一种术前三维影像与术中透视图像的无标定物配准方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及一种术前三维影像与术中透视图像的无标定物配准方法,特别是医疗机器人辅助进行手术导航过程的医学图像配准方法。
背景技术
目前,在常见医疗机器人辅助手术导航定位过程中,如在股骨颈骨折手术中,传统方法是在股骨或骨盆上植入标定物,以建立机器人坐标系与手术空间坐标系之间的映射关系,并在此基础上进行手术路径规划和定位。该方法能够大大增加股骨骨折复位的精确度,但同样会给患者增加创伤及感染的风险。
一种方法是利用2D/3D图像配准算法的图像导航的放射手术方法和系统,其利用了分层和迭代的2D/3D配准算法求出内层面和外层面的变换参数。此配准算法的缺点是准确度较低,速度较慢。另一种方法是使用DRR技术对MRI和X-Ray图像配准的算法和系统,其特点在于先对MRI图像做提取分割,由分割后的图像生成DRR用于配准,缺点是算法需要事先训练,从而获取特征用于分割,受限于训练的集合大小及范围,而且成本较大。
形状描述子已经广泛应用于现在的形状匹配算法中,轮廓段的角度信息和弧长弦长的关系表示其边界信息,采样点和质心点之间的距离关系表示其区域信息,所以能够对轮廓段的形状有完全定量的描述,更全面地描述轮廓的形状,显著提高描述能力。
本发明将形状描述子方法应用于术前三维影像与术中透视图像的无标定物配准过程中,可提高配准精度和速度。
发明内容
本发明提供了一种术前三维影像与术中透视图像的无标定物配准方法,可应用于外科手术导航系统,使其操作简单,速度快,准确度高。
为实现上述目的,本发明中术前三维影像与术中透视图像的无标定物配准方法包括以下步骤:
1)首先利用人体模型,设计出一个模拟现实的解剖学和频率相关的系统噪声(包括量子噪声)模型M:
2)在手术开始前,由CT或MRI获取一系列三维图像,根据手术需求,在冠状位、矢状位或横断位的视角方向上,从0°开始每间隔预设度数根据CT或MRI提供的三维图像生成N张DRR图像,获取对应的位姿参数P;其中,P=(θx,θy,θz,X,Y,Z),θx、θy、θz表示旋转方向, X、Y、Z表示坐标系下各个方向下的平移量;
3)在手术过程中,C型臂上的X射线机获取不同角度的X-Ray透视图像;
4)对DRR图像i应用模型M,添加解剖学噪声和频率相关噪声,透视图像上的每一个像素均做二维高斯加权归一化处理,每一个像素原始灰度值减去高斯加权均值,然后除以高斯加权均方差从而获取归一化后的像素灰度值;
5)采用线性直方图匹配算法,校正DRR图像i与X-Ray透射图像的灰度差异,选择灰度值大于投影图像灰度均值的区域进行直方图匹配,消除背景像素对直方图的影响;
6)对DRR图像i与X-Ray用OpenCV3.4.0中的canny算子进行边缘检测,再用findContours() 分别进行轮廓提取,透射图像进行轮廓和直方图相似度比较,如果两组图像匹配,获取X-Ray 透射图像位姿参数,并进入下一步;否则提取DRR图像i+1信息,并返回步骤4);
7)进行轮廓相关性和点配准为术前三维影像和X-Ray透视图像精确配准,输出精确配准后的图像,完成术前三维影像与术中透视图像的无标定物配准;
所述步骤2)中,从0°开始每间隔预设度数1°或2°根据CT/MRI提供的三维图像生成N个 DRR图像;
所述步骤3)中,C型臂上的X射线机获取X-Ray透视图像至少获取两张。
所述步骤1)和步骤6)中,所述轮廓匹配相关作为相似度测量的配准算法,轮廓匹配相似度评价方法如下:
1)形状描述子:对于一段给定的轮廓段S,对其进行像素点采样,如图3所示,首先采样得到采样点P
函数D
式中:di是采样点Pi质心点G的归一化距离,由Pi和fPi之间的距离来归一化;αi是表示由
式中,SD(S)是3×N维矩阵;
其中,每列代表该轮廓段上第i个采样点的形状描述子D
每行代表轮廓段的距离信息,角度信息和弧度信息;
得到完整轮廓段的形状描述子之后可以进行模板匹配;
通过形状描述子间的相似度来表示两条轮廓段的匹配关系;
形状描述子以矩阵表示,二者的矩阵相关系数可以反映其关系得密切程度,就能代表不同轮廓段的匹配程度,不同形状描述子之间的相关系数被称为轮廓的匹配系数;
2)评价标准:轮廓匹配过程中,首先要提取DRR图像和X-Ray图像的感兴趣区域轮廓,然后根据50%-IoU和20%-IoU标准得出匹配结果。
优选的,必须在DRR图像和X-Ray图像中取一个健康的骨骼边缘轮廓。
进一步的,为生成的每张DRR图像添加医学解剖学和频率等噪声,来模拟真实的X-Ray 光片。
进一步的,对模拟出来的X-Ray图像进行图像预处理,包括亮度、对比度提高,这样可以提高DRR图像股骨边缘轮廓更真实。
进一步的,选取感兴趣区域需要有一定医学背景的医生或培训人员进行操作;轮廓边缘点的选取一定要具有代表性;点的匹配如果得出的旋转或者平移矩阵太大,我们认为匹配并不成功。
附图说明
图1是本发明从不同视野角度对术前CT或MRI图像进行数字投影重建示意图;
图2是笔形束在CT数据集的第一个后前(PA)切片中进入体素;
图3是轮廓段形状描述子示意;
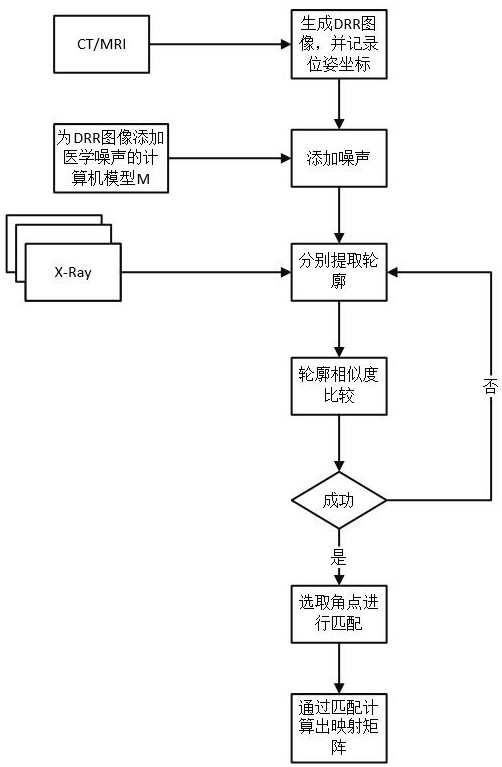
图4是为本发明流程示意图;
图5是分别从X-Ray和DRR图片提取的股骨二值图像轮廓。
具体实施示例
下面结合附图和实施例对本发明进行详细的描述,但本发明的的实施方式不限于此。
图1~图5所示,本发明提供一种术前三维影像与术中透视图像的无标定物配准方法,以股骨为例,其具体包括以下步骤:
1)通过实验得出X-Ray图像股骨部分的一般性信噪比。
2)在手术开始前,由CT或MRI获取一系列三维图像,根据手术需求,在冠状位、矢状位或横断位的视角方向上;从0°开始每间隔预设度数根据CT或MRI提供的三维图像生成N个DRR图像,如图1,获取对应的位姿参数P;其中,预设度数优选为1°或2°。
3)为每张图像添加噪声,以便于提取股骨边缘轮廓;
添加噪声函数:DRRp+s=DRRp+scatter;
式中DRRPp+s是添加了线性散布(实验性测量)的主要DRR,scatter是光束散射参数;
位姿参数公式:P=(θx,θy,θz,X,Y,Z);
式中,θx、θy、θz表示旋转方向,X、Y、Z表示在坐标系各个方向下的平移量。
4)手术中,C型臂上的X射线机获取不同角度的X-Ray透视图像两张;两张透视图象加角尽量垂直,结果会更理想。
5)采用线性直方图匹配算法,校正DRR图像i与X-Ray透射图像的灰度差异,选择灰度值大于投影图像灰度均值的区域进行直方图匹配,消除背景像素对直方图的影响。
6)对DRR图像i与X-Ray用OpenCV3.4.0中的canny算子进行边缘检测,再用findContours()分别进行轮廓提取,如图5(a)、(b),透射图像进行轮廓比较,如果两组图像轮廓匹配值大于给定的阈值,获取X-Ray透射图像位姿参数,记录,并进入下一步;否则提取 DRR图像i+1信息,并返回步骤5);
7)对轮廓匹配成功的两DRR图像和X-Ray图像,分别提取shift角点,如图5(c)、(d),并进行角点匹配,得出角点匹配矩阵。
尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
- 一种术前三维影像与术中透视图像的无标定物配准方法
- 一种术前三维影像与术中透视图像的无标定物配准方法