基于卷积神经网络的车库出车安全提示系统
文献发布时间:2023-06-19 10:14:56
技术领域
本发明涉及智能车库技术领域,具体涉及一种基于卷积神经网络的车库出车安全提示系统。
背景技术
地下车库的出口处往往是急转加陡坡,车速不好控制。
部分车库的出口方向与相邻道路方向垂直并且紧密相连。行人或者车辆在路过车库出口时可能不会注意到从车库中即将驶出的车辆,对于在车库前经过的行人和车辆存在一定的安全隐患。
当驾驶员驾车从车库中驶出时,对驾驶员来说,车库出口位置的左右两侧存在视觉盲区。现有技术中,在驾驶员驾车从车库中驶出时,智能车库管理系统不能及时地对车库出口附近的行人和车辆进行车库出车安全提示。
发明内容
针对现有技术中存在的上述缺陷,本发明通过影像获取单元实时获取预设数量的连续的图像,通过图像处理单元首先对影像获取单元采集的连续的图像进行变形处理,然后,对图像进行特征提取并与卷积神经网络训练得到的各种车辆模型特征进行匹配,以此判断图像中是否存在车辆,若图像中存在车辆,对图像中的车辆进行标记。然后,计算图像中被标记的车辆的行驶方向、相对于车库出口的距离、移动速度和到达车库出口的预测时间。然后,判断车辆到达车库出口的预测时间是否大于预设的安全时间;若车辆到达车库出口的预测时间大于预设的安全时间,微处理器通过驱动单元控制提示单元执行车库出车安全提示操作。微处理器通过驱动单元调整提示灯的亮度、闪烁频率、颜色、开关状态或者语音播报中的一种或者多种方式对车库出口位置的行人进行安全提示和引导。以此,在车库中有车辆向外驶出时,及时对车库出口两侧的行人以及车辆进行安全提示。
本发明是通过采用以下技术方案实现的, 按此目的设计的基于卷积神经网络的车库出车安全提示系统包括:影像获取单元,图像处理单元,车库出车安全提示触发单元,微处理器,驱动单元,提示单元和存储单元。
所述图像处理单元包括:图像变形处理单元、车辆检测单元、方向检测单元、距离检测单元、速度检测单元和时间预测单元。
所述提示单元包括:光照提示单元和语音提示单元。
所述光照提示单元包括:第一提示灯、第二提示灯、第三提示灯、第四提示灯、第五提示灯、导光板和投影仪。
所述语音提示单元包括:语音生成单元、音箱和语料库。
影像获取单元作为输入单元与微处理器相连;微处理器与图像处理单元、车库出车安全提示触发单元和存储单元相连;微处理器的输出端与驱动单元的输入端相连;驱动单元的输出端与光照提示单元和语音提示单元相连。
采用卷积神经网络,通过对大量的车辆图片进行学习训练,获得各种类型车辆的模型。
训练时分别采用50000张不同类型的车辆图片对各种车辆模型进行训练。
影像获取单元:在车库出口顶端的位置固定安装一个摄像装置,实时获取预设数量的连续的图像。
所述摄像装置为非红外摄装置和红外摄装置的一种或者多种组合。
图像处理单元包括:图像变形处理单元、车辆检测单元、方向检测单元、距离检测单元、速度检测单元和时间预测单元。
图像变形处理单元:对影像获取单元实时获取的预设数量的连续的图像进行变形处理。
车辆检测单元:对图像变形处理单元处理后的连续的图像进行处理并判断图像中是否存在车辆;通过对图像进行特征提取并与卷积神经网络训练得到的各种车辆模型特征进行匹配,若图像中的特征与卷积神经网络训练得到的车辆模型特征相匹配,则判断为图像中存在车辆并对图像中的车辆进行标记。
方向检测单元:对车辆检测单元处理后的连续的图像进行计算确定车辆相对于车库出口的行驶方向,进而确定车辆是否即将从车库中驶出。
若车辆相对于车库出口的移动速度为正时,表示车辆即将从车库中驶出。
若车辆相对于车库出口的移动速度为负时,表示车辆即将驶入车库。
若车辆相对于车库出口的移动速度为0时,表示车辆停止不动。
距离检测单元:对车辆检测单元处理后的连续的图像进行计算以此确定车辆相对于车库出口的距离。
速度检测单元:对车辆检测单元处理后的连续的图像进行计算以此确定车辆相对于车库出口的移动速度大小。在任意的两帧图像中,被车辆检测单元标记的车辆相对于车库出口距离的差值除以采集两帧图像的时间得到车辆相对于车库出口的移动速度大小。
时间预测单元:对距离检测单元计算得到的车辆相对于车库出口的距离和速度检测单元计算得到的车辆速度值进行处理,由车辆相对于车库出口的距离除以当前车辆的速度值,以此得到当前车辆到达车库出口的预测时间。
车库出车安全提示触发单元:判断时间预测单元计算得到的预测时间是否大于预设的安全时间;若时间预测单元计算得到的预测时间大于预设的安全时间,微处理器通过驱动单元控制提示单元执行车库出车安全提示操作。
车库出车安全提示操作:微处理器通过驱动单元调整提示灯的亮度、闪烁频率、颜色、开关状态或者语音播报中的一种或者多种方式对车库出口位置的行人进行安全提示和引导。
所述微处理器用于数据处理。
所述驱动单元用于对提示单元进行驱动。
所述存储单元用于访问和存储卷积神经网络训练得到的各种车辆模型。
提示单元包括:光照提示单元和语音提示单元。所述提示单元通过调整提示灯的亮度、闪烁频率、颜色、开关状态或者语音播报中的一种或者多种方式对车库出口位置的行人进行安全提示和引导。
所述光照提示单元通过调整提示灯的亮度、闪烁频率、颜色、开关状态对车库出口位置的行人进行灯光提示和引导。
光照提示单元包括:第一提示灯、第二提示灯、第三提示灯、第四提示灯、第五提示、导光板和投影仪。每个提示灯分别固定在一个导光板中;所述提示灯为多色LED灯;所述导光板的形状为长方形,导光板的底面印有图案;所述导光板将指示灯的光线及颜色均匀反射出来。所述第一提示灯固定在车库出口左侧的墙壁上面,第二提示灯固定在车库出口右侧的墙壁上面;第三提示灯和第五提示灯固定在车库出口正前方的两侧,第四提示灯固定在车库出口正前方的中间位置。
所述投影仪通过投影动态影像信息进行安全提示和引导,投影仪安装在车库出口的顶端,投影仪将动态影像信息投影到车库出口正前方的路面。
所述语音提示单元通过语音播报对车库出口位置的行人进行语音提示和引导。
语音提示单元包括:语音生成单元、音箱和语料库。
所述音箱固定在第一提示灯和第二提示灯的正上方。
本发明的程序流程如下。
步骤S11:采用卷积神经网络,通过对大量的车辆图片进行学习训练,获得各种类型车辆的模型。
步骤S12:通过影像获取单元实时获取预设数量的连续的图像。
步骤S13:通过图像变形处理单元对影像获取单元实时获取的预设数量的连续的图像进行变形处理。
步骤S14:通过车辆检测单元对图像变形处理单元处理后的连续的图像进行处理并判断图像中是否存在车辆;通过对图像进行特征提取并与卷积神经网络训练得到的各种车辆模型特征进行匹配,若图像中的特征与卷积神经网络训练得到的车辆模型特征相匹配,则判断为图像中存在车辆,然后,执行步骤S15;否则,返回执行步骤S12。
步骤S15:对图像中的车辆进行标记。
步骤S16:判断车辆是否即将从车库中驶出,通过方向检测单元对车辆检测单元处理后的连续的图像进行计算确定车辆相对于车库出口的行驶方向,进而确定车辆是否即将从车库中驶出。
若车辆相对于车库出口的移动速度为正时,表示车辆即将从车库中驶出,执行步骤S17;否则,返回执行步骤S12。
步骤S17:通过距离检测单元对车辆检测单元处理后的连续的图像进行计算以此确定车辆相对于车库出口的距离。
步骤S18:通过速度检测单元对车辆检测单元处理后的连续的图像进行计算以此确定车辆相对于车库出口的移动速度大小。在任意的两帧图像中,被车辆检测单元标记的车辆相对于车库出口距离的差值除以采集两帧图像的时间得到车辆相对于车库出口的移动速度大小。
步骤S19:通过时间预测单元对距离检测单元计算得到的车辆相对于车库出口的距离和速度检测单元计算得到的车辆速度值进行处理,由车辆相对于车库出口的距离除以当前车辆的速度值,以此得到当前车辆到达车库出口的预测时间。
步骤S20:通过车库出车安全提示触发单元判断时间预测单元计算得到的预测时间是否大于预设的安全时间;若时间预测单元计算得到的预测时间大于预设的安全时间,执行步骤S21;否则,返回执行步骤S12。
步骤S21:微处理器通过驱动单元控制提示单元执行车库出车安全提示操作,微处理器通过驱动单元调整提示灯的亮度、闪烁频率、颜色、开关状态或者语音播报中的一种或者多种方式对车库出口位置的行人进行安全提示和引导。
附图说明
图1为本发明的系统框图。
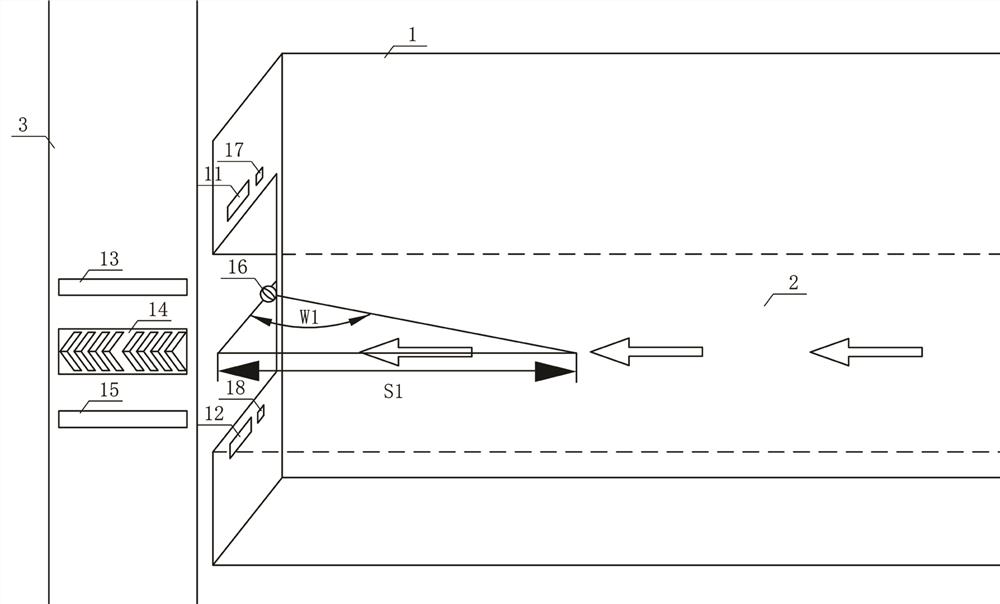
图2为本发明的车库出口场景应用示意图。
图3为本发明的车库出口单向通道俯视图。
图4为本发明的车库出口双向通道俯视图。
图5为本发明的程序流程图。
图2中1为车库,2为车库出口通道,3为车库出口相邻街道,11为第一提示灯,12为第二提示灯,13为第三提示灯,14为第四提示灯,15为第五提示灯,16为摄像装置,17和18为音箱,S1为车辆相对于车库出口的距离,W1为摄像头的拍摄角度范围。
具体实施方式
下面结合附图和具体实施例对本发明做进一步的阐述。
第一实施例。
如图1-图5。
本发明通过影像获取单元实时获取预设数量的连续的图像,通过图像处理单元首先对图像进行变形处理,使图像满足预处理要求。然后,通过卷积神经网络对图像进行特征提取并与卷积神经网络训练得到的各种车辆模型进行匹配判断图像中是否存在车辆,若图像中存在车辆,首先,对图像中的车辆进行标记,然后计算被标记车辆的行驶方向、相对于车库出口的距离、移动速度和到达车库出口的预测时间。若车辆从车库内部朝车库出口移动,同时车辆到达车库出口的预测时间大于预设的安全时间,提示单元执行车库出车安全提示操作,微处理器通过驱动单元调整提示灯的亮度、闪烁频率、颜色、开关状态或者语音播报中的一种或者多种方式对车库出口位置的行人进行提示。以此,在有车辆从车库中驶出时,及时对车库出口两侧的行人以及车辆进行安全提示。
其中,车辆到达车库出口的预测时间= 车辆相对于车库出口的距离/当前车辆的速度值。车辆到达车库出口的预测时间随当前车速的变化而变化。
其中,在任意的两帧图像中,车辆相对于车库出口的移动速度大小 = 被车辆检测单元标记的同一车辆相对于车库出口距离的差值/采集两帧图像的时间。
采用卷积神经网络,通过对大量的车辆图片进行学习训练,获得各种类型车辆的模型。
训练时分别采用50000张不同类型的车辆图片对各种车辆模型进行训练,以此通过大量的训练集对各种车辆模型进行训练,增加车辆识别的准确率。
影像获取单元:在车库出口顶端的位置固定安装一个16摄像装置,实时获取预设数量的连续的图像,W1为摄像头的拍摄角度范围。
第二实施例。
如图1、图2和图5。
本发明的程序流程如下。
步骤S11:采用卷积神经网络,通过对大量的车辆图片进行学习训练,获得各种类型车辆的模型。
步骤S12:通过影像获取单元实时获取预设数量的连续的图像。
步骤S13:通过图像变形处理单元对影像获取单元实时获取的预设数量的连续的图像进行变形处理。
步骤S14:通过车辆检测单元对图像变形处理单元处理后的连续的图像进行处理并判断图像中是否存在车辆;通过对图像进行特征提取并与卷积神经网络训练得到的各种车辆模型特征进行匹配,若图像中的特征与卷积神经网络训练得到的车辆模型特征相匹配,则判断为图像中存在车辆,然后,执行步骤S15;否则,返回执行步骤S12。
步骤S15:对图像中的车辆进行标记。
步骤S16:判断车辆是否即将从车库中驶出,通过方向检测单元对车辆检测单元处理后的连续的图像进行计算确定车辆相对于车库出口的行驶方向,进而确定车辆是否即将从车库中驶出。
若车辆相对于车库出口的移动速度为正时,表示车辆即将从车库中驶出,执行步骤S17;否则,返回执行步骤S12。
步骤S17:通过距离检测单元对车辆检测单元处理后的连续的图像进行计算以此确定车辆相对于车库出口的距离。
步骤S18:通过速度检测单元对车辆检测单元处理后的连续的图像进行计算以此确定车辆相对于车库出口的移动速度大小。在任意的两帧图像中,被车辆检测单元标记的车辆相对于车库出口距离的差值除以采集两帧图像的时间得到车辆相对于车库出口的移动速度大小。
步骤S19:通过时间预测单元对距离检测单元计算得到的车辆相对于车库出口的距离和速度检测单元计算得到的车辆速度值进行处理,由车辆相对于车库出口的距离除以当前车辆的速度值,以此得到当前车辆到达车库出口的预测时间。
步骤S20:通过车库出车安全提示触发单元判断时间预测单元计算得到的预测时间是否大于预设的安全时间;若时间预测单元计算得到的预测时间大于预设的安全时间,执行步骤S21;否则,返回执行步骤S12。
步骤S21:微处理器通过驱动单元控制提示单元执行车库出车安全提示操作,微处理器通过驱动单元调整提示灯的亮度、闪烁频率、颜色、开关状态或者语音播报中的一种或者多种方式对车库出口位置的行人进行安全提示和引导。
第三实施例。
如图1-图5。
在车库出口顶端位置的16摄像装置实时获取连续的图像,当有多辆车从车库的内部同时向车库出口方向移动时,这里假设有A、B和C三辆车同时从车库内部向车库出口方向移动。图像处理单元首先对图像进行变形处理,使图像满足预处理要求。然后,16摄像装置采集的图像被送入卷积神经网络,卷积神经网络对图像进行特征提取后访问存储单元,然后与卷积神经网络训练得到的各种车辆模型进行匹配判断图像中是否存在车辆,如果图像中存在车辆,车辆检测单元对图像中的车辆进行标记,这里被标记的车辆为多个,车A、车B和车C同时被标记。然后分别计算被标记的车A、车B和车C的行驶方向,只有从车库内部向车库出口方向移动的车辆才会进行下一步处理。若系统检测到车A,车B和车C从车库内部向车库出口方向移动时,距离检测单元和速度检测单元分别计算车A,车B和车C相对于车库出口的距离和移动速度,进而根据车A,车B和车C当前的移动速度分别计算车A,车B和车C到达车库出口的预测时间。当车A、车B和车C中任意一辆车到达车库出口的预测时间大于预设的安全时间,车库出车安全提示触发单元被触发,微处理器通过驱动单元控制提示单元执行车库出车安全提示操作。
微处理器通过驱动单元驱动光照提示单元和语音提示单元对车库出口位置的行人进行灯光和语音提示。位于车库出口位置的11第一提示灯、12第二提示灯、13第三提示灯、14第四提示灯和15第五提示灯被点亮并且快速闪烁发出红光,投影仪投影动态出车影像,同时,语音提示单元中的音箱进行语音播报。以此,在有车辆从车库中驶出时,及时对车库出口两侧的行人以及车辆进行安全提示。
第四实施例。
微处理器通过无线通信单元访问局域网、互联网或者手机、平板等终端,及时对存储单元中存储的各种车辆模型进行数据更新。
以上所述仅为本发明的较佳实施例,并非用来限定本发明的实施范围 ;凡是依本发明所作的等效变化与修改,都被本发明权利要求书的范围所覆盖。
- 基于卷积神经网络的车库出车安全提示系统
- 车库出车安全提示系统