一种用于礼品机的丝杆驱动式机械爪及其礼品机
文献发布时间:2023-06-19 10:05:17
技术领域
本发明涉及游艺设备领域,具体涉及一种用于礼品机的丝杆驱动式机械爪及其礼品机。
背景技术
随着生活水平的提高,人们得以体验更多的休闲和娱乐活动,娱乐设备产业也渐渐发展起来。目前,礼品机已遍布各个商场及动漫娱乐场所,顾客只需向礼品机投入一定数量的硬币,即可获得抓取自己喜爱的礼品或奖励的机会。
其中,娃娃机是近年来受到广泛欢迎的一种礼品机。其主要玩法是,将礼品陈列在一个透明的柜子内,柜子内设置一个可控制抓取物品的机器手臂,使用者要凭自己的技术操控机器手臂,以抓取自己想要的礼品。因柜子中放置的礼品大多是毛绒玩具之类的布偶填充玩具,故而也被称为“娃娃机”、“夹娃娃机”或“夹公仔机”。
礼品机中机械手臂末端的机械爪是最为关键的部件。然而现有的机械爪还存在较大的改进空间。机械爪在抓取礼品的时候需要保持微妙的抓力平衡,既要避免抓取力过大造成的抓取难度太低,又要避免抓取力过小造成的抓取难度太大。为了实现这种微妙的抓力平衡,现有礼品机中的机械爪被设计得过于复杂,不仅提高了制造成本,也增加了修理和维护的难度,缩短了使用寿命,亟待进行改进和完善。
发明内容
本发明的目的在于,针对现有技术中存在的问题,提供一种用于礼品机的丝杆驱动式机械爪及其礼品机,其具备结构简单、成本低廉、易于维护的特点,同时能够满足礼品机的抓力平衡要求。
为实现上述目的,本发明采用以下技术方案:
一种用于礼品机的丝杆驱动式机械爪,包括基座,安装于基座上的爪臂和驱动组件,以及罩在基座和驱动组件上方外部的外壳;
所述基座上设有至少2个爪臂安装座,每个爪臂安装座上枢轴连接一爪臂,使得爪臂能够以枢轴连接处为支点摆动;
所述驱动组件包括丝杆电机、电机固定平台和联动平台;所述电机固定平台固定架设于基座的中部上方,所述丝杆电机固定于电机固定平台上,丝杆电机的丝杆向下延伸设置,所述联动平台连接于丝杆电机的丝杆上,由丝杆电机驱动而上下移动;
所述联动平台的侧面设有若干个爪臂联动槽,所述爪臂的一端插入连接于爪臂联动槽内;当联动平台上下移动时,带动爪臂的一端上下移动,进而使爪臂的另一端在基座的下方开合动作。
进一步地,所述联动平台包括上联动块和下联动块;
所述上联动块的轴心处固定连接一丝杆螺母,所述丝杆螺母与丝杆电机的丝杆连接形成丝杆副,使丝杆电机得以驱动上联动块在丝杆上上下移动;所述上联动块的下部嵌套连接于下联动块的轴心处,使得下联动块和上联动块的周向互相固定,且可沿轴向相对移动;上联动块和下联动块之间的轴向,通过弹簧弹性连接;
所述下联动块的侧面设有若干个沿径向开设的爪臂联动槽,所述爪臂联动槽的顶部及径向外侧开口;所述上联动块的侧面设有径向凸出的檐盖,上联动块的檐盖覆盖于下联动块的爪臂联动槽的顶部开口处;
插入连接于爪臂联动槽内的爪臂的一端,其两侧和下方的自由度被下联动块的爪臂联动槽限制,其上方的自由度被上联动块的檐盖限制。
进一步地,所述上联动块和下联动块之间的轴向,通过3个弹簧弹性连接;其中,每个弹簧的上端固定连接于上联动块的檐盖外侧,弹簧的下端固定连接于下联动块的下端外侧。
进一步地,所述上联动块的下部外侧具有沿轴向延伸且沿径向凸出的卡接棱;所述下联动块的轴心处中空,下联动块的轴心处内表面具有沿轴向延伸且沿径向凹陷的卡接槽;所述上联动块的卡接棱沿轴向插入于下联动块的卡接槽内,使上联动块和下联动块的周向相对固定。
进一步地,所述上联动块的顶面具有向上凸起的检测凸块,所述电机固定平台上固定连接有检测光眼,用于检测上联动块顶面的检测凸块的高度位置。
进一步地,所述爪臂安装座有3个,3个爪臂安装座沿基座的边缘,周向均匀分布。
进一步地,所述爪臂安装座上设置有限位片,用于限制爪臂抓合时的最大运动行程;其中至少一个爪臂安装座附近的基座上固定连接有限位片调节装置,用于调节限位片的限位程度。
进一步地,所述爪臂安装座包括安装槽和压块,所述爪臂枢轴连接于安装槽内,可在安装槽内以枢轴连接点为支点摆动;所述压块固定连接于安装槽的上方,以将爪臂限位于安装槽内;所述压块上固定连接一限位片,所述限位片延伸向爪臂与爪臂联动槽的连接处,且斜向上翘起,用于在爪臂摆动时限制爪臂一端的最高运动行程。
进一步地,所述限位片调节装置包括调节螺栓、调节块、第一弹簧和第二弹簧;所述调节螺栓从基座的底面穿过,与调节块螺纹连接;所述第一弹簧套设于调节螺栓上且设置于调节块与基座之间;所述调节块上设有一弹簧槽,所述第二弹簧设置于弹簧槽内,第二弹簧的上端与调节块相抵,第二弹簧的下端与所述限位片的末端相抵;
所述电机固定平台上开设有一限位孔,所述调节块限位连接于所述限位孔内;所述限位孔的轮廓形状与调节块相匹配,用于限制调节块的旋转活动,使得调节块和调节螺栓之间能够互相转动,以调整调节块的高度位置。
一种礼品机,包括以上所述的用于礼品机的丝杆驱动式机械爪。
本发明提供的一种用于礼品机的丝杆驱动式机械爪及其礼品机,其具备结构简单、成本低廉、易于维护的特点,同时能够满足礼品机的抓力平衡要求。
本发明机械爪的内部采用了简单而巧妙的弹性连接结构来驱动爪臂动作,使得爪臂在保持完全抓合状态的情况下还具有一定的微动空间,抓力不会太大也不会太小,能够实现巧妙的抓力平衡,充分满足了礼品机的使用需求。同时,本发明中各部件采用模块化设计,机械爪的拆装及更换过程简单方便,便于进行后期维护和修理。
附图说明
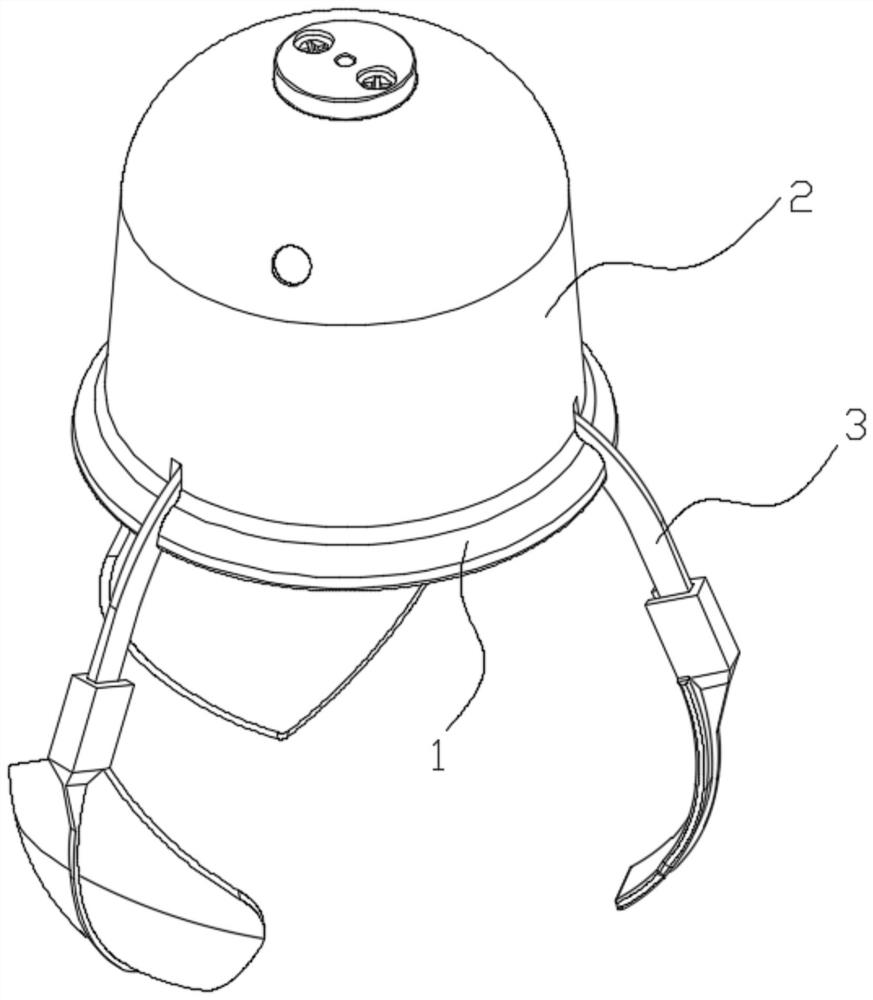
图1是本发明实施例提供的一种用于礼品机的丝杆驱动式机械爪的松开状态结构图。
图2是本发明实施例提供的一种用于礼品机的丝杆驱动式机械爪的抓合状态结构图。
图3是本发明实施例提供的一种用于礼品机的丝杆驱动式机械爪的内部结构示意图。
图4是本发明实施例中的联动平台的结构示意图。
图5是本发明实施例中基座与爪臂的连接结构示意图。
图6是本发明实施例中基座与爪臂的连接结构爆炸图。
具体实施方式
下面将结合附图和具体的实施例对本发明的技术方案进行详细说明。
实施例一
如图1和图2所示,本发明提供的一种用于礼品机的丝杆驱动式机械爪,包括基座1,安装于基座1上的爪臂3和驱动组件,以及罩在基座1和驱动组件上方外部的外壳2。
具体地,结合图3所示,所述基座1上设有至少2个爪臂安装座6,每个爪臂安装座6上枢轴连接一爪臂3,使得爪臂3能够以枢轴连接处为支点摆动。在本发明实施例中,所述爪臂安装座6有3个,3个爪臂安装座6沿基座1的边缘,周向均匀分布;对应地,所述爪臂3也有3个。
其中,所述驱动组件包括丝杆电机4、电机固定平台40和联动平台5;所述电机固定平台40固定架设于基座1的中部上方,所述丝杆电机4固定于电机固定平台40上,丝杆电机4的丝杆41向下延伸设置,所述联动平台5连接于丝杆电机4的丝杆41上,由丝杆电机4驱动而上下移动;
所述联动平台5的侧面设有若干个爪臂联动槽50,所述爪臂3的一端插入连接于爪臂联动槽50内;当联动平台5上下移动时,带动爪臂3的一端上下移动,进而使爪臂3的另一端在基座1的下方开合动作。
结合图4所示,所述联动平台5包括上联动块51和下联动块52。所述上联动块51的轴心处固定连接一丝杆螺母42,所述丝杆螺母42与丝杆电机4的丝杆41连接形成丝杆副,使丝杆电机4得以驱动上联动块51在丝杆41上上下移动;所述上联动块51的下部嵌套连接于下联动块52的轴心处,使得下联动块52和上联动块51的周向互相固定,且可沿轴向相对移动;上联动块51和下联动块52之间的轴向,通过弹簧53弹性连接。
所述下联动块52的侧面设有若干个沿径向开设的爪臂联动槽50,所述爪臂联动槽50的顶部及径向外侧开口;所述上联动块51的侧面设有径向凸出的檐盖511,上联动块51的檐盖511覆盖于下联动块52的爪臂联动槽50的顶部开口处。
通过联动平台5的以上结构,插入连接于爪臂联动槽50内的爪臂3的一端,其两侧和下方的自由度被下联动块52的爪臂联动槽50限制,其上方的自由度被上联动块51的檐盖511限制,使得爪臂3的一端能够随联动平台5移动。
具体地,在本实施例中,所述上联动块51的下部外侧具有沿轴向延伸且沿径向凸出的卡接棱512;所述下联动块52的轴心处中空,下联动块52的轴心处内表面具有沿轴向延伸且沿径向凹陷的卡接槽521;所述上联动块51的卡接棱512沿轴向插入于下联动块52的卡接槽521内,使上联动块51和下联动块52的周向相对固定。
所述上联动块51和下联动块52之间的轴向,通过3个弹簧53弹性连接;其中,每个弹簧53的上端固定连接于上联动块51的檐盖511外侧,弹簧53的下端固定连接于下联动块52的下端外侧。
通过以上结构,本发明实施例中的3个爪臂的开合运动能够藉由丝杆电机4对联动平台5的上下移动控制而实现。由于上联动块51、下联动块52和爪臂3之间互相周向固定,而无法相对转动;当丝杆电机4的丝杆41正向转动时,丝杆螺母42带动上联动块51向上移动,进而带动爪臂3的一端向上移动,使爪臂3以枢轴连接处为支点摆动,实现爪臂3的另一端在基座1下方进行抓合动作;当丝杆电机4的丝杆41反向转动时,丝杆螺母42带动上联动块51向下移动,进而带动爪臂3的一端向下移动,使爪臂3以枢轴连接处为支点摆动,实现爪臂3的另一端在基座1的下方进行松爪动作。
本发明实施例中,当机械爪处于抓合状态时,爪臂3的抓合力实际是由联动平台5上的3个弹簧53控制的,这使得爪臂3的抓合力能够正好处于恰当的平衡状态。具体地,在爪臂3抓合动作的过程中,对爪臂3的一端进行抬升的力实际是由下联动块52直接提供的,而下联动块52上升的力则是通过3个弹簧53间接弹性传动的,下联动块52并不直接与丝杆41连接。基于以上结构,当机械爪抓取物品时,下联动块52为爪臂3的一端留开了一定的弹性下移空间,即为爪臂3的另一端留开了一定的弹性抓取空间,因而在保持完全抓合状态的情况下还具有一定的微动空间,抓力不会太大也不会太小,能够实现巧妙的抓力平衡,满足了礼品机的使用需求。
作为改进,所述上联动块51的顶面具有向上凸起的检测凸块513,所述电机固定平台40上固定连接有检测光眼,用于检测上联动块51顶面的检测凸块513的高度位置。通过测定检测凸块513的高度位置,即可进一步确定各爪臂3是否达到完全抓合状态。
结合图5和图6所示,本发明实施例中,所述爪臂安装座6上设置有限位片63,用于限制爪臂3抓合时的最大运动行程;其中至少一个爪臂安装座6附近的基座1上固定连接有限位片调节装置7,用于调节限位片63的限位程度。
具体地,所述爪臂安装座6包括安装槽61和压块62,所述爪臂3枢轴连接于安装槽61内,可在安装槽61内以枢轴连接点为支点摆动;所述压块62固定连接于安装槽61的上方,以将爪臂3限位于安装槽61内;所述压块62上固定连接一限位片63,所述限位片63延伸向爪臂3与爪臂联动槽50的连接处,且斜向上翘起,用于在爪臂3摆动时限制其与爪臂联动槽50连接端的最大运动行程。
进一步地,所述限位片调节装置7包括调节螺栓71、调节块72、第一弹簧73和第二弹簧74;所述调节螺栓71从基座1的底面穿过,与调节块72螺纹连接;所述第一弹簧73套设于调节螺栓71上且设置于调节块72与基座1之间;所述调节块72上设有一弹簧槽,所述第二弹簧74设置于弹簧槽内,第二弹簧74的上端与调节块72相抵,第二弹簧74的下端与所述限位片63的末端相抵。所述电机固定平台40上开设有一限位孔70,所述调节块72限位连接于所述限位孔70内;所述限位孔70的轮廓形状与调节块72相匹配,用于限制调节块72的旋转活动,使得调节块72和调节螺栓71之间能够互相转动,以调整调节块72的高度位置。
当机械爪运行到完全抓合状态时,爪臂3与限位片63相抵而无法继续摆动,实现了最大行程的限位。并且,第二弹簧74使爪臂3在运行到最大行程时还具有一定的缓冲,避免了爪臂3与限位部件的刚性碰撞。
具体来说,当从基座1的下方旋拧调节螺栓71时,由于调节块72受限电机固定平台40上的限位孔70的限位作用而无法转动,导致调节块72得以在调节螺栓71上上下移动;在调节块72上下移动的过程中,第一弹簧73能够将调节块72和基座1之间的距离撑开,便于实现微调,而第二弹簧74则能够将限位片63进行不同程度的下压,实现了限位高度的调节。
实施例二
本发明还提供了一种礼品机,包括实施例一所述的用于礼品机的丝杆驱动式机械爪。具体地,所述礼品机具有一柜体,所述柜体内部的顶面设有移动平台,所述丝杆驱动式机械爪安装于移动平台上。所述柜体内部的底面设有礼品通道;所述柜体的外部设有操作台,操作台上设有按钮和摇杆,所述按钮和摇杆通过控制电路与丝杆驱动式机械爪连接,用于控制丝杆驱动式机械爪在移动平台上移动并从柜体内部抓取礼品投入礼品通道内。
本发明提供的一种用于礼品机的丝杆驱动式机械爪及其礼品机,其具备结构简单、成本低廉、易于维护的特点,同时能够满足礼品机的抓力平衡要求。
本发明机械爪的内部采用了简单而巧妙的弹性连接结构来驱动爪臂动作,使得爪臂在保持完全抓合状态的情况下还具有一定的微动空间,抓力不会太大也不会太小,能够实现巧妙的抓力平衡,充分满足了礼品机的使用需求。同时,本发明中各部件采用模块化设计,机械爪的拆装及更换过程简单方便,便于进行后期维护和修理。
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
- 一种用于礼品机的丝杆驱动式机械爪及其礼品机
- 一种用于礼品机的电磁驱动式机械爪及其礼品机