示意图;
图7为钢轨顶面区域图像每行的像素灰度均值的曲线图;
图8为图1中步骤103的具体流程的示意图;
图9为图8中步骤802的具体流程的示意图;
图10为图8中步骤803的具体流程的示意图;
图11(a)为上边缘检测算子的示意图;
图11(b)为下边缘检测算子的示意图;
图12为图1中步骤104的具体流程的示意图;
图13为本发明实施例中钢轨接头轨缝宽度的检测装置结构的示意图。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚明白,下面结合附图对本发明实施例做进一步详细说明。在此,本发明的示意性实施例及其说明用于解释本发明,但并不作为对本发明的限定。
为了解决现有的基于人工巡检方式检测轨缝宽度的效率和准确性较低的技术问题,本发明实施例提供一种钢轨接头轨缝宽度的检测方法,用以提高钢轨接头轨缝宽度检测的效率和准确性,图1为本发明实施例中钢轨接头轨缝宽度的检测方法流程的示意图,如图1所示,该方法包括:
步骤101:根据轨道图像的像素灰度,从轨道图像中确定钢轨顶面区域;
步骤102:根据钢轨顶面区域的像素灰度,从钢轨顶面区域中确定钢轨接头轨缝区域;
步骤103:根据钢轨接头轨缝区域,基于边缘检测,识别钢轨接头轨缝的上边缘和下边缘;
步骤104:根据钢轨接头轨缝的上边缘和下边缘,确定钢轨接头轨缝宽度。
首先,介绍上述步骤101。
图2为图1中步骤101的具体流程的示意图,如图2所示,在一个实施例中,步骤101可以包括:
步骤201:沿平行于钢轨的方向,按照像素点将轨道图像划分为多列,确定每列图像的像素灰度均值;
步骤202:根据轨道图像、轨道图像采集装置的安装位置,以及钢轨轨顶宽度,预测钢轨顶面区域;
步骤203:根据每列图像与预测的钢轨顶面区域之间的距离,确定每列图像的权重衰减参数;
步骤204:根据每列图像的像素灰度均值和每列图像的权重衰减参数,确定每列图像的加权像素灰度均值;
步骤205:根据多列图像的加权像素灰度均值,从轨道图像中确定钢轨顶面区域。
在一个实施例中,步骤204可以包括:按照如下公式确定每列图像的加权像素灰度均值:
m
其中,
式中,m
图3为图2中步骤205的具体流程的示意图,如图3所示,在一个实施例中,步骤205可以包括:
步骤301:沿平行于钢轨的方向,从轨道图像中提取多个宽度为钢轨轨顶宽度的图像块,确定每个图像块中多列图像的加权像素灰度均值之和;
步骤302:将多列图像的加权像素灰度均值之和最大的图像块,确定为钢轨顶面区域。
具体实施时,可以从钢轨上方拍摄轨道图像,读取拍摄的轨道图像如图4所示。由于车轮与钢轨表面长期摩擦使得钢轨灰度值高,同时图像中钢轨轨顶面的宽度是固定值(记作R),利用轨道图像的像素灰度信息,可以从轨道图像中标记出钢轨顶面区域,包括如下步骤:首先,沿平行于钢轨的方向,按照像素点将轨道图像划分为多列,计算每列图像的像素灰度均值,记作m(x),其中,x=1,2,…,W
然后,介绍上述步骤102。
图6为图1中步骤102的具体流程的示意图,如图6所示,在一个实施例中,步骤102可以包括:
步骤601:根据钢轨顶面区域的像素灰度均值,确定钢轨接头轨缝区域的像素灰度阈值;
步骤602:沿垂直于钢轨的方向,按照像素点将钢轨顶面区域划分为多行,确定每行图像的像素灰度均值;
步骤603:分别将每行图像的像素灰度均值与像素灰度阈值进行比较,将像素灰度均值小于像素灰度阈值对应的行的图像确定为钢轨接头轨缝区域。
具体实施时,可以根据标记得到的钢轨顶面区域图像,绘制钢轨顶面区域图像每行的像素灰度均值的曲线图,如图7所示,钢轨接头轨缝区域所在的行位于两条竖线标记之间,由于钢轨顶面区域中钢轨接头轨缝区域所在行的像素灰度均值低于非钢轨接头轨缝区域所在行的像素灰度均值,因此可根据上述钢轨接头轨缝区域的灰度曲线特征,判断钢轨图像中是否存在钢轨接头,具体包括如下步骤:首先,计算钢轨顶面区域的像素灰度均值,将计算出的钢轨顶面区域的像素灰度均值除以2,得到灰度阈值t
接着,介绍上述步骤103。
图8为图1中步骤103的具体流程的示意图,如图8所示,在一个实施例中,步骤103可以包括:
步骤801:根据钢轨接头轨缝的上边缘和下边缘的灰度变化趋势,构建上边缘检测算子和下边缘检测算子;
步骤802:根据钢轨接头轨缝区域的上边界所在行的坐标、下边界所在行的坐标,以及上边界与下边界之间的距离,确定钢轨接头轨缝的上边缘取值范围和下边缘取值范围;
步骤803:根据钢轨接头轨缝的上边缘取值范围和下边缘取值范围,以及上边缘检测算子和下边缘检测算子,识别钢轨接头轨缝的上边缘和下边缘。
图9为图8中步骤802的具体流程的示意图,如图9所示,在一个实施例中,步骤802包括:
步骤901:将上边界与下边界之间的距离的二分之一,与上边界所在行的坐标之和,确定为钢轨接头轨缝的上边缘取值范围的上限;
步骤902:将上边界与下边界之间的距离的二分之一,与上边界所在行的坐标之差的绝对值,确定为钢轨接头轨缝的上边缘取值范围的下限;
步骤903:将上边界与下边界之间的距离的二分之一,与下边界所在行的坐标之和,确定为钢轨接头轨缝的下边缘取值范围的上限;
步骤904:将上边界与下边界之间的距离的二分之一,与下边界所在行的坐标之差的绝对值,确定为钢轨接头轨缝的下边缘取值范围的下限。
图10为图8中步骤803的具体流程的示意图,如图10所示,在一个实施例中,步骤803包括:
步骤1001:将上边缘取值范围中的每个像素点的像素值与上边缘检测算子进行卷积,确定上边缘取值范围中的每个像素点的梯度值;
步骤1002:沿平行于钢轨的方向,按照像素点将上边缘取值范围划分为多列,将上边缘取值范围的每列中梯度值最大的像素点确定为钢轨接头轨缝的上边缘的像素点;
步骤1003:将下边缘取值范围中的每个像素点的像素值与下边缘检测算子进行卷积,确定下边缘取值范围中的每个像素点的梯度值;
步骤1004:沿平行于钢轨的方向,按照像素点将下边缘取值范围划分为多列,将下边缘取值范围的每列中梯度值最大的像素点确定为钢轨接头轨缝的下边缘的像素点。
具体实施时,由于钢轨图像中钢轨接头轨缝的上边缘为由亮到暗的边缘,从而可以构建图11(a)所示的边缘检测算子来检测由亮到暗的上边缘,因此钢轨接头轨缝的上边缘在钢轨图像的纵向某一列中的位置为该列中与图11(a)所示的边缘检测算子卷积具有最大梯度值的像素点的位置,同理,钢轨图像中钢轨接头轨缝的下边缘为由暗到亮的边缘,从而可以构建如11(b)所示的边缘检测算子来检测由暗到亮的下边缘,因此钢轨接头轨缝的下边缘在钢轨图像的纵向某一列中的位置为该列中与11(b)所示的边缘检测算子卷积具有最大梯度值的像素点的位置。
具体可以包括如下步骤:首先,根据钢轨接头轨缝的上边缘和下边缘的灰度变化趋势,构建图11(a)所示的上边缘检测算子和11(b)所示的下边缘检测算子;然后,根据钢轨接头轨缝区域的上边界所在行的坐标r
最后,介绍上述步骤104。
图12为图1中步骤104的具体流程的示意图,如图12所示,在一个实施例中,步骤104可以包括:
步骤1201:根据钢轨接头轨缝的上边缘的像素位置和下边缘的像素位置,确定钢轨接头轨缝的上边缘与下边缘间距的最大值、最小值和平均值;
步骤1202:分别将钢轨接头轨缝的上边缘与下边缘间距的最大值、最小值和平均值乘以钢轨图像的分辨率,确定钢轨接头轨缝宽度的最大值、最小值和平均值。
具体实施时,在标记出钢轨接头轨缝的上边缘和下边缘后,可以根据钢轨接头轨缝区域的纵向每一列的上边缘和下边缘的像素位置,计算出钢轨接头轨缝的像素间距。同时,在具体的应用场景中,线阵相机在沿着钢轨延伸的纵向方向以等空间间距记录轨道图像,图像的纵向的空间分辨率是固定的,记作δ,根据钢轨接头轨缝的像素间距和钢轨图像的纵向的空间分辨率,可以计算钢轨接头轨缝的宽度。
具体包括如下步骤:首先,根据钢轨接头轨缝的上边缘的像素位置和下边缘的像素位置,逐列计算纵向每一列的上边缘和下边缘的像素间距;然后,统计钢轨接头轨缝区域的纵向每一列的像素间距,计算出钢轨接头轨缝的像素间距的最大值d
基于同一发明构思,本发明实施例中还提供了一种钢轨接头轨缝宽度的检测装置,如下面的实施例。由于钢轨接头轨缝宽度的检测装置解决问题的原理与钢轨接头轨缝宽度的检测方法相似,因此装置的实施可以参见方法的实施,重复之处不再赘述。以下所使用的,术语“单元”或者“模块”可以实现预定功能的软件和/或硬件的组合。尽管以下实施例所描述的装置较佳地以软件来实现,但是硬件,或者软件和硬件的组合的实现也是可能并被构想的。
本发明实施例提供一种钢轨接头轨缝宽度的检测装置,用以提高钢轨接头轨缝宽度检测的效率和准确性,图13为本发明实施例中钢轨接头轨缝宽度的检测装置结构的示意图,如图13所示,该装置包括:
钢轨顶面区域确定模块01,用于根据轨道图像的像素灰度,从轨道图像中确定钢轨顶面区域;
钢轨接头轨缝区域确定模块02,用于根据钢轨顶面区域的像素灰度,从钢轨顶面区域中确定钢轨接头轨缝区域;
上边缘和下边缘识别模块03,用于根据钢轨接头轨缝区域,基于边缘检测,识别钢轨接头轨缝的上边缘和下边缘;
轨缝宽度确定模块04,用于根据钢轨接头轨缝的上边缘和下边缘,确定钢轨接头轨缝宽度。
在一个实施例中,钢轨顶面区域确定模块01具体用于:
沿平行于钢轨的方向,按照像素点将轨道图像划分为多列,确定每列图像的像素灰度均值;
根据轨道图像、轨道图像采集装置的安装位置,以及钢轨轨顶宽度,预测钢轨顶面区域;
根据每列图像与预测的钢轨顶面区域的距离,确定每列图像的权重衰减参数;
根据每列图像的像素灰度均值和每列图像的权重衰减参数,确定每列图像的加权像素灰度均值;
根据多列图像的加权像素灰度均值,从轨道图像中确定钢轨顶面区域。
在一个实施例中,钢轨顶面区域确定模块01进一步用于:
按照如下方式确定每列图像的加权像素灰度均值:
m
其中,
式中,m
在一个实施例中,钢轨顶面区域确定模块01进一步用于:
沿平行于钢轨的方向,从轨道图像中提取多个宽度为钢轨轨顶宽度的图像块,确定每个图像块中多列图像的加权像素灰度均值之和;
将多列图像的加权像素灰度均值之和最大的图像块,确定为钢轨顶面区域。
在一个实施例中,钢轨接头轨缝区域确定模块02具体用于:
根据钢轨顶面区域的像素灰度均值,确定钢轨接头轨缝区域的像素灰度阈值;
沿垂直于钢轨的方向,按照像素点将钢轨顶面区域划分为多行,确定每行图像的像素灰度均值;
分别将每行图像的像素灰度均值与像素灰度阈值进行比较,将像素灰度均值小于像素灰度阈值对应的行的图像确定为钢轨接头轨缝区域。
在一个实施例中,上边缘和下边缘识别模块03具体用于:
根据钢轨接头轨缝的上边缘和下边缘的灰度变化趋势,构建上边缘检测算子和下边缘检测算子;
根据钢轨接头轨缝区域的上边界所在行的坐标、下边界所在行的坐标,以及上边界与下边界之间的距离,确定钢轨接头轨缝的上边缘取值范围和下边缘取值范围;
根据钢轨接头轨缝的上边缘取值范围和下边缘取值范围,以及上边缘检测算子和下边缘检测算子,识别钢轨接头轨缝的上边缘和下边缘。
在一个实施例中,上边缘和下边缘识别模块03进一步用于:
将上边界与下边界之间的距离的二分之一,与上边界所在行的坐标之和,确定为钢轨接头轨缝的上边缘取值范围的上限;
将上边界与下边界之间的距离的二分之一,与上边界所在行的坐标之差的绝对值,确定为钢轨接头轨缝的上边缘取值范围的下限;
将上边界与下边界之间的距离的二分之一,与下边界所在行的坐标之和,确定为钢轨接头轨缝的下边缘取值范围的上限;
将上边界与下边界之间的距离的二分之一,与下边界所在行的坐标之差的绝对值,确定为钢轨接头轨缝的下边缘取值范围的下限。
在一个实施例中,上边缘和下边缘识别模块03进一步用于:
将上边缘取值范围中的每个像素点的像素值与上边缘检测算子进行卷积,确定上边缘取值范围中的每个像素点的梯度值;
沿平行于钢轨的方向,按照像素点将上边缘取值范围划分为多列,将上边缘取值范围的每列中梯度值最大的像素点确定为钢轨接头轨缝的上边缘的像素点;
将下边缘取值范围中的每个像素点的像素值与下边缘检测算子进行卷积,确定下边缘取值范围中的每个像素点的梯度值;
沿平行于钢轨的方向,按照像素点将下边缘取值范围划分为多列,将下边缘取值范围的每列中梯度值最大的像素点确定为钢轨接头轨缝的下边缘的像素点。
在一个实施例中,轨缝宽度确定模块04具体用于:
根据钢轨接头轨缝的上边缘的像素位置和下边缘的像素位置,确定钢轨接头轨缝的上边缘与下边缘间距的最大值、最小值和平均值;
分别将钢轨接头轨缝的上边缘与下边缘间距的最大值、最小值和平均值乘以钢轨图像的分辨率,确定钢轨接头轨缝宽度的最大值、最小值和平均值。
本发明实施例还提供了一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,处理器执行计算机程序时实现上述钢轨接头轨缝宽度的检测方法。
本发明实施例还提供了一种计算机可读存储介质,计算机可读存储介质存储有执行上述钢轨接头轨缝宽度的检测方法的计算机程序。
综上所述,本发明实施例通过:根据轨道图像的像素灰度,从轨道图像中确定钢轨顶面区域;根据钢轨顶面区域的像素灰度,从钢轨顶面区域中确定钢轨接头轨缝区域;根据钢轨接头轨缝区域,基于边缘检测,识别钢轨接头轨缝的上边缘和下边缘;根据钢轨接头轨缝的上边缘和下边缘,确定钢轨接头轨缝宽度,与现有的人工检测钢轨接头轨缝宽度的方法相比,本发明能够基于钢轨图像上钢轨接头轨缝的灰度特性自动检测钢轨接头轨缝区域,基于边缘检测技术自动识别钢轨接头轨缝的上边缘和下边缘,并确定钢轨接头轨缝的宽度,提高了钢轨接头轨缝宽度检测的效率和准确性,且易于实现。本发明实现了对钢轨接头轨缝宽度的自动、高效、准确的检测,为轨道的养护维修提供了可靠的依据。
本领域内的技术人员应明白,本发明的实施例可提供为方法、系统、或计算机程序产品。因此,本发明可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本发明可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、CD-ROM、光学存储器等)上实施的计算机程序产品的形式。
本发明是参照根据本发明实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明实施例可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 钢轨接头轨缝宽度的检测方法及装置
- 一种轨缝宽度控制装置