一种自行走设备的灯光控制方法和自行走设备
文献发布时间:2023-06-19 10:18:07
技术领域
本发明属于自行走设备技术领域,具体涉及一种自行走设备的灯光控制方法和自行走设备。
背景技术
自行走设备是一种能够在道路和户外连续的、实时的自主移动的智能机器人。智能割草机器人作为自行走设备的一种,适用于清理丘陵、梯田、平原等地块的植被,以及草坪之内的杂草。其操作简单,工作效率高。我们常见的学校,以及街道美化,都是用割草机来完成的,在国外,许多家庭用割草机来为自己的花园除草。
自行走设备在使用时,自行在工作区域内移动,当人或动物在工作区域内移动时,可能会接近自行走设备,为了避免自行走设备与人或动物发生碰撞,会在自行走设备上利用传感器进行障碍物检测并进行避障,一些设备还会设置警示装置,发出灯光或者声音提供预警。现有的灯光预警装置多是在设备上设置单一光源,通过光源闪烁等方式进行警示。由于在机身单点设置光源,在某些方向上,光源可能被设备外壳遮蔽,导致警示作用不显著。
随着科技发展,视觉传感器在自行走设备上的应用越来越多,通常为了保证视觉传感器采集图像清晰,视觉传感器中镜头周围会设置灯光补偿装置,导致视觉传感器整体体积较大,占用空间较多,不利于整机零部件布局,同时为了保证视觉传感器图像采集过程中不被遮挡,视觉传感器通常需要突出于机身设置,视觉传感器自身体积较大,凸出机身较多,不美观的同时,也会导致机身高度增加、视觉传感器容易被碰撞损坏等缺陷。
发明内容
为解决以上问题,本发明提出了一种自行走设备的灯光控制方法和自行走设备。
为实现以上目的的技术解决方案如下:
一种自行走设备的灯光控制方法,所述自行走设备上设置有环形灯光装置和检测元件,
根据所述检测元件的检测方位信息,所述环形灯光装置朝向所述检测方位的部分区域亮起。
进一步地,所述检测元件为超声波传感器或红外线传感器或视觉传感器或电容传感器。
进一步地,所述检测元件包括多个,多个检测元件沿周向均匀分布于设备的机身,所述检测方位信息包括检测元件检测到的障碍物的方位,当所述检测元件检测到障碍物时,所述环形灯光装置朝向所述障碍物方位的部分区域亮起。
进一步地,所述障碍物为动物。
进一步地,所述检测元件为电容传感器,通过电容传感器检测障碍物相对于设备的距离和方位,当所述距离低于所设阈值时,触发环形灯光装置警示,环形灯光装置上朝向障碍物的部分区域亮起,其余区域不发亮。
进一步地,所述检测元件为视觉传感器,所述视觉传感器包括摄像头,所述视觉传感器能够在设备机身上转动,所述检测方位信息包括所述摄像头的朝向方向,当视觉传感器工作时,所述环形灯光装置与所述摄像头的朝向方向对应的部分区域亮起以实现灯光补偿,其余区域不发亮,所述摄像头的朝向方向与所述视觉传感器的视觉采集方向相对应。
进一步地,所述视觉传感器上设置有角度传感器。
进一步地,所述自行走设备包括光照强度传感器,通过光照强度传感器检测环境光照强度,当所检测的光照强度低于预设阈值时,利用环形灯光装置进行灯光补偿。
进一步地,所述环形灯光装置设置于设备机身侧部,由多个独立的灯管组件依次连接而成,灯管组件绕自行走设备一周设置,每个灯管组件能够独立控制发亮。
进一步地,所述环形灯光装置设置于设备机身侧部,由绕自行走设备一周分布的多个发光元件组成,所述发光元件为能够独立控制发亮的LED灯珠或发光二极管。
一种自行走设备,所述自行走设备包括灯光控制单元,所述灯光控制单元包括环形灯光装置和检测元件,所述灯光控制单元用于实现上述的灯光控制方法。
进一步地,所述自行走设备为智能割草机。
与现有技术相比,本发明的有益效果是:
(1)在自行走设备一周设置环形灯光装置,发光区域更大,且不受机壳结构遮蔽,能更好的进行发光警示等功能,同时环形灯光装置可以沿自行走设备侧部设置,可以降低机身高度,传统灯光警示设备为了防止被遮蔽,将发光装置设置于机壳顶部,增高了机身整体高度,增大了机身体积,升高了重心位置,容易导致机身被上方障碍物碰撞,通过性差,行走不稳定等问题;
(2)自行走设备自身传感器对接近自行走设备的生物的方位进行判断,根据判断结果控制环形灯光装置上部分区域亮起,亮起区域与生物接近方向一致,可以准确地对生物接近方向所在区域进行灯光警示,避免传统灯光警示装置可能被机壳自身结构遮蔽,导致部分方向看不到灯光,起到更好的警示作用;
(3)环形灯光装置还可以用于对视觉传感器摄像头进行灯光补偿,通过判断视觉传感器摄像头朝向,控制环形灯光装置上部分区域亮起,亮起区域与摄像头朝向方向一致,在保证光照补偿的同时,减小视觉传感器自身体积,更利于整机布局,同时环形灯光装置中可以包括不同颜色、不同亮度的多级发光装置,分别用于进行灯光警示和灯光补偿等功能。
附图说明
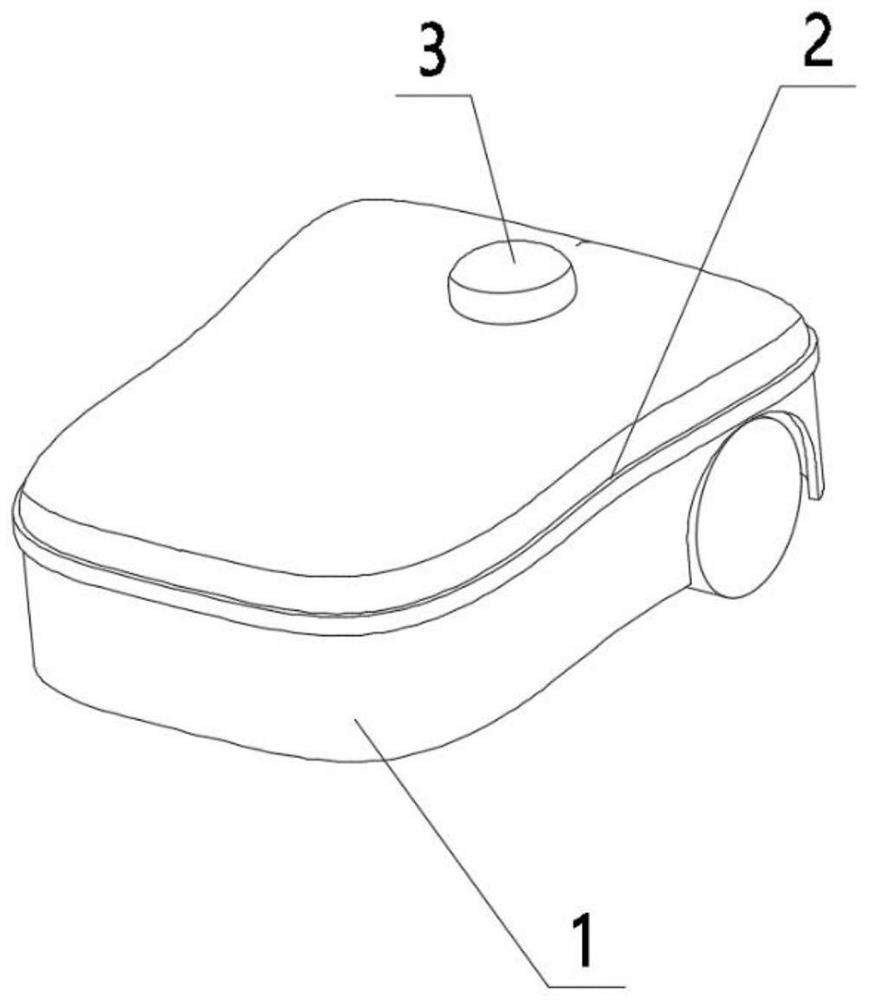
图1、具有环形灯光装置的设备结构示意图。
图2、环形灯光装置结构示意图一。
图3、环形灯光装置结构示意图二。
图4、检测元件设置示意图。
图中,1、割草机器人;2、环形灯光装置;3、检测元件;201、灯管组件;202、LED灯珠;301、电容传感器。
具体实施方式
下面结合附图对本发明作进一步的详细描述。
本实施例中,自动行走设备为智能割草机器人,但在其他实施例中,自动行走设备还可以是智能扫雪机、智能清洁设备等。
如图1所示的割草机器人1包括切割单元、行走单元、控制单元和通讯单元,切割单元包括切割刀盘和与切割刀盘相连的割草电机,用于执行割草指令,行走单元包括行走轮、与行走轮相连的行走电机、辅助轮,控制单元分别与切割单元、行走单元和通讯单元相连。
割草机器人1上设置有环形灯光装置2,所述环形灯光装置2为环绕割草机器人1一周设置的发光元件,具体可以是如图2和图3所示的两种布置方式。
如图2所示的环形灯光装置2由多个独立的灯管组件201依次连接而成,灯管组件201绕割草机器人1一周设置,每个灯管组件201可以独立控制发亮。
如图3所示的环形灯管装置由绕割草机器人1一周分布的发光元件组成,发光元件可以是LED灯珠202,发光二极管等独立发光元件,每个发光元件可以独立控制发亮。
割草机器人1上还设置有检测元件3,所述检测元件3可以是超声波传感器、红外线传感器、视觉传感器、电容传感器等。具体的,所述检测元件3可以检测到割草机器人1周围是否存在有障碍物或者动物等可能阻碍自身运动的物体,并判断出上述物体相对于割草机器人1的方位。
如图4所示是一种检测元件3的布置情况,本实现方式中,检测元件3为均匀分布在机身一周的电容传感器,该电容传感器为非接触式,利用电容式传感器在四边均镀上狭长的电极,在导电体内形成一个低电压交流电场。在人或动物在靠近时,由于人体电场,人体与导体层间会形成一个耦合电容,四边电极发出的电流会流向触点,而电流强弱与人体到电极的距离成反比,位于电容感应器后面的控制器便会计算电流的比例及强弱,从而感应到人体或物体离割草机器人1远近。割草机器人1一周设置有多个电容传感器,可以根据具体被触发的是哪一个电容传感器,来进一步判断靠近的人或者动物相对于割草机器人1的方位。
本发明的割草机器人的灯光控制方法可用于实现灯光警示和灯光补偿。
基于上述割草机器人1实现的一种灯光警示方法包括如下步骤:
1、设备运行过程中,通过检测元件3检测靠近障碍物相对于设备本身的距离和方位;
2、当检测距离低于所设阈值时,触发灯管警示,环形灯光装置2亮起;具体的,根据障碍物相对于设备本身的方位,环形灯光装置2上朝向障碍物的部分区域亮起,其余区域不发亮。
具体的,如果采用图2所示的环形灯光装置2,可以将对应位置的灯管组件201与电容传感器连接,其中一个电容传感器检测到靠近障碍物的距离小于预设阈值时,触发对应的灯管组件201亮起。
如果采用图3所示的环形灯光装置2,可以利用编码手段,将检测元件3所检测到的障碍物方位信息转化为对应指令,根据指令触发对应区域的LED灯珠202发光,起到定向警示的作用。
在另一种实现方式下,如图1所示,检测元件3为视觉传感器,包含有摄像头,视觉传感器可在割草机器人1机身上转动,视觉传感器上设置有角度传感器等检测设备,可以确定视觉传感器的摄像头朝向。
基于上述割草机器人1实现的一种灯光补偿方法包括如下步骤:
1、设备运行过程中,当视觉传感器工作时,采集视觉传感器位置信息,确定视觉传感器的摄像头朝向;
2、根据视觉传感器的摄像头朝向,环形灯光装置2上与摄像头朝向方向相同的部分区域亮起,其余区域不发亮。
割草机器人1上还可以设置光照强度传感器,在步骤2前,通过光照强度传感器检测环境光照强度,当所检测的光照强度低于预设阈值时,利用环形灯光装置2进行灯光补偿。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种自行走设备的灯光控制方法和自行走设备
- 一种自动行走设备的运行控制方法及自动行走设备