一种用于机场行李集装箱搬运的AGV及搬运方法
文献发布时间:2023-06-19 10:10:17
技术领域
本发明属于工业车辆运输领域,适用于民用机场行李集装箱物流运输车辆,具体涉及一种用于机场行李集装箱搬运的AGV及搬运方法。
背景技术
目前随着移动机器人技术的发展,AGV在各行各业中得到了广泛运用,是工厂及仓储物料搬运自动化的主要设备之一。近年来,巨大的客、货运体量给机场物流运输作业带来了沉重的压力,依赖人工驾驶的传统机场物流作业方式面临诸多挑战;AGV的自动搬运作业方式可以一定程度解决传统机场物流劳动力紧缺及用工成本高的难题,降低机场行李物流运营的安全风险,并且可起到提高机场物流运作效率。
中国发明专利(201910020762.0)一种城市知己行李集装箱装卸车系统及装卸方法。公开了一种先采用升降机构将集装箱抬高高输送系统相通的平面上,依靠输送系统将水平移动装置的货物取出,运输。该系统需要靠运输系统和AGV小车的共同作用将货物取出,系统结构复杂,需要外部动力协助AGV小车进行存取;且从AGV小车上取下集装箱时,需要依靠外力对集装箱进行拖拽,回使集装箱内的物品产生位移,可能造成物品损害。
发明内容
本发明的目的旨在克服现有技术存在的不足,提供一种不需要依靠外部动力设备进行存取操作,能全方位行驶且行驶、转向、举升稳定、停位精度高的举升梳齿式AGV。
为实现上述目的,本发明采用如下技术方案来实现:
一种用于机场行李集装箱搬运的AGV,包括AGV车体,其特征在于,还包括安装在AGV车体上的举升机构和控制系统,以及设置在 AGV车体下方的差速车桥式驱动装置,所述举升机构、差速车桥式驱动装置与控制系统电连接。
进一步地,所述AGV车体包括车本体;
还包括与所述举升机构活动连接的梳齿架;
所述举升机构包括安装在梳齿架底面的多个导杆和安装在底座上的与导杆适配的多个直线轴承,所述导杆穿过直线轴承连接,所述导杆可沿直线轴承做上下运动。
所述举升机构包括安装在车本体内的底座以及安装在底座上的若干个丝杠螺母机构,若干个丝杠螺母机构之间通过连接轴连接,所述导杆上安装有驱动装置,所述驱动装置与控制系电连接;所述驱动装置可带动连接轴转动,从而驱动丝杠螺母机构进行升降操作。
进一步地,所述举升机构为对称设置,包括成对的丝杠螺母机构和成对的连接轴。
进一步地,所述AGV车体上还设置有导引传感器、AGV停位开关和货物到位开关;所述导引传感器、AGV停位开关和货物到位开关与控制系统连接;
所述控制系统通过导引传感器、AGV停位开关和货物到位开关实现AGV车体行走、停位及货物的举升到位的精确控制。
进一步地,还包括与梳齿架适配的集装箱站台。
进一步地,所述集装箱站台为对称结构,中间有AGV车体进出通道,顶部设置有梳齿通道,所述梳齿通道与梳齿架形状适配,所述集装箱站台底部高度可供AGV车体通过,所述集装箱站台顶部低于举升机构升起时梳齿架底面。
进一步地,所述车本体通过设置在其下方的悬挂机构与差速车桥式驱动装置连接。
本发明还提供了一种采用用于机场行李集装箱搬运的AGV的搬运机场行李集装箱的方法,其特征在于,所述集装箱搬运的AGV由控制系统控制完成行进、举升、停靠操作;包括:
存放集装箱时
首先将集装箱放置在集装箱搬运的AGV的梳齿架上,集装箱搬运的AGV行进到控制系统指定的集装箱站台前,然后举升机构将梳齿架上升到高于集装箱站台的高度,然后集装箱搬运的AGV行再进入到集装箱站台下方,停在准确的举升定位点;然后举升机构下降,梳齿架穿过集装箱站台,使集装箱放置在集装箱站台上,待举升机构下降到位后,完成放置工作;
取送集装箱时首先集装箱搬运的AGV行进到控制系统指定的集装箱站台前,然后集装箱搬运的AGV继续行进到集装箱站台下方,然后停在举升定位点;然后举升机构上升,梳齿架穿过集装箱站台,将集装箱举在梳齿架上,托举到位时,举升机构停止上升,集装箱搬运的AGV运载集装箱驶离集装箱站台并将集装箱运送到指定位置。
工作原理:
从集装箱站台取出集装箱时,所述集装箱搬运的AGV在控制系统的控制下行进到举升定位点,并在检测AGV停位开关的配合下停在指定的升降操作点;通过举升机构向上运动穿过与梳齿架适配的通道,将集装箱托起,在检测货物到位开关的协助下,托举到指定高度,再从集装箱站台的位置驶离,行进到指定位置。
将从集装箱站台取出集装箱进行逆向操作即可将集装箱放置到集装箱站台上。
有益效果:
1、采用梳齿式AGV和集装箱站台配合,结构简单,设置灵活。
2、采用梳齿架,可将集装箱直接放置到集装箱站台上,减少左右移动,确保集装箱内物品安全。
3、采用悬挂机构与差速车桥式驱动装置,使梳齿式AGV运行过程平稳。
4、对称设置的丝杠螺母机构,使梳齿架的受力点均匀。
5、梳齿架与举升机构活动连接,方便维修、更换。
附图说明
图1位本发明的外部结构图。
图2为本发明的侧视图。
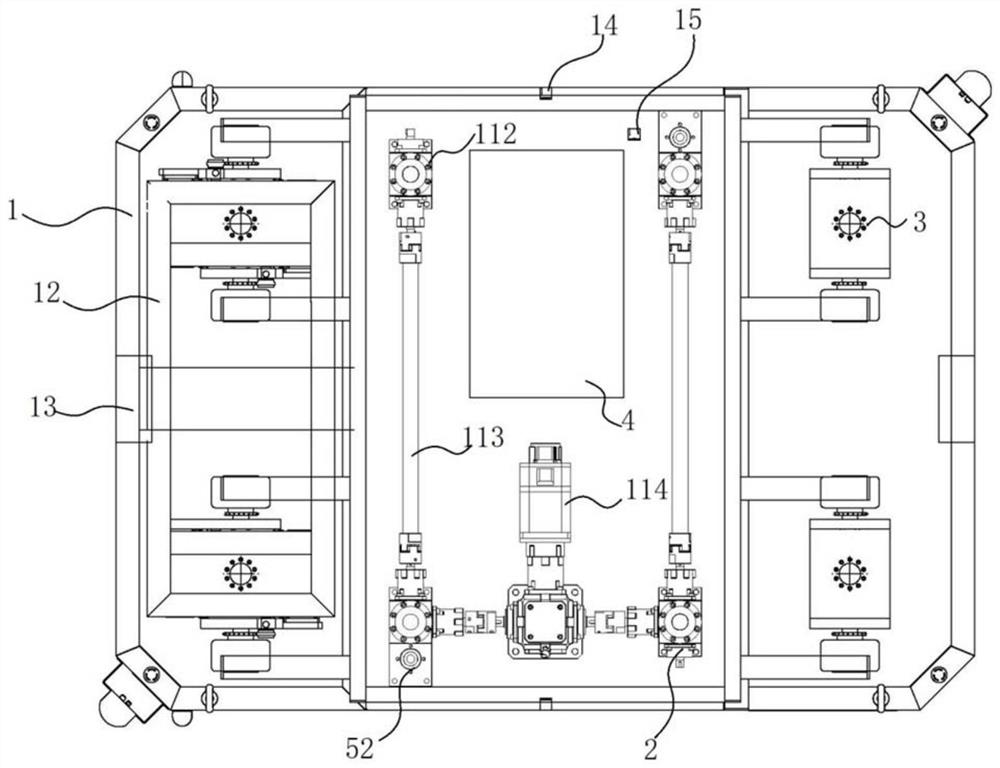
图3为本发明的俯视内部结构图。
图4为举升机构的结构示意图。
图5为集装箱站台的结构示意图。
附图标记:
AGV车体1、举升机构2、差速车桥式驱动装置3、控制系统4、车本体11、悬挂机构12、导引传感器13、AGV停位开关14、货物到位开关15、底座111、丝杠螺母机构112、连接轴113、驱动装置114、梳齿架5、导杆51、直线轴承52、集装箱站台6、梳齿通道61。
具体实施方式
下面结合具体实施例和附图对本发明的技术方案做进一步详细说明,但本发明并不局限于以下技术方案。
实施例
如图1-5所示,一种用于机场行李集装箱搬运的梳齿式AGV,包括AGV车体1、安装在AGV车体1上的举升机构2和控制系统4,与举升机构2活动连接的梳齿架5以及安装在车体下方的差速车桥式驱动装置1143,所述控制系统4与举升机构2、差速车桥式驱动装置 1143连接,控制举升机构2进行举升运动,控制AGV车体1向各个方向运动。
所述AGV车体1包括车本体11,所述差速车桥式驱动装置1143 通过悬挂机构12与车本体11连接,以保持AGV车体1运行平稳。
所述AGV车体1上还包括在AGV车体1的底部设有的四组差速车桥式驱动装置1143,其作用是提供AGV行驶驱动力,使AGV实现前进、后退、横移、自旋等移动功能。四组差速车桥式驱动装置1143 位于同一平面上,是AGV车体1运行时保持平稳。
所述举升机构2包括安装在AGV车体1内的底座111,安装在底座111上的若干个丝杠螺母机构112,若干个丝杠螺母机构112之间通过连接轴113连接,所述连接轴113上安装有驱动装置114,所述驱动装置114与控制系统4连接;所述驱动装置114可带动连接轴 113转动,从而驱动丝杠螺母机构112进行升降操作。
所述举升机构2为对称设置,包括成对的丝杠螺母机构112和成对的连接轴113,
所述集装箱搬运的AGV还包括与举升机构2活动连接的梳齿架5。
所述举升机构2包括安装在梳齿架5底面的多个导杆51和安装在底座111上的与导杆51适配的多个直线轴承52,所述导杆51穿过直线轴承52连接,所述导杆51可沿直线轴承52做上下运动。
所述举升机构2带动车体顶部梳齿架5上下运动,实现货物的举升移载功能。
所述AGV车体1下部两侧设置有AGV导引传感器13;所述AGV 车体1前进方向的一侧设置有停位开关;所述AGV车体1顶部设置有检测货物到位开关15;所述导引传感器13、AGV停位开关14和检测货物到位开关15与控制系统4电连接。
所述控制系统4通过导引传感器13、AGV停位开关14和检测货物到位开关15实现AGV行走、停位及货物的举升到位的精确控制。
所述梳齿式AGV还包括与梳齿架5适配的集装箱站台6;所述集装箱站台6为对称结构,中间有AGV车体1进出通道,下方高度可供梳齿式AGV穿过,顶部设置有梳齿通道61,所述梳齿通道61与梳齿架5形状适配,所述集装箱站台6底部高度可供AGV车体1通过,所述集装箱站台6顶部低于举升机构2升起时梳齿架5底面。当梳齿式 AGV举升时,所述梳齿架5可从集装箱站台6的梳齿通道61中穿过,将集装箱从集装箱站台6上托起,并可从一侧将集装箱运出。
工作方式:
将集装箱放置集装箱站台6上时,首先将集装箱放置梳齿式AGV 的梳齿架5上;通过导引传感器13的反馈信息,在控制系统4的控制下梳齿式AGV行进到系统指定的集装箱站台6前,此时控制系统4 控制举升机构2将梳齿架5上升到最高处且高于集装箱站台6的高度时,控制系统4控制梳齿式AGV行进到集装箱站台6下方,在AGV停位开关14的协助下停在准确的举升定位点;然后举升机构2下降,使梳齿架5穿过集装箱站台6,将集装箱留在集装箱站台6上方;待举升机构2下降到位后,完成放置工作。
将集装箱从集装箱站台6上取时,通过导引传感器13的反馈信息,在控制系统4的控制下梳齿式AGV行进到系统指定的集装箱站台6前,控制系统4控制梳齿式AGV继续行进到集装箱站台6下方,在AGV停位开关14的协助下停在准确的举升定位点;然后举升机构2上升,使梳齿架5穿过集装箱站台6,将集装箱留托举在梳齿架5上上方,检测货物到位开关15检测到位时,举升机构2停止上升;梳齿式AGV 驶离集装箱站台6将集装箱运送到指定位置。
- 一种用于机场行李集装箱搬运的AGV及搬运方法
- 一种用于机场行李的搬运机器人及其控制方法