一种搭载无人机的变电站巡检机器人及巡检方法
文献发布时间:2023-06-19 10:13:22
技术领域
本发明涉及变电站巡检技术领域,特别涉及一种搭载无人机的变电站巡检机器人及巡检方法。
背景技术
变电站为电力设备中的一种,具体是指电力系统中对电压和电流进行变换,接受电能及分配电能的场所。为保证变电站的安全使用,需要定期对变电站进行巡检,人工巡检是变电站巡检的传统作业方式,巡检人员有时由于工作劳累和厌烦等因素,很容易造成漏检、错检,根据中国电科院的统计显示,每年由于漏检和错检造成的直接经济损失都要超过26亿元,可见人工巡检难以保证电力系统的安全可靠。
随着科技的发展,使用巡检机器人完成巡检任务,可以提高变电站运行的可靠性,成为一种发展趋势。但是使用巡检机器人完成巡检任务存在以下问题:一,巡检机器人行走至拍摄位置停止时,受惯性等因素影响,会产生倾角,至使拍摄目标超出摄像组件的拍摄范围。二,巡检机器人的摄像组件与巡检机器人之间存在最大向上扬角,若巡检机器人行至与变电站的设备距离较近,摄像组件受最大向上仰角限制,存在向上转动至最大仰角仍无法拍摄到目标的问题;此外,若巡检机器人行至与变电站的设备距离较远,摄像组件只要转动微小角度,拍摄目标即会偏离拍摄范围。
发明内容
为解决上述问题,本发明提供一种搭载无人机的变电站巡检机器人及巡检方法。
本发明采用的技术方案为:
一种搭载无人机的变电站巡检机器人,该搭载无人机的变电站巡检机器人包括机器人移动平台、无人机、机器人本体控制器、无线路由器和后台监控系统;所述机器人移动平台与机器人本体控制器连接,机器人本体控制器通过无线路由器与后台监控系统进行信息传输,并控制机器人移动平台按照后台监控系统控制指令在变电站内预设的巡检线路上行走及停车,机器人移动平台上设有无人机;所述无人机与机器人本体控制器无线信息传输,且受机器人本体控制器控制起飞和降落,且通过无人机上的摄像组件对变电站的设备及仪表进行拍摄。
优选的,所述机器人移动平台上还设有摄像云台,摄像云台与机器人本体控制器有线信息传输,且受机器人本体控制器控制,能够对变电站的设备、仪表及环境进行拍摄。
优选的,所述机器人本体控制器与无人机通过供电、数据传输电缆有线信息传输;所述供电、数据传输电缆缠绕于线缆绞盘上,其一端与无人机连接,另一端与机器人本体控制器连接;线缆绞盘设于机器人移动平台上,并通过机器人移动平台上的电动装置能够正向或反向转动,收放供电、数据传输电缆。
优选的,所述收放供电、数据传输电缆的长度为2.5米。
优选的,所述无人机的摄像组件由红外摄像头和可见光摄像头构成。
优选的,所述无人机上还设有无人机螺旋桨保护罩。
优选的,所述机器人本体控制器内设有激光定位装置,机器人移动平台依靠激光定位装置在变电站内规定的巡检线路上行走。
优选的,所述机器人移动平台上还设有与机器人本体控制器连接的激光测距器和超声波雷达。
一种利用上述的搭载无人机的变电站巡检机器人进行变电站巡检的方法,包括以下步骤,一行至拍摄位置,机器人本体控制器接收中控系统的控制指令,并按照控制指令控制机器人移动平台在变电站内规定的巡检线路上行走至变电站的设备仪表拍摄位置停止;二接受拍摄指令,机器人本体控制器通过无线路由器接收后台监控系统的控制指令,并控制无人机起飞,无人机通过其上的摄像组件对变电站的设备及仪表进行拍摄;三信息传输,无人机摄像组件将拍摄画面传输至机器人本体控制器,由机器人本体控制器再将摄画面传输至后台监控系统;四形成巡检结果,后台监控系统根据变电站的设备仪表拍摄画面进行分析处理,形成巡检结果。
本发明的有益效果是:
1.本发明不受巡检机器人行走倾角影响,同时距离变电站的设备较近或较远,均可清楚的对变电站的设备及仪表进行拍摄。
2.本发明的机器人本体控制器与无人机有线信息传输,且供电、数据传输电缆缠绕于线缆绞盘上,能够保证无人机与机器人本体控制器之间信息传输的有效性及可靠性的同时,供电、数据传输电缆也可有效对无人机的飞行最大距离进行限制,保证安全可靠的完成变电站巡检工作。
3.本发明的无人机上还设有无人机螺旋桨保护罩,进一步避免无人与对变电站内的设备产生碰撞,导致无人损坏。
4.本发明的机器人移动平台上还设有与机器人本体控制器连接的激光测距器和超声波雷达,使得机器人移动平台在变电站内规定的巡检线路上行走时能够有效躲避障碍物。
附图说明
图1为本发明自动导引小车行驶时的示意图;
图2为本发明无人机拍摄时的示意图;
图3为本发明无人机的结构示意图;
图4为本发明激光测距器的安装位置示意图;
图5为本发明机器人本体控制器的工作原理图。
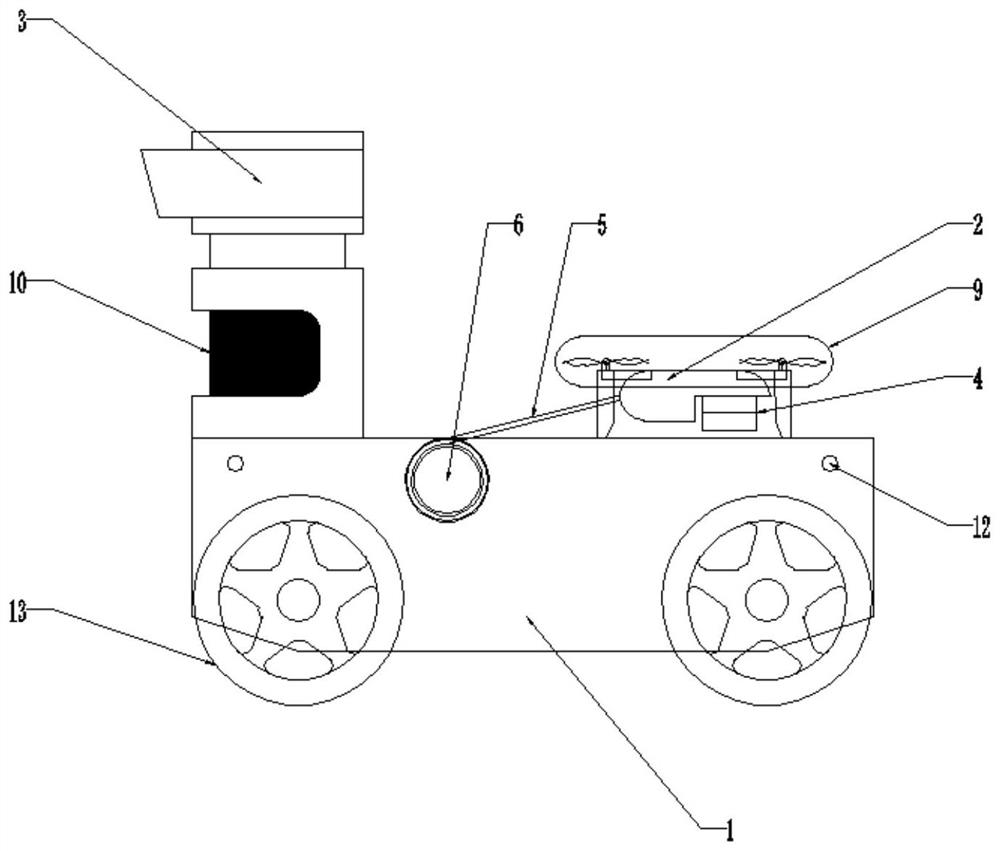
图1—4中,1—机器人移动平台、2—无人机、3—摄像云台、4—摄像组件、5—供电、数据传输电缆、6—线缆绞盘、7—红外摄像头、8—可见光摄像、9—无人机螺旋桨保护罩、10—机器人本体控制器、11—激光测距器、12—超声波雷达、13—驱动轮。
具体实施方式
下面将结合本发明实施例的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
如图1-5所示,本发明是一种搭载无人机的变电站巡检机器人,该搭载无人机的变电站巡检机器人包括机器人移动平台1、无人机2、机器人本体控制器10、无线路由器和后台监控系统。所述机器人移动平台1与机器人本体控制器10连接,机器人本体控制器10通过无线路由器与后台监控系统进行信息传输,无线路由器设于机器人本体控制器10内部,机器人本体控制器10按照后台监控系统控制指令,控制机器人移动平台1在变电站内预设的巡检线路上行走及停车,机器人移动平台1依靠后侧驱动轮13行走及停车,控制机器人移动平台1上设有无人机2。所述无人机2与机器人本体控制器10无线信息传输,且受机器人本体控制器10控制起飞和降落,且通过无人机10上的摄像组件4对变电站的设备及仪表进行拍摄。
需要说明的是所述机器人移动平台1的导引方式有多种。可在行驶路径上埋设金属导线,并加载低频、低压电流,使导线周围产生磁场,机器人移动平台1通过内部感应线圈对导航磁场强弱的识别和跟踪,实现电磁导引;也可在行驶路径的路面上贴设磁条替代金属导线,通过磁条感应信号实现磁带导引;还可在行驶路径的路面上贴设二维码,机器人移动平台1通过视觉识别二维码,实现二维码导引。本发明通过在机器人本体控制器10内设有激光定位装置,并在行驶路径的周围安装位置精确的激光反射板,由激光定位装置发射激光束,同时采集由反射板反射的激光束,来确定当前的位置和方向,并通过连续的三角几何运算来实现激光导引,在变电站内规定的巡检线路上行走。采用激光导引方式要比其他几种方式的灵活度和精准性高。
为了使得机器人移动平台1在变电站内规定的巡检线路上行走时能够有效躲避障碍物。所述机器人移动平台1上还可增设与机器人本体控制器10连接的激光测距器11和超声波雷达12,激光测距器11设于机器人移动平台1的前后端面上,超声波雷达12设于机器人移动平台1的两侧端面上。机器人移动平台1行走时,激光测距器11和超声波雷达12可随时感知机器人移动平台1周围的障碍物,并配合机器人本体控制器10内的激光定位装置对障碍物进行躲避,且重新规划路线行驶至巡检线路上。
所述机器人本体控制器10和无人机2信息传输连接,机器人本体控制器10接收后台监控系统的控制指令,并控制无人机2起飞和降落。所述无人机2通过其上的摄像组件4对变电站的设备仪表进行拍摄,并将拍摄画面通过机器人本体控制器10传输给中控系统。所述无人机2的摄像组件4优选为:由红外摄像头7和可见光摄像8头构成。同时配备红外摄像头7和可见光摄像8头,可使得无人机2不受灯光及阳光影响,白天和夜晚均可进行拍摄。
利用该搭载无人机的变电站巡检机器人进行变电站巡检时,首先行至拍摄位置,机器人本体控制器10接收后台监控系统的控制指令,并按照控制指令控制机器人移动平台1在变电站内规定的巡检线路上行走至变电站的设备仪表拍摄位置停止。然后接受拍摄指令,机器人本体控制器10接收中控系统的控制指令,控制无人机2起飞,无人机2通过其上的摄像组件4对变电站的设备仪表进行拍摄。然后进行信息传输,无人机2的摄像组件4将拍摄画面传输至机器人本体控制器10,由机器人本体控制器10再将摄画面传输至后台监控系统;最后形成巡检结果,后台监控系统根据变电站的设备仪表拍摄画面进行分析处理,形成巡检结果。
为了进一步减少无人机10的航行次数,也可在机器人移动平台1上增设摄像云台3配合无人机10对变电站的设备及仪表进行拍摄。摄像云台3与机器人本体控制器10有线信息传输,且受机器人本体控制器10控制。通过增设摄像云台3可实时观测变电站的环境,若机器人移动平台1行走至变电站的设备仪表拍摄位置时,拍摄目标满足摄像云台3的拍摄条件,机器人本体控制器10则无需向无人机2传输控制指令。由机器人本体控制器10直接向摄像云台3传输控制指令进行拍摄,并将拍摄画面传输至机器人本体控制器10,由机器人本体控制器10再将摄画面传输至后台监控系统。此外,增设摄像云台3也可使得后台监控系统通过机器人本体控制器10控制机器人移动平台1的行走方式增加为手动方式,使得该搭载无人机的变电站巡检机器人更为灵活。
为了保证机器人本体控制器10与无人机2之间信息传输的有效性及可靠性。本发明的机器人本体控制器10与无人机2通过供电、数据传输电缆5有线信息传输。所述供电、数据传输电缆5缠绕于线缆绞盘6上,其一端与无人机2连接,另一端与机器人本体控制器10连接;线缆绞盘6设于机器人移动平台1上,并通过机器人移动平台1上的电动装置能够正向或反向转动,收放供电、数据传输电缆5。供电、数据传输电缆5缠绕于线缆绞盘6上,能够保证无人机2与机器人本体控制器10之间信息传输的有效性及可靠性的同时,供电、数据传输电缆5也可有效对无人机2的飞行最大距离进行限制,保证安全可靠的完成变电站巡检工作。收放供电、数据传输电缆5的长度优选为2.5米。此外,为了避免无人与对变电站内的设备产生碰撞,导致无人损坏。所述无人机2上还设有无人机螺旋桨保护罩9。
- 一种搭载无人机的变电站巡检机器人及巡检方法
- 一种搭载无人机的变电站巡检机器人