一种综合管廊人物自动跟随的管控方法、系统以及存储介质
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及综合管廊技术,具体涉及综合管廊的管理技术。
背景技术
综合管廊是建于城市地下的将电力、通讯、燃气、供热、给排水等各种工程管线集于一体的隧道空间,具有避免道路反复开挖、优化利用土地资源、管线敷设扩容方便、延长管线使用寿命等优点。为充分保障管廊内环境安全,需要对其内部环境和设备进行自动化数据采集和监控,也需要人工巡检和维修辅助。如申请号201810416131.6的中国发明专利申请,公开了一种地下管廊综合智慧运维管理系统,其提出了一种包含数据中心、用户终端、管廊监控中心和客户终端的运维管理系统,其中用户终端包括定位模块、巡检信息确认模块和维修信息录入模块。
针对综合管廊地下密闭场景下GPS等卫星导航应用失灵的情况,如专利号201721418371.7的中国实用新型专利,公开了一种基于Wi-Fi的综合管廊人员定位装置,其提出了利用无线AP及无线Wi-Fi实现综合管廊内部人员定位的技术方案。
现有技术方案在实际操作过程中只能获取巡检人员的信息用于监控中心的管理,缺乏在获取人员定位信息后为巡检人员提供精确支持、帮助和保护的方案,如灯光和通风等的自动跟随,即人员进入某个区域时,灯光、通风和视频等设备自动提前开启,人员离开时自动延后关闭,实现智能运维和节能运维。
发明内容
针对现有综合管廊的控制方案所存在的问题,本发明的目的在于提供一种综合管廊人物自动跟随的管控方法,实现综合管廊的智能运维和节能运维;据此,本发明还进一步提供一种综合管廊人物自动跟随管控系统,以及存储介质。
为了达到上述目的,本发明提供的综合管廊人物自动跟随的管控方法,包括:
区域划分与设备映射,根据综合管廊内各类设备的覆盖范围,建立综合管廊内部区域划分的划分区域集合和各类设备集合之间的映射关系;
区域与设备搜索,根据接收到的定位信息在综合管廊划分好的划分区域集合中进行遍历搜索,判定坐标所位于的综合管廊内划分好的划分区域,并从区域集合和各类设备集合之间的映射关系中搜索到所对应的设备;
设备启停管控,根据收索到的区域和/或设备,生成对应的设备启停控制指令。
进一步的,所述管控方法进行区域划分与设备映射时,包括:
首先根据综合管廊内各类设备的覆盖范围,将综合管廊内部划分为对应的不相交的多个多边形区域;
然后将每类设备中每台设备所属的多边形区域划分为不相交的多个三角形区域,形成覆盖综合管廊内部全部区域的若干三角形区域组成的划分区域集合,并建立每类设备集合和综合管廊内部区域划分的划分区域集合之间的映射关系。
进一步的,对于映射到同一台设备的多个划分区域,将多个划分区域分为两类,将与其它设备所属划分区域相邻的划分区域定义为边缘区域,其它区域定义为核心区域。
进一步的,所述管控方法进行区域与设备搜索时,首先根据接收到的定位信息在综合管廊划分好的划分区域集合中进行遍历搜索,判定坐标所位于的三角形划分区域;然后从每类设备集合和划分区域集合之间的映射关系中搜索定坐标所位于的三角形划分区域对应的设备,以及该区域的分类。
进一步的,在判定坐标所位于的三角形划分区域时,
将每个三角形区域的三个顶点记为A、B、C,若满足如下三个条件:
1)坐标点P和点C在直线AB同侧;
2)坐标点P和点B在直线AC同侧;
3)坐标点P和点A在直线BC同侧;则可判定坐标点P位于三角形区域内。
为了达到上述目的,本发明提供的综合管廊人物自动跟随的管控系统包括:
区域划分与设备映射模块,所述区域划分与设备映射模块根据综合管廊内各类设备的覆盖范围,建立综合管廊内部区域划分的划分区域集合和各类设备集合之间的映射关系;
区域与设备搜索模块,所述区域与设备搜索模块获取定位信息,并根据接收到的定位信息在区域划分与设备映射模块划分好的划分区域集合中进行遍历搜索,判定坐标所位于的综合管廊内划分好的划分区域,并从区域集合和各类设备集合之间的映射关系中搜索到所对应的设备;
设备启停管控模块,所述设备启停管控模块根据区域与设备搜索模块所收索到的区域和/或设备,生成对应的设备启停控制指令。
进一步地,所述区域划分与设备映射模块包括区域划分子模块和映射子模块;
所述区域划分子模块根据综合管廊内各类设备的覆盖范围,将综合管廊内部划分为对应的不相交的多个多边形区域;并将每类设备中每台设备所属的多边形区域划分为不相交的多个三角形区域,针对每类设备分布分别形成覆盖综合管廊内部全部区域的若干三角形区域组成的划分区域集合;
所述映射子模块根据所述区域划分子模块针对每类设备所形成的划分区域集合,建立每类设备集合和综合管廊内部区域划分的划分区域集合之间的映射关系。
进一步地,所述区域与设备搜索模块包括区域定位子模块和设备搜索子模块;所述区域定位子模块根据接收到的定位信息在区域划分与设备映射模块划分好的划分区域集合中进行遍历搜索,判定坐标所位于的三角形划分区域;
所述设备搜索子模块根据区域定位子模块所确定划分区域,从每类设备集合和划分区域集合之间的映射关系中搜索定坐标所位于的三角形划分区域对应的设备,以及该区域的分类。
为了达到上述目的,本发明提供的存储介质,所述存储介质包括存储的程序,所述程序执行上述的管控方法。
本发明所提供的合管廊管理方案,可实现综合管廊内灯光、通风、视频等设备对运维人员的自动跟随管理,如设备提前开启和延后关闭等等,实现了智能运维和节能运维,可有效克服现有技术所存在的问题。
本发明所提供的合管廊管理方案在具体实施时,可适应综合管廊区域不规则的情形下的自动跟随。
本发明所提供的合管廊管理方案在具体实施时,可适应多个运维人员同时进入管廊的自动跟随。
附图说明
以下结合附图和具体实施方式来进一步说明本发明。
图1为本发明实例中有选择特性的样本或集合间契合程度的统一度量流程示例图;
图2为本发明实例中有选择特性的样本或集合间契合程度的统一度量系统的组成示例图;
图3为本发明实例中一种应用示例示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明。
针对现有综合管廊的管控方案无法实现人物自动跟随管控的问题,本发明给出一种综合管廊人物自动跟随的管控方案,其可实现综合管廊内灯光、通风、视频等设备对运维人员的自动跟随管理,如设备提前开启和延后关闭等等,实现综合管廊智能运维和节能运维。
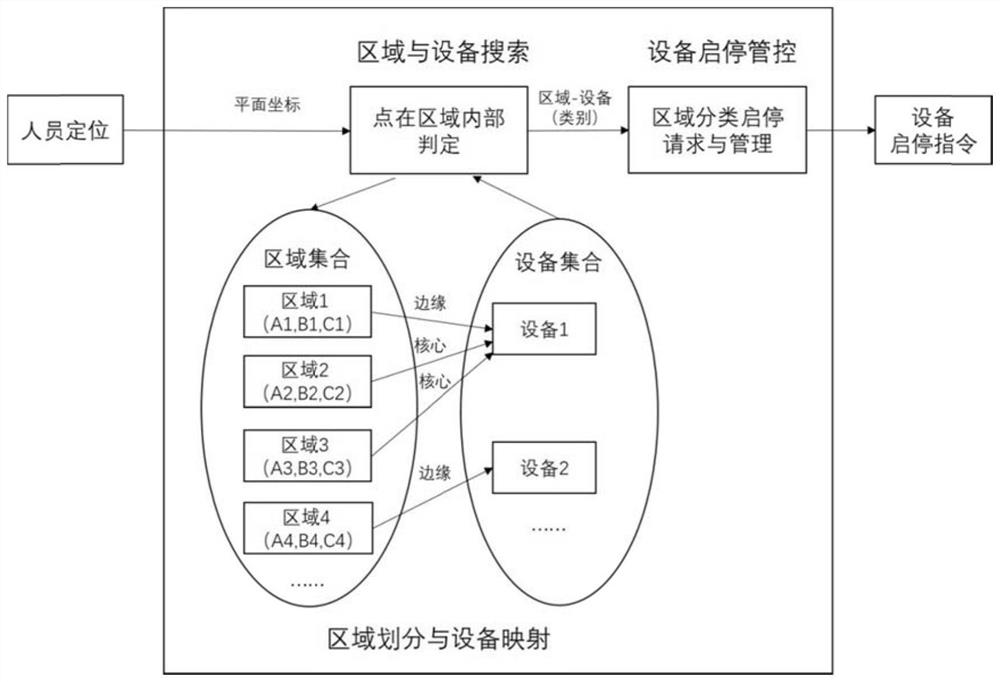
如图1所示,其所示为本综合管廊人物自动跟随的管控方案的构成原理示例图。由图可知,本管控方案主要由区域划分与设备映射、区域与设备搜索以及设备启停管控三部分配合构成。
本方案首先针对综合管廊内的区域进行区域划分与设备映射,根据综合管廊内各类设备的覆盖范围,建立综合管廊内部区域划分的划分区域集合和各类设备集合之间的映射关系。
具体的,本方案针对综合管廊内进行区域划分与设备映射时,首先根据某类设备的覆盖范围,将综合管廊内部划分为不相交的多个多边形区域。
然后,将该类设备各自所属的区域划分为不相交的多个三角形区域,由此形成针对该类设备的覆盖综合管廊内部全部区域的众多三角形区域组成的划分区域集合D。
然后,建立每类设备集合和综合管廊内部区域划分的划分区域集合之间的映射关系。
如此,作为举例,针对某类设备集合M(包括若干台设备m),如通风机集合,将综合管廊内部全部区域划分形成对应若干三角形区域d组成的划分区域集合D;这样使得划分区域集合D中每个三角形区域d均对应着一台设备m。
由于划分区域集合D中每个三角形区域d均对应着一台设备m,则可据此建立一个综合管廊内部区域划分D和该类设备集合M的映射。
由此形成的映射关系中,同一台设备m可对应多个三角形区域d1,d2,…,dk。对此,本方案将映射到同一台设备m的多个区域d1,d2,…,dk,分为两类,若区域di与其它设备所属区域相邻,则将其定义为边缘区域,否则将其定义为核心区域。
本方案针对综合管廊内区域完成划分,并建立每类设备集合和综合管廊内部区域划分的划分区域集合之间的映射关系后,进行区域与设备搜索。
在进行区域与设备搜索时,本方案根据接收到的定位信息在综合管廊划分好的划分区域集合中进行遍历搜索,判定坐标所位于的综合管廊内划分好的划分区域,并从区域集合和各类设备集合之间的映射关系中搜索到所对应的设备。
具体的,首先从外部接收人员定位坐标信息P,根据该定位信息P在综合管廊划分好的区域集合D中进行遍历搜索,直到判定坐标信息P对应的坐标点位于对应的三角形区域d内;
然后从所确定的D到M的映射中搜索到区域d对应的设备m,以及该区域的分类,即核心或边缘(其分类标准和过程如上所述)。
作为举例,本方案中在判定位坐标信息P所对应坐标点位于三角形区域d内时采用如下方法:
将三角形区域d的三个顶点记为A、B、C,若满足如下三个条件:
1)坐标点P和点C在直线AB同侧;
2)坐标点P和点B在直线AC同侧;
3)坐标点P和点A在直线BC同侧。则可判定坐标P位于三角形区域d内。
本方案在完成区域与设备搜索后,则进行设备启停管控,根据收索到的区域和/或设备,生成对应的设备启停控制指令。
具体的,本方案根据区域与设备搜索的结果,将形成人员W-设备m-所在区域类别C三者对应的数据。
这具体可基于人员实时的定位坐标信息P来确定,通过定位坐标信息P可确定人员W此时所处区域,基于该区域可确定,其所对应的设备m;再确定设备m后,即可基于该设备m之前划定的区域集合,确定该区域的类别C。
如人员1-风机2(核心)代表运维人员1在风机设备2的覆盖区域内,且该区域分类为核心。
据此数据,本实例按照如下的启停请求生成规则和启停控制规则,生成设备启停控制指令。
作为举例,本实例中的运维人员W启停请求生成规则如下:
1)若类别C为边缘,则生成一个运维人员W对于设备m的开启请求;
2)若类别C为核心,则生成一个运维人员W对于设备m的开启请求,同时撤销W对于其它设备的开启请求;
作为举例,本实例中的设备m启停控制规则如下:
1)对设备m设置启停请求集合T,初始时设备m关停,T为空。T不为空时,发送设备m开启指令,当T为空时,发送设备m关停指令。
2)若设备m收到运维人员W的开启请求,则将该运维人员W加入设备m的请求集合T。
3)若设备m收到运维人员W的开启请求撤销时,则将设备m的请求集合T中删除该请求人员W。
如此形成的启停请求生成规则和启停控制规则,能够有效保证对相关设备控制的实时性,从而保证人物自动跟随运行的可靠性。
在此原理方案的基础上,本方案构建了一套综合管廊人物自动跟随的管控系统,以实现综合管廊内灯光、通风、视频等设备对运维人员的自动跟随管理。
本综合管廊人物自动跟随的管控系统主要由区域划分与设备映射模块,区域与设备搜索模块,以及设备启停管控模块配合构成。
本系统中的区域划分与设备映射模块实现上述的区域划分与设备映射步骤,根据综合管廊内各类设备的覆盖范围,建立综合管廊内部区域划分的划分区域集合和各类设备集合之间的映射关系。
具体的,本区域划分与设备映射模块包括区域划分子模块和映射子模块。
其中,区域划分子模块根据综合管廊内各类设备的覆盖范围,将综合管廊内部划分为对应的不相交的多个多边形区域;并将每类设备中每台设备所属的多边形区域划分为对应的不相交的多个三角形区域,针对每类设备分布分别形成覆盖综合管廊内部全部区域的若干三角形区域组成的划分区域集合。
而映射子模块与区域划分子模块配合,根据区域划分子模块针对每类设备所形成的划分区域集合,建立每类设备集合和综合管廊内部区域划分的划分区域集合之间的映射关系。
本系统中的区域与设备搜索模块实现上述的区域与设备搜索步骤,本区域与设备搜索模块获取对应的定位信息,并根据接收到的定位信息在区域划分与设备映射模块划分好的划分区域集合中进行遍历搜索,判定坐标所位于的综合管廊内划分好的划分区域,并从区域集合和各类设备集合之间的映射关系中搜索到所对应的设备。
具体的,本区域与设备搜索模块主要包括区域定位子模块和设备搜索子模块。其中,区域定位子模块根据接收到的定位信息在区域划分与设备映射模块划分好的划分区域集合中进行遍历搜索,判定坐标所位于的三角形划分区域。与之配合的,设备搜索子模块根据区域定位子模块所确定划分区域,从每类设备集合和划分区域集合之间的映射关系中搜索定坐标所位于的三角形划分区域对应的设备,以及该区域的分类。
本系统中的设备启停管控模块实现上述的设备启停管控步骤。本设备启停管控模块根据区域与设备搜索模块所收索到的区域和/或设备,生成对应的设备启停控制指令。
由此形成的系统在具体实现时,具体可相应的软件程序形式呈现,并可存储在相应的存储介质中,这里对于存储介质的构型形式不加以限定。
针对上述方案,以下通过以具体应用实例来进一步说明其实施过程。
如图2所示,其所示为综合管廊的一段,其中有3台风机设备(也可以为其他设备),分别为m1、m2、m3。
据此,本实例构建相应的综合管廊人物自动跟随管控系统,包括相互配合的区域划分与设备映射模块,区域与设备搜索模块,以及设备启停管控模块,由此来实现针对综合管廊内相应设备对运维人员的自动跟随管控。
本管控系统中的区域划分与设备映射模块针对图2所示综合管廊内部结构以及3台相应风机设备分布情况进行区域划分和设备映射时,根据3台风机设备覆盖范围,以及该段综合管廊的形状,将该段综合管廊内部区域划分为13个三角形区域。
同时,针对所划分的13个三角形区域3中每个三角形区域,根据该区域是否与其它设备所属区域相邻,进行核心区域和边缘区域的分类。
由此形成设备m-所在区域类别C的数据,如图3所示,其中1-1(核心)表示该区域编号为1,该区域映射到设备1,且该区域为核心区域。
据此,本管控系统在运行时,系统中的区域与设备搜索模块基于区域划分与设备映射模块所形成划分区域数据和映射数据,基于运维人员的实时定位信息,进行实时区域与设备搜索。如图3所示,若运维人员W位于图3中四角星位置,从外部接收到其定位坐标P。此时,区域与设备搜索模块依次搜索该段综合管廊内的13个三角形区域3,判断P是否位于某个三角形区域内。
参见图3,此时运维人员W的定位坐标P信息如下:
1)点P和点C在直线AB同侧;
2)点P和点B在直线AC同侧;
3)点P和点A在直线BC同侧。
据此,系统可判定P位于三角形区域6-2(边缘)内。
此时,本管控系统中的设备启停管控模块针对区域与设备搜索模块搜索所形成的数据,实时生成对应设备的启停控制指令。
如图3所示,针对位于四角星位置的运维人员W,本系统中的区域与设备搜索模块输出为W-m2(边缘)。
此时,设备启停管控模块接收到区域与设备搜索模块输出的相应数据后,按照设定的运维人员W启停请求生成规则,生成对设备m2的开启请求;按照设定的设备m2启停控制规则,m2的开启请求集合T={W},从而发送设备m2的开启指令。
当运维人员行进至图3中五角星位置时,系统中的区域与设备搜索模块实时判断出运维人员W进入8-2(核心)区域,输出W-m2(核心)。
此时,设备启停管控模块接收到区域与设备搜索模块输出的相应数据后,按照设定的人员W启停请求生成规则,生成对设备m2的开启请求,同时撤销运维人员W对其它设备的开启请求。由于m2的开启请求集合T中已经包含W,因此T不变。
若运维人员W的行进路线是3-1(边缘)→6-2(边缘)→8-2(核心),则运维人员W还存在一个针对设备m1的开启请求,此时需进行撤销,即将m1的开启请求集合删除W,若删除W后m1的开启请求集合为空,按照设备启停控制规则,发送设备m1的关停指令。
由上实例可知,本发明所提供的合管廊管理方案在具体实施时,可适应综合管廊区域不规则的情形下的自动跟随;同时可适应多个运维人员同时进入管廊的自动跟随。
最后,需要说明的,上述本发明的方法,或特定系统单元、或其部份单元,为纯软件架构,可以透过程序代码布设于实体媒体,如硬盘、光盘片、或是任何电子装置(如智能型手机、计算机可读取的储存媒体),当机器加载程序代码且执行(如智能型手机加载且执行),机器成为用以实行本发明的装置。上述本发明的方法与装置亦可以程序代码型态透过一些传送媒体,如电缆、光纤、或是任何传输型态进行传送,当程序代码被机器(如智能型手机)接收、加载且执行,机器成为用以实行本发明的装置。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种综合管廊人物自动跟随的管控方法、系统以及存储介质
- 一种基于RFID的个人物品管控系统及管控方法