数据获取方法和系统
文献发布时间:2023-06-19 10:19:37
技术领域
本发明实施例涉及扫描技术,尤其涉及一种数据获取方法和系统。
背景技术
随着建筑技术的发展,在对非平面区域进行工程实施,例如在非平面地形(如山区)上进行工程实施时,前期都需要进行现场地形勘察,在知道实际地形后才能进行工程施工,尤其对于光伏电站的施工,由于光伏电站施工需要铺设光伏组件,对地形的精细要求高,必须获取米级以内的地形情况,才能确定该区域是否能安装光伏组件。
目前,对于地形的勘测主要有两种方式,其一是通过对拍摄的地形的图片进行识别,对识别后的图形进行整合获取完整的地形。其二是在待勘测的地形表面设置多个扫描点,通过测距感应无人机扫描地形表面的各扫描点,然后将获取的各扫描点的坐标进行拼接整合,得到整个地形,即每个扫描点单独扫描,然后将各扫描点进行拼接。
上述方式一,由于摄像头的坐标系与地形坐标系不一致,在摄像头坐标系和地形坐标转换的过程中,存在坐标转换误差。上述的方式二,通过局部测量,再数据整合,缺乏地形的全局性,数据整合结果可能不精确。
发明内容
本发明实施例提供一种数据获取方法和系统,以实现对非平面区域进行全貌高精度的扫描,避免以局部数据拼接整合得到全局数据而带来的误差的问题。
第一方面,本发明实施例提供了一种数据获取方法,该方法包括:
基于待扫描的目标地形,确定所述目标地形的目标采集点;
基于所述目标采集点,构建三维空间坐标系,并确定所述目标采集点的初始位置信息;
确定每个所述目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的所述目标地形中各扫描点的测量信息;
基于所述初始位置信息,以及所述目标地形中各扫描点的测量信息,确定所述目标地形中各扫描点的目标位置信息。
第二方面,本发明实施例还提供了一种数据获取系统,该系统包括:
数据处理设备和至少一个目标测距设备;
所述数据处理设备,用于基于待扫描的目标地形,确定所述目标地形的目标采集点,以及基于所述目标采集点,构建三维空间坐标系,并确定所述目标采集点的初始位置信息;
至少一个目标测距设备,与所述数据处理设备通信连接,设置在各目标采集点处,用于采集在至少两种预设采集高度下采集的所述目标地形中各扫描点的测量信息,并将所述测量信息发送至所述数据处理设备;
所述数据处理设备,用于接收的所述目标地形中各扫描点的测量信息,并基于所述初始位置信息,以及所述目标地形中各扫描点的测量信息,确定所述目标地形中各扫描点的目标位置信息。
本发明实施例的技术方案,通过基于待扫描的目标地形,确定目标地形的目标采集点,基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息,确定每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息,基于初始位置信息,以及目标地形中各扫描点的测量信息,确定目标地形中各扫描点的目标位置信息,这样实现了对非平面区域进行全貌高精度的扫描,避免以局部数据拼接整合得到全局数据而带来的误差的问题。
附图说明
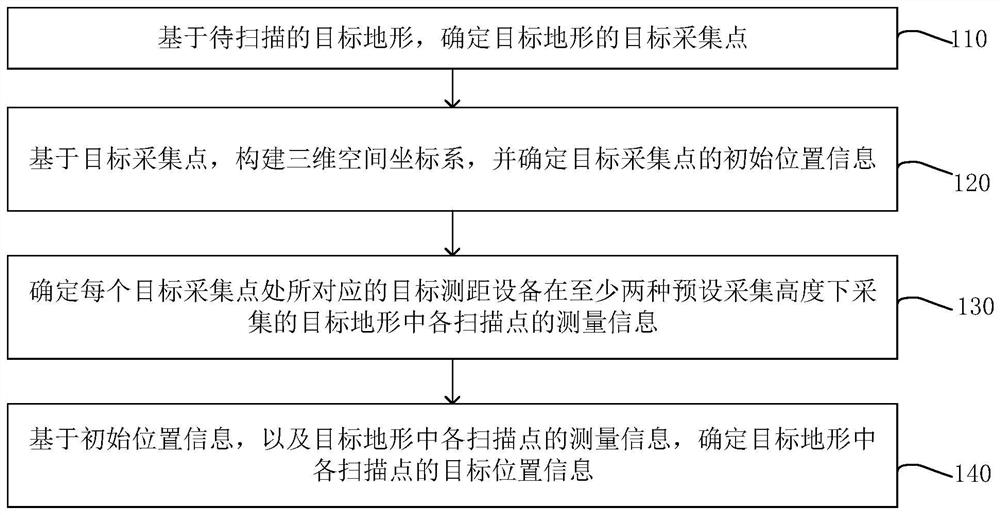
图1是本发明实施例一中的数据获取方法的流程图;
图2是本发明实施例二中的数据获取方法的流程图;
图3是本发明实施例二中的待扫描的目标地形相对于地平面的投影区域示意图;
图4是本发明实施例二中的目标地形相对于地平面的投影区域的面积最小的外接矩形示意图;
图5是本发明实施例二中的边缘采集点的确定方式示意图;
图6是本发明实施例三中的三维空间坐标系的构建示意图;
图7是本发明实施例三中的目标地形的数据获取方法的执行流程图;
图8是本发明实施例三中的任选的某一预设采集高度下测量信息的确定示意图;
图9是本发明实施例三中的上升不同水平面扫描目标地形表面的示意图;
图10是本发明实施例三中的目标地形的边界的各扫描点的测量信息的确定示意图;
图11是本发明实施例四中的数据获取装置的结构示意图;
图12是本发明实施例五中的数据获取系统的结构示意;
图13是本发明实施例六中的数据获取系统的结构示意;
图14是本发明实施例七中的数据获取系统的结构示意。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
实施例一
图1为本发明实施例一提供的数据获取方法的流程图,本实施例可适用于对非平面的地形进行扫描的情况,该方法可以由数据获取装置来执行,该数据获取装置可以由软件和/或硬件来实现,该数据获取装置可以配置在电子计算设备上,具体包括如下步骤:
S110、基于待扫描的目标地形,确定目标地形的目标采集点。
示例性的,待扫描的目标地形可以是待进行扫描的地形,例如,可以是一块非平面的地形,这里的非平面的地形可以是,不是规则形状(例如不是矩形、规则圆形等)的、凹凸不平的地形。
目标采集点可以是在利用采集设备(例如测距设备)对目标地形中的扫描点进行采集时,采集设备所处于的点。
根据待扫描的目标地形,可确定目标地形的目标采集点,具体的可根据目标地形在地面上的投影来确定目标采集点。具体的目标采集点的确定过程在后续实施例中再详细描述。
S120、基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息。
示例性的,初始位置信息可以是构建出目标地形的三维空间坐标系后,确定的目标采集点的初始的位置信息,例如,构建出三维空间坐标系后,确定的目标采集点相较于原点的坐标。
基于目标采集点,可对目标地形构建三维空间坐标系,并基于确定的三维空间坐标系,来确定目标采集点的初始位置信息。
S130、确定每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息。
示例性的,目标测距设备可以是用于进行测距的设备。例如可以是测距感应无人机等。
预设采集高度可以是预先设置的目标测距设备所在的高度。
目标地形中各扫描点可以是目标地形中的各点,即形成目标地形的各点。示例性的,可以是将目标地形看做由多个点组成的一个区域,这里的扫描点即为组成目标地形的各点。
测量信息可以是目标测距设备在至少两种预设采集高度下采集的目标地形中的各扫描点的位置信息。
根据目标采集点处设置的目标测距设备,可在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息。具体的可以是根据目标采集点处设置的目标测距设备中的感应器来相互感应,得到感应信息,根据感应信息可确定在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息。
需要说明的是,这里的目标测距设备的上、下、左、右、前和后六个方向可均具有测距感应器,这六个方向上的测距感应器可调整为相互垂直的关系,且这六个测距感应器具有可旋转功能,以此来实现角度调整,实现对目标地形的测距扫描,利用这六个方向的测距感应器可得到在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息。
S140、基于初始位置信息,以及目标地形中各扫描点的测量信息,确定目标地形中各扫描点的目标位置信息。
示例性的,目标位置信息可以是确定的目标地形中各扫描点的最终位置信息。
根据获取的各目标采集点的初始位置信息,以及目标地形中各扫描点的测量信息,基于各目标采集点的初始位置信息,对目标地形中各扫描点的测量信息进行计算,即可得到目标地形中各扫描点的目标位置信息。
由于目标测距设备在对目标地形中的各扫描点进行测量时,是在各目标采集点进行的,因此,需要根据各目标采集点的初始位置信息,以及目标地形中各扫描点的测量信息,来确定目标地形中的各扫描点在构建的三维空间坐标系中的目标位置信息。
采用这种方式,在获取目标地形中的各扫描点的位置信息时,是直接从目标地形的全局出发来获取到的目标地形中各扫描点的三维坐标信息,而不是现有技术中在目标地形处设置扫描点,获取各扫描点的位置信息,根据各扫描点的位置信息,将各扫描点进行拼接,得到目标地形的全局扫描点的位置信息。本发明实施例的技术方案实现了对非平面区域进行全貌高精度的扫描,避免以局部数据拼接整合得到全局数据而带来的误差的问题。
需要说明的是,本发明实施例的技术方案,可应用于光伏施工工程中,利用上述方法获取待施工工地的各扫描点的目标位置信息,根据各扫描点的目标位置信息构建该待施工工地的三维数据模型,光伏施工可以在该三维数据模型下进行光伏组件的精准布局,提高设计优化效率。
本发明实施例的技术方案,通过基于待扫描的目标地形,确定目标地形的目标采集点,基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息,确定每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息,基于初始位置信息,以及目标地形中各扫描点的测量信息,确定目标地形中各扫描点的目标位置信息,这样实现了对非平面区域进行全貌高精度的扫描,避免以局部数据拼接整合得到全局数据而带来的误差的问题。
实施例二
图2为本发明实施例二提供的数据获取方法的流程图,本发明实施例与上述实施例中各个可选方案可以结合。在本发明实施例中,可选的,所述基于待扫描的目标地形,确定目标地形的目标采集点,包括:获取待扫描的目标地形相对于地平面的投影区域,基于相对于地平面的投影区域规划出目标地形的目标采集点。
如图2所示,本发明实施例的方法具体包括如下步骤:
S210、获取待扫描的目标地形相对于地平面的投影区域,基于相对于地平面的投影区域规划出目标地形的目标采集点。
示例性的,待扫描的目标地形相对于地平面的投影区域可以是将待扫描的目标地形从俯视观察,将其投影到地平面上所形成的区域。
参考图3所述的待扫描的目标地形相对于地平面的投影区域示意图,将目标地形从俯视位观察,即可形成图3所示的形状。
在得到目标地形后,获取目标地形相对于地平面的投影区域,根据该相对于地平面的投影区域可规划出目标地形的目标采集点。
可选的,所述基于相对于地平面的投影区域规划出目标地形的目标采集点,包括:获取目标地形相对于地平面的投影区域的面积最小的外接矩形,基于面积最小的外接矩形的各顶点确定目标地形的边缘采集点。
示例性的,目标地形相对于地平面的投影区域的面积最小的外接矩形可以是目标地形相对于地平面的投影区域的外接矩形中的面积最小的外接矩形。参考图4所述的目标地形相对于地平面的投影区域的面积最小的外接矩形示意图,从图3中可以看到矩形1234为目标地形相对于地平面的投影区域的面积最小的外接矩形。
可选的,目标采集点包括边缘采集点。这里的边缘采集点可以是用于采集目标地形的边缘区域的扫描点(即可以是目标地形的投影区域的边界线上的各扫描点)的采集点。
根据确定的目标地形相对于地平面的投影区域的面积最小的外接矩形的各顶点,可确定目标地形的边缘采集点。
这样确定目标地形的边缘采集点,可根据边缘采集点来采集目标地形的边缘区域的扫描点的测量信息。
在本发明实施例中,可选的,边缘采集点可以包括初始边缘采集点和中间边缘采集点。
示例性的,初始边缘采集点可以是将确定的目标地形相对于地平面的投影区域的面积最小的外接矩形的各顶点作为初始边缘采集点。参考图5所述的边缘采集点的确定方式示意图,在图5中,矩形1234是目标地形相对于地平面的投影区域的面积最小的外接矩形,1、2、3和4是目标地形相对于地平面的投影区域的面积最小的外接矩形的顶点,即顶点1、2、3和4是初始边缘采集点。
中间边缘采集点可以是基于各初始边缘采集点确定的。
边缘采集点的确定具体的可以是将目标地形相对于地平面的投影区域的面积最小的外接矩形的四个顶点中,相邻两个顶点之间的距离划分为至少两段,优选的可以是划分为等份的至少两段,将除初始边缘采集点之外的端点确定为中间边缘采集点。
如图5所示,顶点1和顶点2之间的距离等分为n段,将顶点1和顶点4之间的距离等分为m段,每段中除初始边缘采集点之外的端点作为中间边缘采集点。如图5中的1
需要说明的是,顶点2和顶点3之间的划分,与顶点1和顶点4之间的划分一致,顶点3和顶点4之间的划分,与顶点1和顶点2之间的划分一致。这里不再进行阐述。
需要说明的是,在图5中的,是将相邻两个顶点之间的距离进行均分分割,即每段的距离是相同的。在另一种实施例中,还可以是将相邻两个顶点之间的距离不进行均分分割,即每段的距离不一定是相同的。具体的分割方式,可根据用户需求自行选取,这里不做限定。
在本发明实施例的技术方案中,以将相邻两个顶点之间的距离进行均分分割,即每段的距离是相同的为例进行说明。
S220、基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息。
S230、确定每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息。
S240、基于初始位置信息,以及目标地形中各扫描点的测量信息,确定目标地形中各扫描点的目标位置信息。
本发明实施例的技术方案,通过获取待扫描的目标地形相对于地平面的投影区域,基于相对于地平面的投影区域规划出目标地形的目标采集点,这样确定目标地形的目标采集点中的边缘采集点,可根据边缘采集点来采集目标地形的边缘区域的扫描点的测量信息。
实施例三
本发明实施例与上述实施例中各个可选方案可以结合。在本发明实施例中,更了更好的理解本发明实施例的技术方案,下面以具体的例子来进行说明上述实施例二中的步骤S220-S230的技术方案:
基于得到的目标地形的目标采集点,基于如下方式,确定目标采集点的初始位置信息:
可选的,所述基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息,包括:任选一个初始边缘采集点作为原点,构建三维空间坐标系;基于初始边缘采集点,将相邻两个初始边缘采集点之间的距离划分为至少两段,将除初始边缘采集点之外的端点确定为中间边缘采集点;基于至少两个目标测距设备的测距感应器的感应信息分别确定每个初始边缘采集点以及中间边缘采集点的初始位置信息。
示例性的,初始位置信息可以是在进行目标地形的扫描点的测量信息采集前,每个初始边缘采集点和中间边缘采集点的位置信息。
参考图6所述的三维空间坐标系的构建示意图,在图6中,矩形1234是目标地形相对于地平面的投影区域的面积最小的外接矩形,1、2、3和4是目标地形相对于地平面的投影区域的面积最小的外接矩形的顶点,即顶点1、2、3和4是初始边缘采集点。
在图6中的勘察区域即为目标地形区域。
根据上述确定的初始边缘点,任选其中一个初始边缘采集点作为原点,构建三维空间坐标系,如图6所示,将顶点1作为原点,构建三维空间坐标系,根据初始边缘采集点,根据上述中间边缘采集点的确定方式来确定中间边缘采集点。
在顶点1、2、3和4处各放置一个感应基标,将至少两个目标测距设备(例如可以是测距感应无人机)置于顶点1、2、3和4中的至少两个顶点处,根据至少两个目标测距设备的测距感应器的感应信息,即可得到每个初始边缘采集点以及中间边缘采集点的初始位置信息。
在本发明实施例中,以目标测距设备为测距感应无人机为例,如图6所示,分别在顶点1、2、3和4处的感应基标的垂直正上方设置一个测距感应无人机,分别为UAV-1、UAV-2、UAV-3和UAV-4。通过测距感应无人机自身的水平感应器使四台测距感应无人机保持水平,将测距感应无人机的上下左右前后六方向测距感应器调整为相互垂直关系。通过测距感应无人机相互感应使四台测距感应无人机(UAV-1、UAV-2、UAV-3和UAV-4)保持在同一水平面上,在后续的测量过程中该四台测距感应无人机(UAV-1、UAV-2、UAV-3和UAV-4)始终保持为同一水平。
在图6中的UAV-5为另一目标测距设备,该目标测距设备用于在后续突变区域进行使用,具体的作用和使用方式在后续进行说明。
图6中的UAV-6为一具有拍摄功能的设备,例如可以是一图像采集设备,该图像采集设备用于采集突变区域的图像,其具体作用和使用方式在后续进行说明。
参考图7所述的目标地形的数据获取方法的执行流程图,在设置好测距感应无人机后,基于设置好的测距感应无人的测距感应器的感应信息,分别确定每个初始边缘采集点以及中间边缘采集点的初始位置信息。
如图6所示,首次测量时以目标地形相对于地平面的投影区域的最小面积的外接矩形的四个顶点处的感应基标为该三维空间坐标系下的“零水平面”,四台测距感应无人机以“零水平面”保持同水平面上,测量记录其他边界点上测距感应无人机对感应基标的水平面距离。基于各初始边缘采集点处设置的目标测距设备的测距感应器的感应信息,获取目标采集点中的初始边缘采集点的初始位置信息,其中,每个初始边缘采集点处均设置有一个目标测距设备(如图6)。
通过图6中测距感应无人机相互感应测量距离,得到点2对点1的距离、点4对点1的距离,综合水平面距离得到“零水平面”下四点的三维坐标1(0,0,0)、2(x
需要说明的是,这里的顶点2、3和4的Z轴坐标不为零、顶点2的Y轴坐标与顶点1不同、顶点2与顶点3的X轴坐标不同、顶点4与顶点1的X轴坐标不同的原因是:目标地形并不是水平面的,可能存在凹凸不平的情况,这里的顶点2、3和4的坐标是以目标地形是凹凸不平的情况为例进行说明的。
这里得到的顶点1、2、3和4的坐标即为初始边缘采集点的初始位置信息。基于同样的方式,在各中间边缘采集点处也设置测距感应无人机,即可也获取中间边缘采集点的初始位置信息。
在本发明实施例中,中间边缘采集点的初始位置信息的获取方式具体可以是:如图5所示,将相邻两初始边缘采集点进行等份分段,即每段的距离相同,即可得到每个中间边缘采集点的初始位置信息。
具体的方式是:将一个初始边缘采集点处的测距感应无人机依次向相邻两个初始边缘采集点处移动,每次移动一个分段距离,基于各测距感应无人机的测距感应器的感应信息,获取中间边缘采集点的初始位置信息。
例如,如图5所示,将图5中点1到点4之间的Y14距离等分m+1份(m越大扫描越精细),并且将感应基标点1上的测距感应无人机UAV-1沿着Y14直线向点4移动,每次移动的距离为
具体的,中间边缘采集点的初始位置信息的获取方式可根据用户需求自行选取,这里不做限定。在本发明实施例中,优选以将相邻两初始边缘采集点进行等份分段的方式,这样可节省测距感应无人机的使用数量,节省成本。
这样可根据目标测距设备的测距感应器的感应信息来得到更为精确的各初始边缘采集点和各中间边缘采集点的初始位置信息,这样相较于人为的去测量,减少了误差。
当得到各初始边缘采集点和各中间边缘采集点的初始位置信息后,根据如下步骤,即可得到每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息:
可选的,所述确定每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的目标地形中各扫描点的测量信息,包括:将初始边缘采集点处所对应的目标测距设备逐步垂直上升预设调整高度,分别得到在每个预设采集高度下采集的目标地形中各扫描点的测量信息。
示例性的,预设调整高度可以是预先设置的目标测距设备每次的调整高度。这里的预设调整高度可以是相同的,也可以是不同的,具体的可根据用户需求自行选取,这里不做限定。
具体的,比如目标测距设备处于某一高度上,当在该高度上,得到在目标地形中的各扫描点的测量信息后,将目标测距设备垂直上升预设调整高度,到达另一高度上,再得到在高度下的目标地形中的各扫描点的测量信息。
预设采集高度可以是预先设置的目标测距设备进行目标地形的各扫描点的扫描时所处于的高度。
将初始边缘采集点处所对应的目标测距设备逐步垂直上升预设调整高度,分别得到在每个预设采集高度下采集的目标地形中各扫描点的测量信息时,首先将目标测距设备上升到某一高度(预设采集高度H1)上,然后得到在该H1预设采集高度上采集的目标地形中各扫描点的测量信息,然后再将目标测距设备垂直上升预设调整高度,到达另一高度(预设采集高度H2)上,得到该预设采集高度H2上采集的目标地形中各扫描点的测量信息。
在本发明实施例中,各预设采集高度上采集目标地形中各扫描点的测量信息过程,参考图8所述的某一预设采集高度下测量信息的确定示意图:
在图8中,矩形1234是目标地形相对于地平面的投影区域的面积最小的外接矩形,1、2、3和4是目标地形相对于地平面的投影区域的面积最小的外接矩形的顶点。在图8中,以每个顶点处均设置一个目标测距设备,目标测距设备为测距感应无人机为例进行说明:
(a)将图8中点1到点2之间的X12距离等分n+1份(n+1越大扫描越精细),并且将感应基标点1上的测距感应无人机UAV-1沿着X12直线向点2移动,每次移动的距离为
3点上方测距感应无人机UAV-3的后方测距感应器随着UAV-1的移动而向左偏移一个角度θ
(b)将图8中点1到点4之间的Y14距离等分m+1份(m越大扫描越精细),并且将感应基标点1上的测距感应无人机UAV-1沿着Y14直线向点4移动,每次移动的距离为
通过上述方式,即可得到某一预设采集高度下的目标地形中各扫描点的测量信息。
(c)在同水平面上通过步骤(a)和(b)将该水平面的目标地形表面360度全方位扫描点三维坐标全部计算出来。四台同水平面的测距感应无人机(UAV-1、UAV-2、UAV-3和UAV-4)同步每次上升一个Δz(Δz越小则测量精度越高),参考图9所述的上升不同水平面扫描目标地形表面的示意图,每上升一次Δz高度,按照步骤(a)和(b)将该水平面的目标地形表面360度全方位扫描点三维坐标全部计算出来,如图7所示。上升到空间中没有目标地形表面时(即目标地形表面可看做是一个点时)则该水平面的高度为地形高度ZH。
在图9中的勘察区域即为目标地形区域。
通过上述方式即可得到各预设采集高度下的目标地形中各扫描点的测量信息。
可选的,目标采集点还包括中心采集点。
示例性的,这里的中心采集点可以是用于采集目标地形中除了目标地形的边界上的扫描点外的扫描点的点。
如图10所示,在利用上述步骤(a)、(b)和(c)可采集到目标地形的边界上的各扫描点的测量信息,但目标地形内部的扫描点的测量信息还没得到,那么用于采集目标地形的内部的扫描点的测量信息的采集点则为中心采集点。
这里的中心采集点的确定方式,与上述的边缘采集点的确定方式一致,即也是将目标地形的内部按照图5中的将点1到点2距离X12的n+1等分、点1到点4距离Y14的m+1等分,形成中心采集点。
可选的,所述确定每个目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的所述目标地形中各扫描点的测量信息,包括:在同一预设采集高度下,若目标测距设备采集的相邻两个中心采集点处的高度的差值大于等于预设差值阈值,则确定目标地形中存在突变区域;对于突变区域,基于每个中心采集点处所对应的目标测距设备和原始边缘采集点处的目标测距设备的测距感应器的感应信息,确定至少两种预设采集高度下在每个中心采集点处采集的目标地形中的突变区域中的各扫描点的测量信息。
示例性的,预设差值阈值可以是预先设置的差值阈值。
在经历过上述步骤(a)、(b)和(c)后,各目标测距设备的高度在ZH上,此时,在上述的目标测距设备上再设置一个目标测距设备,利用该新增的目标测距设备在各中心采集点处采集目标地形的高度,若相邻两个中心采集点处采集的目标地形的高度的差值大于等于预设差值阈值,则说明在这相邻两个中心采集点所对应的目标地形存在凹凸不平的情况,即存储突变区域。
对于突变区域,在某一预设采集高度下(该预设采集高度与上述的边缘采集点时的预设采集高度一致),基于将新增的一个目标测距设备在各中心采集点处进行依次移动,移动顺序与上述边缘采集点的移动顺序一致,这样根据每个中心采集点处所对应的目标测距设备和原始边缘采集点处的目标测距设备的测距感应器的感应信息,具体的可以是重复上述的步骤(a)、(b)和(c),则可确定各预设采集高度下在每个中心采集点处采集的目标地形中的突变区域中的各扫描点的测量信息。
这样即可得到目标地形的边界区域和突变区域的各扫描点的测量信息。
可选的,在所述确定至少两种预设采集高度下在每个中心采集点处采集的目标地形中的突变区域中的各扫描点的测量信息之后,所述方法还包括:获取突变区域的图像,并将突变区域的图像按目标地形的实际比例进行放大;如果突变区域中包括子突变区域,且子突变区域的最大长度大于等于预设长度阈值,则获取子突变区域中各预设扫描点的测量信息。
示例性的,子突变区域可以是在上述突变区域的内部还存在比突变区域的面积更小的突变区域。
预设长度阈值可以是预先设置的长度的阈值。
当确定了突变区域内的各扫描点的测量信息后,还可以增设一个图像采集设备,该图像采集设备用于采集突变区域的图像,当获取突变区域的图像后,根据图像与实际的比例尺,将突变区域的图像按目标地形的实际比例进行放大,在图像上观察是否存在子突变区域,若存在子突变区域,且子突变区域的最大长度大于等于预设长度阈值,则说明该子突变区域有点大,需进行扫描点的测量,具体的测量方式可依据上述步骤(a)、(b)和(c)。若子突变区域的最大长度小于预设长度阈值,则说明该子突变区域可忽略不计,不影响后续的目标地形的整个结构的构建过程。
这样可以基于采集的突变区域的图像,判断突变区域中是否存在子突变区域,若存在,且子突变区域的最大长度大于等于预设长度阈值,则对子突变区域的各扫描点进行测量,这样确保目标地形中的各区域均进行了扫描,保证了目标地形的各扫描点的测量信息的精确性。
这样可根据上述确定的目标地形中各扫描点的测量信息,以及各目标采集点的初始位置信息,对测量信息进行计算,具体的可以是将测量信息与初始位置信息进行对应的换算,即可得到目标地形中各扫描点的目标位置信息。
需要说明的是,在完成上述各个步骤后,则可得到目标地形中各扫描点的目标位置信息,根据该目标位置信息可构建目标地形的三维数据模型,这样即可得到为精确到三维数据模型,解决了现有技术中根据拼接得到的目标地形的目标位置信息后构建的三维数据模型的不精确性。
本发明实施例的技术方案,根据对目标地形进行全貌的扫描,可得到目标地形中的各扫描点的目标位置信息,避免了以局部拼接整合带来的误差和三维数据模型的不精确性的问题。
实施例四
图11为本发明实施例四提供的数据获取装置的结构示意图,如图11所示,该装置包括:目标采集点确定模块31、坐标系构建模块32、测量信息确定模块33和目标位置信息确定模块34。
其中,目标采集点确定模块31,用于基于待扫描的目标地形,确定所述目标地形的目标采集点;
坐标系构建模块32,用于基于所述目标采集点,构建三维空间坐标系,并确定所述目标采集点的初始位置信息;
测量信息确定模块33,用于确定每个所述目标采集点处所对应的目标测距设备在至少两种预设采集高度下采集的所述目标地形中各扫描点的测量信息;
目标位置信息确定模块34,用于基于所述初始位置信息,以及所述目标地形中各扫描点的测量信息,确定所述目标地形中各扫描点的目标位置信息。
在上述实施例的技术方案的基础上,目标采集点确定模块31包括:
目标采集点确定单元,用于获取待扫描的目标地形相对于地平面的投影区域,基于所述相对于地平面的投影区域规划出目标地形的目标采集点。
可选的,所述目标采集点包括边缘采集点。
在上述实施例的技术方案的基础上,目标采集点确定单元具体用于:
获取待扫描的目标地形相对于地平面的投影区域,获取所述目标地形相对于地平面的投影区域的面积最小的外接矩形,基于所述面积最小的外接矩形的各顶点确定所述目标地形的边缘采集点。
可选的,所述边缘采集点包括:所述面积最小的外接矩形的各顶点所组成的初始边缘采集点,以及基于各初始边缘采集点确定的中间边缘采集点。
在上述实施例的技术方案的基础上,坐标系构建模块32包括:
三维空间坐标系构建单元,用于任选一个所述初始边缘采集点作为原点,构建三维空间坐标系;
中间边缘采集点确定单元,用于基于所述初始边缘采集点,将相邻两个初始边缘采集点之间的距离划分为至少两段,将除所述初始边缘采集点之外的端点确定为中间边缘采集点;
初始位置信息确定单元,用于基于至少两个目标测距设备的测距感应器的感应信息分别确定每个所述初始边缘采集点以及所述中间边缘采集点的初始位置信息。
在上述实施例的技术方案的基础上,测量信息确定模块33包括:
第一测量信息确定单元,用于将所述初始边缘采集点处所对应的目标测距设备逐步垂直上升预设调整高度,分别得到在每个所述预设采集高度下采集的所述目标地形中各扫描点的测量信息。
可选的,所述目标采集点包括中心采集点。
在上述实施例的技术方案的基础上,测量信息确定模块33还包括:
突变区域确定单元,用于在同一预设采集高度下,若目标测距设备采集的相邻两个中心采集点处的高度的差值大于等于预设差值阈值,则确定所述目标地形中存在突变区域;
第二测量信息确定单元,用于对于所述突变区域,基于每个所述中心采集点处所对应的目标测距设备和所述原始边缘采集点处的目标测距设备的测距感应器的感应信息,确定至少两种预设采集高度下在每个所述中心采集点处采集的所述目标地形中的所述突变区域中的各扫描点的测量信息。
在上述实施例的技术方案的基础上,测量信息确定模块33还包括:
突变区域图像获取单元,用于获取所述突变区域的图像,并将所述突变区域的图像按所述目标地形的实际比例进行放大;
第三测量信息确定单元,用于如果所述突变区域中包括子突变区域,且所述子突变区域的最大长度大于等于预设长度阈值,则获取所述子突变区域中各预设扫描点的测量信息。
本发明实施例所提供的数据获取装置可执行本发明任意实施例所提供的数据获取方法,具备执行方法相应的功能模块和有益效果。
值得注意的是,上述数据获取装置的实施例中,所包括的各个单元和模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
实施例五
图12为本发明实施例五提供的数据获取系统的结构示意图,如图12所示,该系统包括:数据处理设备100和至少一个目标测距设备200。
其中,数据处理设备100,用于基于待扫描的目标地形,确定所述目标地形的目标采集点,以及基于所述目标采集点,构建三维空间坐标系,并确定所述目标采集点的初始位置信息;
至少一个目标测距设备200,与数据处理设备100通信连接,设置在各目标采集点处,用于采集在至少两种预设采集高度下采集的所述目标地形中各扫描点的测量信息,并将所述测量信息发送至数据处理设备100;
数据处理设备100,用于接收的所述目标地形中各扫描点的测量信息,并基于所述初始位置信息,以及所述目标地形中各扫描点的测量信息,确定所述目标地形中各扫描点的目标位置信息。
示例性的,数据处理设备可以是一个处理器,用于根据获取的待扫描的目标地形,确定该目标地形的目标采集点,以及基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息。
目标测距设备可以是一个用于测距的设备,例如可以是测距感应无人机等。其数量为至少一个。当目标测距设备为一个时,其可绕着目标地形进行圆周运动进行在至少两种预设采集高度下采集所述目标地形中各扫描点的测量信息,并将所述测量信息发送至数据处理设备。
数据处理设备根据获取的各扫描点的测量信息,并基于所述初始位置信息,以及所述目标地形中各扫描点的测量信息,确定所述目标地形中各扫描点的目标位置信息。
可选的,所述目标采集点包括边缘采集点;所述边缘采集点包括:所述目标地形相对于地平面的投影区域的面积最小的外接矩形的各顶点所组成的初始边缘采集点,以及基于各初始边缘采集点确定的中间边缘采集点。
在本发明实施例中,具体的是在各初始边缘采集点处各设置一个目标测距设备。
在各初始边缘采集点处各设置的一个目标测距设备具体用于:
将所述初始边缘采集点处所对应的目标测距设备逐步垂直上升预设调整高度,分别得到在每个所述预设采集高度下采集的所述目标地形中各扫描点的测量信息。
可选的,所述目标采集点包括中心采集点。
在本发明实施例中,在中心采集点处设置一个目标测距设备。
在中心采集点处设置的一个目标测距设备具体用于:
在同一预设采集高度下,若目标测距设备采集的相邻两个中心采集点处的高度的差值大于等于预设差值阈值,则确定所述目标地形中存在突变区域;对于所述突变区域,基于每个所述中心采集点处所对应的目标测距设备和所述原始边缘采集点处的目标测距设备的测距感应器的感应信息,确定至少两种预设采集高度下在每个所述中心采集点处采集的所述目标地形中的所述突变区域中的各扫描点的测量信息。
需要说明的是,本发明实施例中的各测距设备的运动均依靠于数据处理设备的控制,即该数据处理设备还可用于对各测距设备的控制。
需要说明的是,本发明实施例中与上述各实施例中相同或相应的术语的解释在此不再赘述。以及本发明实施例中与上述各实施例中相同或相应的步骤的解释在此不再赘述。
本发明实施例的技术方案,通过设计一种数据获取系统,该系统包括:数据处理设备和至少一个目标测距设备,其中,数据处理设备用于根据获取的待扫描的目标地形,确定该目标地形的目标采集点,以及基于目标采集点,构建三维空间坐标系,并确定目标采集点的初始位置信息。目标测距设备为至少一个,用于在至少两种预设采集高度下采集所述目标地形中各扫描点的测量信息,并将所述测量信息发送至数据处理设备,数据处理设备根据获取的各扫描点的测量信息,并基于所述初始位置信息,以及所述目标地形中各扫描点的测量信息,确定所述目标地形中各扫描点的目标位置信息,这样实现了对非平面区域进行全貌高精度的扫描,避免以局部数据拼接整合得到全局数据而带来的误差的问题。
实施例六
图13为本发明实施例六提供的数据获取系统的结构示意图,本发明实施例与上述实施例五中可选方案可以结合。如图13所示,所述系统还包括:图像采集设备300。
可选的,图像采集设备300置于突变区域中。
可选的,图像采集设备300,与数据处理设备100通信连接,用于获取所述突变区域的图像,并将所述突变区域的图像发送至数据处理设备100中;
数据处理设备100,用于基于所述突变区域的图像,并将所述突变区域的图像按所述目标地形的实际比例进行放大;如果所述突变区域中包括子突变区域,且所述子突变区域的最大长度大于等于预设长度阈值,则获取所述子突变区域中各预设扫描点的测量信息。
示例性的,子突变区域可以是在上述突变区域的内部还存在比突变区域的面积更小的突变区域。
当确定了突变区域内的各扫描点的测量信息后,利用图像采集设备采集突变区域的图像,当获取突变区域的图像后,根据图像与实际的比例尺,将突变区域的图像按目标地形的实际比例进行放大,在图像上观察是否存在子突变区域,若存在子突变区域,且子突变区域的最大长度大于等于预设长度阈值,则说明该子突变区域有点大,需进行扫描点的测量,具体的测量方式可依据上述实施例三中的步骤(a)、(b)和(c)。若子突变区域的最大长度小于预设长度阈值,则说明该子突变区域可忽略不计,不影响后续的目标地形的整个结构的构建过程。
这样可以基于采集的突变区域的图像,判断突变区域中是否存在子突变区域,若存在,且子突变区域的最大长度大于等于预设长度阈值,则对子突变区域的各扫描点进行测量,这样确保目标地形中的各区域均进行了扫描,保证了目标地形的各扫描点的测量信息的精确性。
需要说明的是,本发明实施例中的图像采集设备也依靠于数据处理设备的控制,即该数据处理设备还可用于对图像采集设备的控制。
需要说明的是,本发明实施例中与上述各实施例中相同或相应的术语的解释在此不再赘述。以及本发明实施例中与上述各实施例中相同或相应的步骤的解释在此不再赘述。
本发明实施例的技术方案,通过在系统中增设图像采集设备,该图像采集设备用于获取突变区域的图像,并将突变区域的图像发送至数据处理设备中;数据处理设备基于所述突变区域的图像,并将所述突变区域的图像按所述目标地形的实际比例进行放大;如果所述突变区域中包括子突变区域,且所述子突变区域的最大长度大于等于预设长度阈值,则获取所述子突变区域中各预设扫描点的测量信息,这样可以基于采集的突变区域的图像,判断突变区域中是否存在子突变区域,若存在,且子突变区域的最大长度大于等于预设长度阈值,则对子突变区域的各扫描点进行测量,这样确保目标地形中的各区域均进行了扫描,保证了目标地形的各扫描点的测量信息的精确性。
实施例七
图14为本发明实施例七提供的数据获取系统的结构示意图,本发明实施例的技术方案可以是上述实施例五和实施例六的一种优选的方案,具体的数据获取系统如图14所示:
在图14中,A为目标测距设备,这里的目标测距设备可以是用于进行测距的设备,例如可以是测距感应无人机等。测距感应无人机的上下左右前后六个方向有测距感应器,且这六个测距感应器具有可旋转实现角度调整。
这里的目标测距设备的数量为5个,其中目标测距设备A1、A2、A3和A4位于上述实施例中的目标地形相对于地平面的投影区域的面积最小的外接矩形中的四个顶点处,用于采集在至少两种预设采集高度下采集的所述目标地形的边界上的各扫描点的测量信息。
目标测距设备B为从上到下在至少两种预设采集高度下采集目标地形的地表距离,确定目标地形中是否具有突变区域,若具有突变区域,则利用该目标测距设备B,以及目标测距设备A1、A2、A3和A4结合获取突变区域中的各扫描点的测量信息。
图14中,具有集控器,该集控器的功能与上述实施例五中的数据处理设备的功能一样,其用于控制上述各目标测距设备的运动。
在图14中的,C为图像采集设备,该图像采集设备可以是一个具有拍摄功能的无人机,该图像采集设备用于采集突变区域的图像,并将该突变区域的图像发送至集控器中,集控器对获取的突变区域的图像进行分析,判断该突变区域内是否有子突变区域,若有子突变区域,且子突变区域的最大长度大于等于预设长度阈值,则利用上述目标测距设备B,以及目标测距设备A1、A2、A3和A4结合获取子突变区域中的各扫描点的测量信息。
图14中的集控器,还用于获取上述各目标侧距设备获取的目标地形的各扫描点的测量信息,对测量信息进行分析,得到目标地形的各扫描点的目标测量信息。
在图14中,还具有3D模型生成展示器,当利用集控器获取目标地形的各扫描点的目标测量信息后,将该目标地形的各扫描点的目标测量信息输入至3D模型生成展示器中,3D模型生成展示器可基于该目标地形的各扫描点的目标测量信息生成目标地形的三维数据模型,并可在该3D模型生成展示器进行展示该目标地形的三维数据模型,这样可使用户更加生动、直观的看到目标地形的具体形态,以便在目标地形上进行施工。
需要说明的是,在本发明实施例中仅简单说明了数据获取系统中的各设备的功能,但不代表其仅有这些功能。本发明实施例是数据获取系统的一种优选方案,其中的术语的解释,以及方案的步骤实施与上述数据获取方法的各发明实施例一致,这里不做详细解释。
注意,上述仅为本发明的较佳实施例及所运用技术原理。本领域技术人员会理解,本发明不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。因此,虽然通过以上实施例对本发明进行了较为详细的说明,但是本发明不仅仅限于以上实施例,在不脱离本发明构思的情况下,还可以包括更多其他等效实施例,而本发明的范围由所附的权利要求范围决定。
- 传输装置、数据获取装置、由调温装置和数据获取装置构成的系统、电池系统以及状态数据传输方法
- 数据传送系统、数据获取设备、数据获取方法、数据积累设备、数据传输方法