基于摩擦效应的变形可控的仿生关节及其制备方法和应用
文献发布时间:2023-06-19 10:11:51
技术领域
本发明属于结构仿生相关技术领域,更具体地,涉及一种基于摩擦效应的变形可控的仿生关节及其制备方法和应用。
背景技术
现有的仿生关节大多采用轴承、弹簧、连杆等硬件结构进行设计,结构复杂,且大多需要与外部的控制设备配合使用,与人体结构的兼容性差。即使在临床医疗领域,虽然已存在人造骨骼、各类腔内支架、血栓过滤器、栓塞器等与人体兼容的仿生结构,但该类结构一般都较为简单,例如人造骨骼,其只能仿生单段骨骼不能仿生相互连接可以弯曲的多段骨骼,且大多数仿生结构都是接收的外部刺激形变,因此需要在仿生结构的外部设置一定的环境条件,大大限制了仿生结构的应用范围和发展,即使是内部加热刺激,也仅仅能单点刺激变形而无法实现多段定点变形,现有设计不能满足多段变形需求,尤其在仿生关节领域,例如,仿生手指,常常为多关节结构,需要内部的主动控制实现弯曲,而不是受外界刺激,因此,基于上述问题,亟需设计一种可以从内部主动控制多段变形的仿生关节。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种基于摩擦效应的变形可控的仿生关节及其制备方法和应用,通过设置一组或多组依次贯通连接的升温段、变形段和降温段来仿生一个或多个关节,升温段基于摩擦效应实现升温,无需升温设备即可实现温升,在有多个关节时,变形段流出的流体经过降温段降温可以降低流体的温度不至于流体温度随着后续流动一直升高而使得后续的变形段只能变形,而不能实现部分变形段变形而部分变形段不变形的目的,从而实现仿生关节中多变形段不同的变形需求,使得仿生关节可以被主动控制。
为实现上述目的,按照本发明的一个方面,提供了一种基于摩擦效应的变形可控的仿生关节,所述仿生关节包括至少一组依次贯通连接的升温段、变形段和降温段,其中,所述变形段的材料为形状记忆合金,所述升温段的内壁为隔热材料,所述降温段的材料为导热材料,流体经所述升温段由于摩擦效应温度升高至所述变形段的变形温度,以使流体流经所述变形段时使所述变形段变形,从所述变形段流出的流体经所述降温段散热降温。
优选地,所述隔热材料为橡塑海绵或聚乙烯。
优选地,形状记忆合金为镍钛形状记忆合金或铜基记忆合金。
优选地,所述升温段的管径为5-20mm。
优选地,所述降温段内的流道的截面面积大于所述升温段内流道的截面面积。
优选地,所述升温段、变形段和降温段内流道的截面形状为圆形。
按照本发明的另一方面,本申请提供了一种上述基于摩擦效应的变形可控的仿生关节的制备方法,采用增材制造技术制备所述仿生关节。
按照本发明的再一方面,本申请提供了一种上述基于摩擦效应的可控变形区的仿生关节的应用,所述仿生关节应用于仿生手指、仿生手臂、仿生脊椎或仿生腿中。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的基于摩擦效应的变形可控的仿生关节及其制备方法和应用至少具有如下有益效果:
1.采用一组或多组贯通连接的升温段、变形段和降温段仿生一个或多个关节,具有预设初始温度的流体流经升温段内部时由于摩擦效应升温不需要外加热源即可升温至变形段的变形温度,从变形段输出的流体被降温段降温,该降温段可以控制散热量进而可以将温度控制进入下一关节的初始温度,使得下一关节的变形状态可控制;
2.多个升温段的长度可以相同也可以不相同,可以控制各升温段的升温量,多个降温段的长度可以相同也可以不相同一方面可以通过长度控制散热量,另一方面可以对关节的长度进行调节,满足关节的长度要求;
3.当要仿生多个关节时,由于各变形段的变形临界温度,降温段的导热系数和长度均可以控制,因此可以灵活组合出符合要求的多种规格的关节;
4.升温段、变形段和降温段的截面形状优选为圆形有利于流体流动,使得流动在管道周壁的摩擦效应均匀,进而使得关节的各方面均匀受热或冷却;
5.降温段的截面面积大于所述升温段的截面面积,一方面可以存储大量流体使得流入的高温流体可以与其中的流体混合快速降至下一关节所需的初始温度,还可以作为关节的主要支撑部件,起到支撑的作用;
6.本申请所用材料简单,成本低廉,对人体没有毒害,可以用于人体关节的替代;
7.采用增材制造技术制备该仿生结构,便于实现多种复杂形状的成形,成形精度高。
附图说明
图1示意性示出了根据本公开实施例的基于摩擦效应的变形可控的仿生关节的立体图;
图2示意性示出了根据本公开实施例的基于摩擦效应的变形可控的仿生关节的主视图;
图3示意性示出了根据本公开实施例的单组升温段、变形段和降温段的结构图;
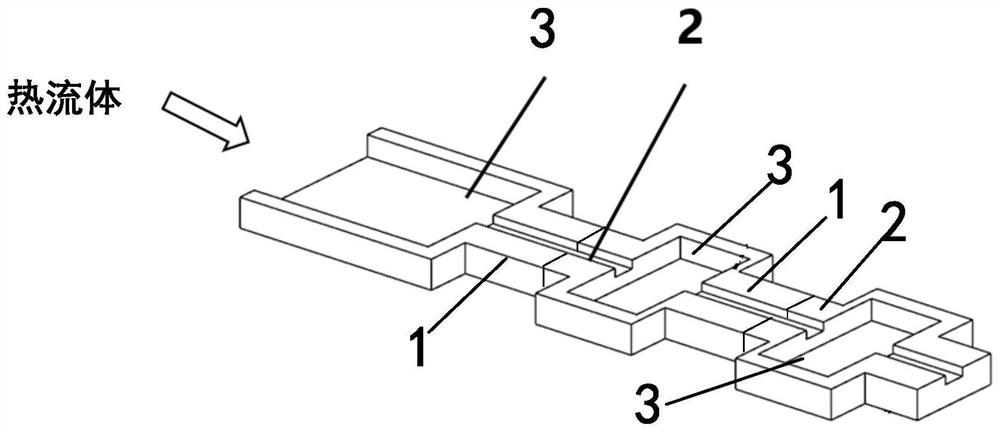
图4示意性示出了根据本公开实施例的具有多组升温段、变形段和降温段的仿生关节的结构图;
图5示意性示出了根据本公开实施例的图4中所示仿生关节变形后的结构示意图。
在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
1-升温段,2-变形段,3-降温段,a-未变形区,b-变形区。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
传统的基于NiTi形状记忆合金的仿生手指、仿生臂等仿生关节都是采用外部致动的方式,而本申请采用的是内部致动的方法,通过控制仿生关节内部的温度实现对仿生关节变形的控制。
请参阅图1及图2,本发明提供了一种基于摩擦效应的变形可控的仿生关节,所述仿生关节包括一组或多组依次贯通连接的升温段1、变形段2和降温段3,进而可以仿生一个或多个关节,升温段1、变形段2和降温段3内部贯通的通道可以通入流体,例如,水、油等。
其中,所述变形段2的材料为形状记忆合金,所述升温段1的内壁为隔热材料,例如,可以为橡塑海绵、聚乙烯等常用的保温材料,且其管壁较小,一般优选为5-20mm,该范围内摩擦附着效应明显,流体升温较为明显;所述降温段3的材料为导热材料,可以向外界散热,使得流体降温。因此,流体经所述升温段1由于摩擦效应温度升高至所述变形段2的变形临界温度,以使流体流经所述变形段2时使所述变形段2变形以仿生关节的弯曲,从所述变形段2流出的流体经所述降温段3散热降温。
当所述仿生关节包括多组依次贯通连接的升温段1、变形段2和降温段3时。多个降温段3的长度和导热系数可以相同也可以不相同,使得降温段3的散热量可以通过长度和导热系数控制,进而可以控制进入下一组关节时流体的初始温度。多个变形段2的形状记忆合金的组分可以相同(例如,均为NiTi形状记忆合金)也可以不同(例如,可以为CuZnAl、CuAlMn等相转变温度较低的形状记忆合金),所以各变形段2的变形温度可以相同也可以不相同。由于各变形段的变形临界温度,降温段的导热系数和长度均可以控制,因此可以灵活组合出符合要求的多种规格的关节。
升温段1的内部管壁为绝热材料,可以根据如下公式确定升温段1的临界长度:
T=ΔT·l+T
其中,T
所述降温段3内的流道的截面面积优选大于所述升温段1的截面面积。一方面可以存储大量流体使得流入的高温流体可以与其中的流体混合快速降至下一关节所需的初始温度,还可以作为关节的主要支撑部件,起到支撑的作用。
升温段、变形段和降温段内部流道的截面形状可以为圆形、方形或多边形,本公开实施例中优选为圆形,有利于流体在周壁上的摩擦效应均匀,进而使得关节的各方面均匀受热或冷却。
如图4所示,由三组升温段、变形段和降温段连接的一仿生关节,该仿生关节可以用于仿生手指,仿生臂等,在实际的应用中具体的可以根据所需的变形区设置升温段、变形段和降温段的组数。
本申请可以根据不同通道截面面积、长度、导热系数等的组合来改变通入流体的初始温度。如在特定面积或特定面积的比例的组合下得到的温度升高较大,那么通入的流体的初始温度可低于变形段的变形温度较多;相反如果在特定面积或面积的比例的组合下得到的温度升高较小,那么通入的流体的初始温度可稍低于变形段的变形温度,即通入的流体的初始温度即需要接近变形段的变形温度区间。如图5所示,a为未变形段,b为变形段,通过调节热流体的初始温度可以实现变形段的全部变形,也可以调节热流体的初始温度,或升温段、散热段的长度和导热系数使得部分变形段变形,另一部分变形段不进行变形。
以上所述制备的基于摩擦效应的变形可控的仿生关节可以用于仿生手指,也可以是一些其他的可弯曲的结构,如仿生手臂、仿生腿等,具体可以由升温段、变形段和降温段的组数来进行设置。
实施例
本公开实施例为手臂肘关节的仿生,由于肘关节为一个直段连接一个弯曲段又连接一个直段,因此,使用一组升温段、变形段和降温段即可。升温段长度为手臂大臂的长度,降温段为手臂小臂的长度。内部流体为水,变形段的材料为NiTi形状记忆合金,由于NiTi形状记忆合金的相转变温度随着成分配比和工艺参数等变化较大,此处取材料的变形临界温度为80℃(具体数值由成分配比和工艺参数确定)。综合考虑管径对单位升温量的影响和初始水温,例如,管径优选为15mm,单位升温量为0.16℃/cm,在确定的大臂长度为200mm的情况下可以获得水在整个升温段的升温量为3.2℃,进而根据变形临界温度计算获得初始水温的最低值为76.8℃。因此,此时只需通入初始温度大于或等于76.8℃的水即可使得变形段出现弯曲变形,实现对手臂肘关节的仿生。
实施例
本公开实施例为脊椎关节的仿生,由于脊椎关节可以近似为多段相同长度的关节相连,因此,可以使用多组相同的升温段、变形段和降温段连接而成,多个关节中,升温段、变形段、降温段、升温段、变形段、降温段……依次连接,因此两变形段之间连接降温段和升温段,这时需要合理分配二者的长度,使得降温段可以达到一定降温量的需求,升温段又可以满足升温需求,例如,若降温段和升温段的总长是4cm,则降温段可以设置为1cm,降温幅度为2℃,升温段长度为3cm,升温幅度为2℃,则根据该参数要求设置升温段的管径和摩擦系数以及降温段的导热系数,例如,当该升温段的管径为20mm,每米长水管的每米长水管的摩擦阻力8049pa/m,降温段的导热系数为λ=15.24W/(m.K)。若变形段的材料为NiTi形状记忆合金,此处取材料的临界变形温度为75℃(具体数值由成分配比和工艺参数确定),则初始温度设置为73℃以上即可实现流体经升温段升温后到达变形段时的温度为75℃以上,进而实现脊椎关节的弯曲仿生。
实施例
本公开实施例为食指关节的仿生,该关节具有两个弯曲点,因此需要两组升温段、变形段和降温段,且两组中的升段段和降温段的长度不同,为描述方便将食指的三个直段依次命名为长段、中段和短段,长段和中段之间设置有变形段,中段和短段之间设置有变形段,长段的长度为5cm,中段的长度为3cm,短段的长度为1.5cm,长段为起始端,可以全部设置为升温段,也可以设置为降温段连接升温段,本实施例中全部设置为升温段,流体需要在5cm的长度内升温至变形段的变形临界温度,变形段的材料为CuZnA1,由于CuZnA1形状记忆合金的相转变温度随着成分配比和工艺参数等变化较大,此处取材料的变形临界温度为50℃(具体数值由成分配比和工艺参数确定),升温段的管径为15mm,每米长水管的摩擦阻力为12037pa/m,因此在5cm内的升温量为0.8℃,因此需要的初始温度为49.2℃;中段包括降温段和升温段,降温段的长度为1cm,降温量为1℃,升温段的长度为2cm,此段连接的变形段的材料为CuZnAl,变形临界温度为50℃,因此需要在升温段中升温1℃,根据该升温量确定该升温段的管径即可。此时,控制长段入口处的温度大于或等于49.2℃即可实现流体到达变形段时温度为50℃,实现该处变形段的弯曲,从该变形段流出的流体经降温段降温后温度为49℃,若需要下一关节变形,则控制该降温段后连接的升温段的管径,使得其升温量大于1℃,若不需要下一关节变形,则控制该降温段后连接的升温段的管径,使得其升温量小于1℃,进而可以控制下一关节是变形还是不变形。
本申请另一方面提供了一种基于摩擦效应的可控变形区的仿生关节的制备方法,所述方法包括:
S1,确定所述仿生结构的具体关节;
根据公式fs=mcΔt以及所述仿生结构的应用环境确定所述升温段1的直径、长度和摩擦系数,所述变形段2的直径和长度,其中,f为流体与管壁的摩擦力,可以根据压力、流体速度、公称直径等查表获得,S为所述升温段1的长度,m为流体的流量,Δt为流体在升温段1的温升;
根据公式s
由变形段2流入降温段3后与降温段3中流体混合降温,不至于流体随着流动的增加温度一直上升,同时可以降至下一关节所需的初始温度。
例如,当压力为4492pa,水流速为3m/s,公称直径为15mm时每米长升温段的每米长水管的摩擦阻力为12037pa/m。所以当1cm的水向前移动1cm时,即可升温0.16℃。此时若流体的初始温度为78.4℃,即认为水温升高1.6℃即可实现奥氏体转变。因此,此时升温段的长度为10cm时即可实现1.6℃的升温进而实现奥氏体相转变。由于升温段的公称直径为15mm,水流速为3m/s,因此,由流体的连续性方程s
S2,采用增材制造技术制备所述仿生关节。
采用选择性激光熔化成型技术打印所述仿生关节,获得所述仿生关节的坯体;对所述坯体进行时效处理,其中,选择性激光熔化成型技术的打印参数优选为:扫描速度500mm/s,激光功率90W,打印层厚30μm,扫描间距80μm。
本实施例中,降温段的管径为10mm或5mm,升温段和变形段的管径为1mm,选择NiTi作为制备材料,采用选择性激光熔化成型(Selective laser melting,简称SLM)技术打印所述仿生关节,向制备的仿生关节通入初始温度稍低于其相转变温度区间的水然后观察制件的变形情况,若各变形段满足变形需求,则该初始温度合适,若不满足各变形段的变形需求,则调整初始温度,或再次对关节进行优化,改变对应的升温段和降温段的长度组合直至满足所有变形段的变形要求。
上述选择性激光熔化成型(Selective laser melting,简称SLM)技术打印的仿生关节坯体还可以进行时效处理,以调节坯体内的微观组织,时效处理后的仿生关节各向异性差异小,组织性能更好。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 基于摩擦效应的变形可控的仿生关节及其制备方法和应用
- 基于摩擦效应的变形可控的仿生关节及其制备方法和应用