三位调节弹性定位行走装置
文献发布时间:2023-06-19 10:13:22
技术领域
本发明属于焊接设备技术领域,尤其涉及一种三位调节弹性定位行走装置。
背景技术
目前,桩管/管道自动焊主要采用熔化极气体保护焊或自保护药芯焊丝焊多层多道焊工艺,其焊接设备主要采用轨道接头双弧板过渡柔性圆弧焊接轨道+行走焊接机头的类管道自动焊设备模式;其工作方式为焊前焊工在焊口上方/一侧装卡平行于焊口的柔性轨道,再将行走焊接机头装卡于轨道上,机头沿轨道行走,焊工调节机头上安装的焊枪,跟踪焊口焊接。
现有技术中,行走焊接机头底部的4个或5个行走/驱动轮需调整好角度和位置,以用于与有偏差的圆弧形柔性轨道装卡,现场安装难达到规定安装要求,易出现强力装卡现象,导致焊接过程中出现机头行走摇摆、卡死、打滑等问题,影响焊接质量和效率的不足;另外,还存在机头重量重,安装不够简便的不足。
为克服现设备的不足,申请人开发了一种由行走底块和焊接控制模块联接构成的分体式桩管/管道自动焊机头,该机头焊接控制模块,需要一种水平角度和前后位置固定可调,上下位置弹性可调和固定的行走轮调节装置,以适应不同直径桩管/管道的自动焊需求,可实现机头的快速移动,能稳定可靠驱动桩管自动焊机头行走,且还需要其结构简单紧凑,可靠耐用,调节定位简便,能满足机头轻量化设计要求。而现桩管或管道自动焊设备的行走轮调节模块一般只能满足两个自由度可调及弹性定位要求,不能满足使用要求。
发明内容
针对上述现有技术存在的问题,本发明提供一种三位调节弹性定位行走装置。
本发明的技术方案为:
一种三位调节弹性定位行走装置,所述行走装置包括:
支腿,所述支腿设置有沿竖向贯通的第一连接孔;
升降筒,所述升降筒可锁紧地活动穿设在所述第一连接孔中;
升降轴,所述升降轴的顶端活动穿过所述升降筒,所述升降轴的底端滑动设置在所述升降筒内;
连接轴,所述连接轴同轴固定设置在所述升降轴的底部,所述连接轴的直径小于所述升降轴的直径,所述连接轴位于所述升降筒内;
调节螺母,所述调节螺母螺纹连接在所述连接轴和所述升降筒之间,所述调节螺母和所述升降轴之间设置有弹性元件,所述弹性元件套装在所述调节螺母上;
轮卡,所述轮卡固定设置在所述升降轴的顶端上,所述轮卡设置有第二连接孔,所述第二连接孔的中心轴和所述第一连接孔的中心轴相互垂直;
行走轮轴,所述行走轮轴可锁紧地活动穿设所述第二连接孔。
进一步地,所述支腿的侧部设置有沿竖向贯通的第一安装槽,所述第一安装槽和所述第一连接孔连通设置;
所述支腿沿水平向设置有多个贯通第一锁紧孔,多个所述第一锁紧孔均和所述第一安装槽连通设置;
所述行走装置还包括至少一个第一锁紧螺钉,至少一个所述第一锁紧螺钉可对应穿过所述第一锁紧孔。
更进一步地,所述支腿的另一侧的侧部设置有沿竖向贯通的第二安装槽,所述第二安装槽和所述第一连接孔连通设置;
所述支腿沿水平向设置有多个贯通第二锁紧孔,多个所述第二锁紧孔均和所述第一安装槽连通设置;
所述行走装置还包括至少一个第二锁紧螺钉,至少一个所述第二锁紧螺钉可对应穿过所述第二锁紧孔,且,所述第二锁紧螺钉顶靠在所述升降筒的外周面上。
进一步地,所述升降筒的顶部上设置有向所述升降筒的径向延伸的限位凸台,所述限位凸台设置在所述支腿的顶部外侧。
更进一步地,所述升降筒的周面上设置有第一键槽,所述第一键槽的长度方向为所述升降筒的轴向;
所述升降轴的周面上设置有第二键槽,所述第二键槽的长度方向为所述升降轴的轴向,所述第二键槽内固定设置有键,所述键可操作地在所述第一键槽内沿所述升降轴的轴向移动。
进一步地,所述升降轴的顶部设置有同轴的连接凸台,所述连接凸台位于所述升降筒的顶部上方;
所述轮卡的顶部通过多个连接螺钉连接在所述升降轴的顶部上。
进一步地,所述连接凸台的顶部设置有同轴的定位凸台;
所述轮卡的底部设置有定位孔,所述定位凸台间隙配合地插设在所述定位孔中。
进一步地,所述升降筒的底部内侧设置有螺纹孔,所述调节螺母螺纹连接在所述螺纹孔内;
所述调节螺母的底端设置有连接翻板,所述连接翻板位于所述升降筒的底部下方;
所述行走装置还包括手柄,所述手柄连接在所述连接翻板的底部上。
进一步地,所述调节螺母的顶部设置有向其内部延伸的支撑翻板,所述支撑翻板呈环状设置,所述弹性元件设置在所述支撑翻板和所述升降轴之间,所述调节螺母活动设置在所述支撑翻板;
所述升降轴的底部设置有螺纹盲孔;
所述行走装置还包括卡板,所述卡板的顶部同轴设置有连接杆,所述连接杆螺纹连接在所述螺纹盲孔内,所述卡板的外沿凸出所述调节螺母设置,所述卡板的外沿位于所述支撑翻板的下方。
进一步地,所述轮卡的侧部设置有沿水平贯通的第三安装槽,所述第三安装槽和所述第二连接孔连通;
所述轮卡的侧部沿竖向设置有多个贯通的第二锁紧孔,多个所述第二锁紧孔均和所述第二安装槽连通设置;
所述行走装置还包括至少一个第二锁紧螺钉,至少一个所述第二锁紧螺钉可对应穿过所述第二锁紧孔。
本发明的有益效果至少包括:
本发明所公开的一种三位调节弹性定位行走装置,由于该行走装置的支腿设置有沿竖向贯通的第一连接孔,升降筒可锁紧地活动穿设在第一连接孔中,操作升降筒在第一连接孔中的所处角度,可调整升降筒所在的水平角度,由于升降轴的顶端活动穿过升降筒,因此,升降轴所在的水平角度也得以调整。
由于升降轴的顶端活动穿过升降筒,升降轴的底端滑动设置在升降筒内,连接轴同轴固定设置在升降轴的底部,连接轴的直径小于升降轴的直径,连接轴位于升降筒内,调节螺母螺纹连接在连接轴和升降筒之间,调节螺母和升降轴之间设置有弹性元件,弹性元件套装在调节螺母上,因此,通过转动调节螺母,调节螺母的转动可通过弹性件驱动升降轴升降,进而可调整升降轴的高度。
由于轮卡固定设置在升降轴的顶端上,在升降轴所在的水平角度和高度得以调整的情况下,轮卡所在的水平角度和高度也得以调整。
由于轮卡设置有第二连接孔,第二连接孔的中心轴和第一连接孔的中心轴相互垂直,行走轮轴,行走轮轴可锁紧地活动穿设第二连接孔,因此,操作行走轮轴在第二连接孔的位置并锁紧,可调整行走轮轴的前后位置,进而可调整行走轮轴的水平角度、高度以及前后位置。
还有,由于调节螺母和升降轴之间设置有弹性元件,因此,对行走轮轴的定位是弹性定位,行走轮轴的行走轮和轨道是一种柔性接触,当行走轮在轨道上运行时,可适应轨道上的颠簸等状况,保持良好的运行性能。
综上所述,本发明所提供的三位调节弹性定位行走装置实现了行走轮水平角度、前后和上下位置三个自由度调节,及弹性定位的功能,满足了需适应不同直径桩管焊接的分体式桩管自动焊机头对行走轮的调节定位功能要求;本发明结构简单紧凑,可靠耐用,调节定位简便,定位精度高,有益于机头轻量化设计,可提高桩管自动焊机头的定位精度和行走的可靠性。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
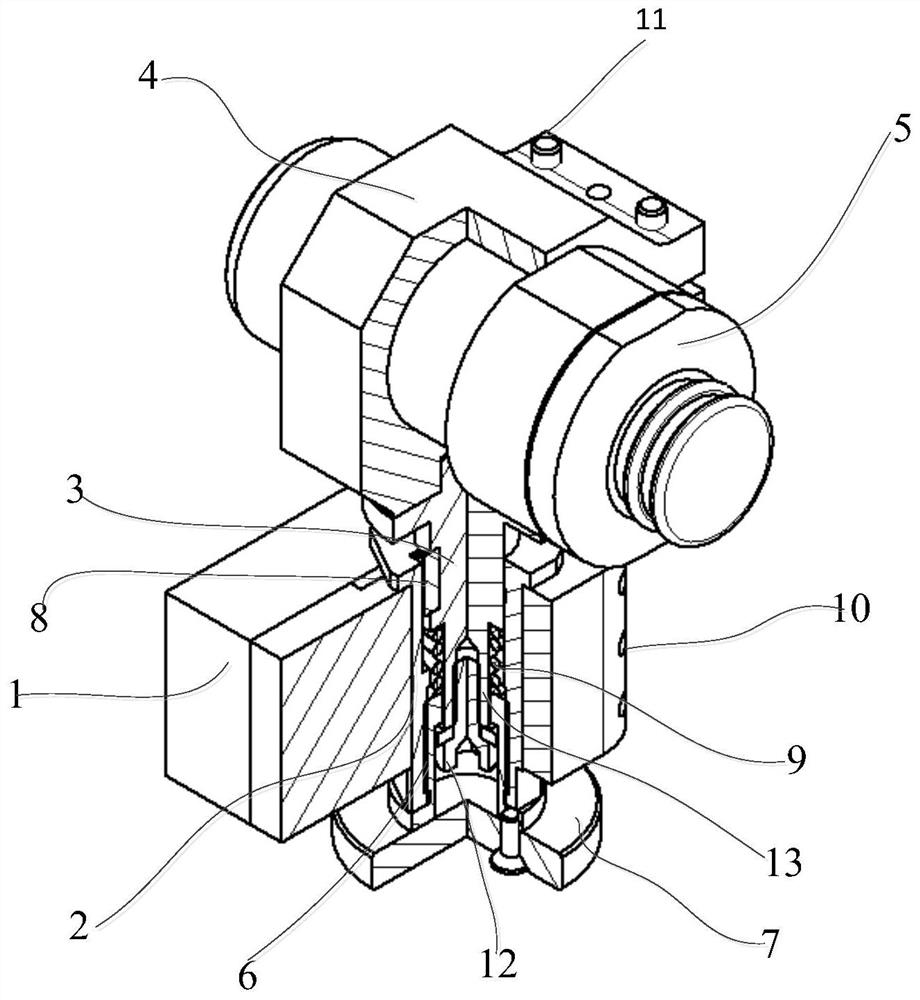
图1为本实施例的一种三位调节弹性定位行走装置的结构示意图;
图2为图1中的支腿的结构示意图;
图3为图1中的升降轴和升降筒的装配示意图;
图4为图1的升降筒的结构示意图;
图5为图4的剖视示意图;
图6为图1中的升降轴的结构示意图;
图7为图1的调节螺母的结构示意图;
图8为图1中的轮卡的结构示意图;
图9为图1中的行走轮轴的结构示意图;
图10为本实施例的具体应用示意图。
附图中:
支腿1,第一连接孔101,第一安装槽102,第一锁紧孔103,第二安装槽104,第二锁紧孔105,升降筒2,第一键槽201,限位凸台202,升降轴3,第二键槽301,连接凸台302,轮卡4,第二连接孔401,定位孔402,第三安装槽403,第二锁紧孔404,行走轮轴5,调节螺母6,连接翻板601,支撑翻板602,手柄7,键8,弹性元件9,第一锁紧螺钉10,第二锁紧螺钉11,连接轴13,连接杆14,螺纹盲孔1301,行走底块1000,柔性圆环轨道1001,行走底板200,基准行走轮轴300,上行走轮轴400。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1为本实施例的一种三位调节弹性定位行走装置的结构示意图,结合图1,该行走装置包括支腿1、升降筒2、升降轴3、调节螺母6、弹性元件9、轮卡4以及行走轮轴5。
结合图1,本实施例的支腿1设置有沿竖向贯通的第一连接孔101,而升降筒2可锁紧地活动穿设在第一连接孔101中,操作升降筒2在第一连接孔101中的所处角度,可调整升降筒2所在的水平角度。
图2为图1中的支腿的结构示意图,结合图2,本实施例的支腿1的侧部设置有沿竖向贯通的第一安装槽102,第一安装槽102和第一连接孔101连通设置,支腿1沿水平向设置有多个贯通第一锁紧孔103,多个第一锁紧孔103均和第一安装槽102连通设置,而该行走装置还包括至少一个第一锁紧螺钉10,至少一个第一锁紧螺钉10可对应穿过第一锁紧孔103,当升降筒2所处的水平角度调整到位后,将第一锁紧螺钉10在对应的第一锁紧孔103锁紧,即可将升降筒2固定锁紧在支腿1的第一连接孔101中。
进一步地,结合图1以及图2,本实施例的支腿1的另一侧的侧部设置有沿竖向贯通的第二安装槽104,第二安装槽104和第一连接孔101连通设置,支腿1沿水平向设置有多个贯通第二锁紧孔105,多个第二锁紧孔105均和第一安装槽102连通设置,而该行走装置还包括至少一个第二锁紧螺钉,至少一个第二锁紧螺钉可对应穿过第二锁紧孔105,且,第二锁紧螺钉顶靠在升降筒2的外周面上,以进一步将升降筒2固定锁紧在支腿1的第一连接孔101中。
本实施例中,第一锁紧孔103以及第二锁紧孔105可成排间隔设置,本实施例对此不作限制。
图3为图1中的升降轴和升降筒的装配示意图,结合图1以及图3,本实施例的升降轴3的顶端活动穿过升降筒2,升降轴3的底端滑动设置在升降筒2内,因此,在升降筒2的水平角度得以调整的情况下,升降轴3所在的水平角度也可以得以调整。
图4为图1的升降筒的结构示意图,图5为图4的剖视示意图,结合图3-图5,本实施例的升降筒2整体为圆筒形,升降筒2的顶部上设置有向升降筒2的径向延伸的限位凸台202,限位凸台202设置在支腿1的顶部外侧,这样可防止在松开用于将升降筒2固定在支腿1中的第一锁紧螺钉10以及第二锁紧螺钉时,升降筒2以及安装在升降筒2内的构件坠落。
本实施例的限位凸台202和升降筒2最好采用一体成型结构,以具有足够的承载强度。
图6为图1中的升降轴的结构示意图,结合图1、图3、图4、图5以及图6,本实施例在升降筒2的周面上设置有第一键槽201,第一键槽201的长度方向为升降筒2的轴向,而升降轴3的周面上设置有第二键槽301,第二键槽301的长度方向为升降轴3的轴向,第二键槽301内固定设置有键8,键8可操作地在第一键槽201内沿升降轴3的轴向移动,键8可以对升降轴3在升降筒2内的滑动方向进行导向,并可限制升降轴3的升降幅度,还可防止升降轴3在升降筒2内转动,使升降轴3只能在升降筒2内沿升降轴3的轴向移动。
本实施例中,第一键槽201和第二键槽301均可以为腰形孔,键8可以采用焊接或者一体成型的方式装配在升降轴3的周面上。
本实施例的键8可以设置有多个,多个键8可以绕升降轴3的中心轴等角度间隔设置。
结合图1以及图6,本实施例的连接轴13同轴固定设置在升降轴3的底部,连接轴13的直径小于升降轴3的直径,连接轴13位于升降筒2内,调节螺母6螺纹连接在连接轴13和升降筒2之间,调节螺母6和升降轴3之间设置有弹性元件9,弹性元件9套装在调节螺母6上,因此,通过转动调节螺母6,调节螺母6的转动可通过弹性件9驱动升降轴3升降,进而可调整升降轴3的高度。
图7为图1的调节螺母的结构示意图,结合图1、图3以及图7,本实施例中,升降筒2的底部内侧设置有螺纹孔,调节螺母6螺纹连接在螺纹孔内,而调节螺母6的底端设置有连接翻板601,连接翻板601位于升降筒2的底部下方,以限制调节螺母6的转动幅度,进而限制升降轴3的升降高度,而手柄7连接在连接翻板601的底部上,这样可通过操作手柄7带动调节螺母6的转动,方便操作。
本实施例中,连接翻板601可以和调节螺母6一体成型,而手柄7可通过多个呈环状的螺钉安装在连接翻板601的底部上,本实施例对此不作限制。
结合图1、图3以及图7,本实施例中,调节螺母6的顶部设置有向其内部延伸的支撑翻板602,支撑翻板602呈环状设置,弹性元件9设置在支撑翻板602和升降轴3之间,以实现弹性元件9的装配。
本实施例中,支撑翻板602可以和调节螺母6一体成型,而弹性元件9可以为弹簧,其套装在连接轴13上的设置,可以被弹性元件9的伸缩提供导向。
结合图3以及图6,本实施例中,连接轴13的底部设置有螺纹盲孔1301,该行走装置还包括卡板12,卡板12的顶部同轴设置有连接杆14,连接杆14螺纹连接在螺纹盲孔1301内,卡板12的外沿凸出调节螺母设置,卡板12的外沿位于支撑翻板602的下方,卡板12的安装可以限制调节螺母6的转动幅度,进而限制升降轴3的升降高度。
结合图1,本实施例中,轮卡4固定设置在升降轴3的顶端上,因此,在升降轴3的水平角度以及高度均得以调整的情况下,轮卡4的高度也得以调整。
图8为图1中的轮卡的结构示意图,结合图8,本实施例中,轮卡4设置有第二连接孔401,第二连接孔401的中心轴和第一连接孔101的中心轴相互垂直,即第二连接孔401沿水平向设置,行走轮轴5的输出端用于安装行走轮,行走轮轴5可锁紧地活动穿设第二连接孔401,因此,操作行走轮轴5在第二连接孔401的位置并锁紧,可调整行走轮轴5的前后位置,进而达到调整行走轮轴5的水平角度、高度以及前后位置的目的。
进一步地,本实施例中,结合图6,本实施例的升降轴3的顶部设置有同轴的连接凸台302,连接凸台302位于升降筒2的顶部上方,轮卡4的顶部通过多个连接螺钉连接在升降轴3的顶部上。
进一步地,结合图1、图3、图6以及图8,本实施例的连接凸台302的顶部设置有同轴的定位凸台303,轮卡4的底部设置有定位孔402,定位凸台303间隙配合地插设在定位孔401中,在将轮卡4装配在升降轴3的顶部时,可先将定位凸台303间隙配合地插设在定位孔401中,以使轮卡4在升降轴3进行初定位,再通过多个连接螺钉即可将轮卡4固定连接在升降轴3的顶部上,即轮卡4在升降轴3是可拆卸的设计,可保证装置耐用性的同时减轻其重量,因为升降轴3在使用中为与升降筒2动配合的零件,需使用更耐磨和耐用的低合金钢材料制作,而轮卡4是固定位置卡固行走轮轴静态应用,可采用铝合金等轻质材料和设计。
本实施例中,结合图8,轮卡4的侧部设置有沿水平贯通的第三安装槽403,第三安装槽403和第二连接孔401连通,轮卡4的侧部沿竖向设置有多个贯通的第二锁紧孔404,多个第二锁紧孔404均和第二安装槽402连通设置,至少一个第二锁紧螺钉11可对应穿过第二锁紧孔404。当行走轮轴5在轮卡4的第二连接孔401的位置调整到位后,将第二锁紧螺钉11在对应的第二锁紧孔403锁紧,即可使行走轮轴5在轮卡4的第二连接孔401中锁紧固定。
本实施例中,第二锁紧孔404可以成排等间距布置,本实施例对此不作限制。
图9为图1中的行走轮轴的结构示意图,结合图9,本实施例的行走轮轴5为阶梯圆柱状,前端为可自由转动的槽轮501,中段为限位凸台502,尾段为定位螺柱503,定位螺柱503可锁紧地设置在第二连接孔401,限位凸台502的直径尺寸大于槽轮501以及定位螺柱503的直径尺寸,以用于限制定位螺柱503的移动幅度。
综上所述,本实施例所提供的三位调节弹性定位行走装置实现了行走轮水平角度、前后和上下位置三个自由度调节,及弹性定位的功能,满足了需适应不同直径桩管焊接的分体式桩管自动焊机头对行走轮的调节定位功能要求;本发明结构简单紧凑,可靠耐用,调节定位简便,定位精度高,有益于机头轻量化设计,可提高桩管自动焊机头的定位精度和行走的可靠性。
具体应用:
图10为本实施例的具体应用示意图,结合图10,一个分体式桩管自动焊机头的行走底块1000的行走系统,由安装于其行走底板200上部中间和左上部的1个基准行走轮轴300和1个上行走轮轴400,以及安装于其行走底板200下部左右两端的2个本实施例的三位调节弹性定位行走装置100构成。
结合图10,2个本实施例的三位调节弹性定位行走装置100的支腿1与行走底块1000的行走底板200一体设计和加工,设置于行走底板200下部左右两端,拆下2套实施例的三位调节弹性定位行走装置100的手柄7,持2套无支腿1和手柄7的本实施例的三位调节弹性定位行走装置100,将其升降筒2分别插装于行走底板200的2个支腿1的第一连接孔101中,升降筒2的限位凸台202压于支腿1的顶部,上紧支腿1的第一锁紧螺钉10,将升降筒2抱紧固定在支腿1的第一连接孔101中,以螺钉将2个手柄7重新固定于升降螺母6的连接翻板601上,即完成2个实施例的三位调节弹性定位行走装置100的安装。
当进行分体式桩管自动焊机头行走底块1000与桩管双弧板轨道接头过渡的柔性圆环轨道1001安装前,需先分别对2个本实施例的三位调节弹性定位行走装置100预调整,以便于安装时的行走底块1000的装卡和行走轮轴的槽轮位置角度调整。单个本实施例的三位调节弹性定位行走装置100的调整过称为:①下调行走轮轴5位置,顺时针旋转手柄7,带动螺纹连接于升降筒2中的升降螺母6顺时针旋转下移,通过弹性件9下拉升降轴3,从而拉动升降轴3及其上联接安装的轮卡4、行走轮轴5等一同沿升降筒2的第一键槽201下移,至行走轮轴5前端的槽轮外圆与行走底块1000的基准行走轮组件300前端的槽轮外圆的垂直间距大于柔性圆环轨道1001宽度3mm;②微松第二锁紧螺钉11,使安装于轮卡4的第二连孔中的行走轮轴5能旋转前后移动;③微松第一锁紧螺钉10,使支腿1的第一连孔的开口微张,使固定于于支腿1的第一连接孔中的升降筒2处于能以手转动而不自由转动和移动状态。
当进行分体式桩管自动焊机头行走底块1000与桩管双弧板轨道接头过渡的柔性圆环轨道1001安装时,需在行走底块1000的1个基准行走轮轴300和1个上行走轮轴400的槽轮已按要求,挂装于水平卡固于桩管段上的柔性圆环轨道1001后,以基准行走轮轴300的安装为基准,调整2个本实施例的行走轮轴5的槽轮角度和位置,使其精准的卡装于柔性圆环轨道1001上,其调整方式和上述类型,本实施例对此不作赘述。
当用采用本实施例的分体式桩管自动焊机头进行焊接时,本实施例的行走轮轴5的槽轮在水平角度、前后位置上固定不变,只是上下位置随柔性圆环轨道1001宽度偏差变化上下自动弹性调节,即弹性元件9和升降轴3及固定于其上端的行走轮轴5等自动上下变化或弹性移动,保证焊接过程中行走底块1000可自适应±1.5mm的轨道宽度偏差,从而保证分体式桩管自动焊机头可沿自动焊轨道平稳可靠的行走。
当要将行走底块1000从柔性圆环轨道1001上拆下时,只需旋转行走底块1000下部两端的2个本实施例的手柄7,使其2个行走轮轴5位置下移,即可将行走底块1000取下。
经应用表明,具有行走轮水平角度、前后和上下位置3自由度调节,及上下位置弹性定位的功能的本发明三位调节弹性定位行走轮,结构简单紧凑,可靠耐用,调节定位简便,定位精度高,可降低机头重量15%左右,可提高桩管自动焊机头的定位精度和行走的可靠性。实现了发明目的。
以上所举实施例为本发明的较佳实施方式,仅用来方便说明本发明,并非对本发明作任何形式下的限制,任何所述技术领域中具有通常知识者,若在不脱离本发明所提技术特征的范围内,利用本发明所揭示技术内容所作出局部更动或修饰的等效实施例,并且未脱离本发明的技术特征内容,均仍属于本发明技术特征的范围内。
- 三位调节弹性定位行走装置
- 三位调节弹性定位行走装置