一种提高机载目标航迹融合精度的方法
文献发布时间:2023-06-19 10:19:37
技术领域
本申请属于航迹数据处理技术领域,特别涉及一种提高机载目标航迹融合精度的方法。
背景技术
机载目标航迹融合系统是一个复杂的非线性系统,数学模型比较复杂,在实际作战中,由于战场环境、攻击条件以及目标运动等的复杂性,导致目标航迹融合的精度受到多种因素的影响,且各种影响因素并非单独作用于目标航迹融合系统,往往多种影响因素同时存在并伴随着较强的交互耦合效应。传统航迹融合精度分析工作中,大量研究多建立在近似线性、影响因素独立假设条件基础上,以此前提开展精度统计与静态分析,无法体现因素间耦合关系对融合精度的影响,结果不够全面,不利于目标航迹融合算法的优化;部分适用于非线性、多影响因素的灵敏度分析方法对模型精度有很高要求,且计算量巨大,实际应用较难。
发明内容
为了解决上述问题,本申请提供一种基于Inception-CNN的目标航迹融合精度影响因素分析方法,能对各传感器量测数据及航迹融合结果进行分析,得到影响航迹融合精度的主要因素,并据此对传感器提出要求,或对目标航迹融合算法进行策略级优化,提升算法性能,为战场态势感知能力的提升提供技术支撑。
本申请提高机载目标航迹融合精度的方法,包括:
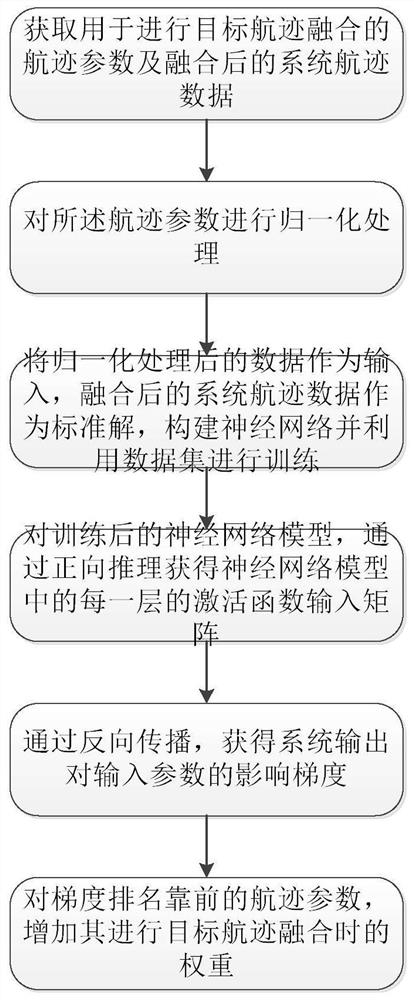
步骤S1、获取用于进行目标航迹融合的航迹参数及融合后的系统航迹数据;
步骤S2、对所述航迹参数进行归一化处理;
步骤S3、将归一化处理后的数据作为输入,融合后的系统航迹数据作为标准解,构建神经网络并利用数据集进行训练;
步骤S4、对训练后的神经网络模型,通过正向推理获得神经网络模型中的每一层的激活函数输入矩阵;
步骤S5、通过反向传播,获得系统输出对输入参数的影响梯度;
步骤S6、对梯度排名靠前的航迹参数,增加其进行目标航迹融合时的权重。
优选的是,步骤S1中,所述航迹参数至少包括雷达目标北、天、东三向速度、雷达目标北、天、东三向位置、光雷目标俯仰角、光雷目标距离。
优选的是,步骤S2中,归一化处理包括:
其中,x为输入的航迹参数,A(x)为输入的航迹参数的平均值,σ(x)为输入的航迹参数的标准差。
优选的是,步骤S3中,所述神经网络包括一个Inception-CNN结构和三个全连接层。
优选的是,步骤S5中,所述反向传播包括:
根据卷积网络下一层的灵敏度矩阵与总输出,计算当前卷积层的灵敏度。
优选的是,步骤S6中,增加航迹参数进行目标航迹融合时的权重包括:调整算法中该航迹参数的修正参数,或者调整算法结构中该航迹参数对应的算法。
本申请在多特征原始数据集中使用卷积网络建模相比于传统神经网络优势十分明显,因为卷积的特征提取功能在多特征数据中可以采集更多的局部特征信息。当面对机载目标航迹融合系统时,基于Inception-CNN的目标航迹融合精度影响因素分析方法相比传统方法有更强的特征提取能力,对数据集的拟合效果和灵敏度分析结果的精确度都有所提升,因此可以更加精确的给出融合算法的优化方案。
附图说明
图1是本申请提高机载目标航迹融合精度的方法的流程图。
图2是本申请神经网络输入模型示意图。
图3是本申请Inception-CNN网络结构图。
图4是本申请全连接层结构示意图。
图5是本申请基于输入特征图和卷积核的输出结果计算示意图。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施方式中的附图,对本申请实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。下面结合附图对本申请的实施方式进行详细说明。
本例利用基于Inception-CNN的航迹融合精度影响因素分析方法对机载目标航迹融合算法的某一组数据进行分析,并结合分析结果给出融合算法优化方案。
如图1所示,本申请的提高机载目标航迹融合精度的方法,主要包括:
步骤S1、获取用于进行目标航迹融合的航迹参数及融合后的系统航迹数据;
步骤S2、对所述航迹参数进行归一化处理;
步骤S3、将归一化处理后的数据作为输入,融合后的系统航迹数据作为标准解,构建神经网络并利用数据集进行训练;
步骤S4、对训练后的神经网络模型,通过正向推理获得神经网络模型中的每一层的激活函数输入矩阵;
步骤S5、通过反向传播,获得系统输出对输入参数的影响梯度;
步骤S6、对梯度排名靠前的航迹参数,增加其进行目标航迹融合时的权重。
步骤S1-步骤S3中,构建神经网络数据输入模型,将待分析的各传感器的各类量测数据引入神经网络输入模型。
其中,神经网络输入模型为5*5的矩阵,如图2所示,包括传感器量测数据为雷达目标北、天、东三向速度、雷达目标北、天、东三向位置、光雷目标俯仰角、光雷目标距离等。
对输入模型的数据进行标准化处理,公式如下:
其中,x为输入参数,A(x)为输入参数的平均值,σ(x)为输入参数的标准差。
以传感器量测数据作为输入,融合后的系统航迹数据作为标准解,构建神经网络并利用数据集进行训练,以此获得每个网络节点的参数;
该步骤所构建的神经网络是指:通过输入参数,经过各网络节点的计算,得到融合后的系统航迹数据,神经网络如图3所示,训练过程包括:输入参数为步骤S2修订的参数,设定初始的网络节点的参数之后,计算输出,该输出与融合后的系统航迹数据对比后,不断修订网络节点的各个参数,最终得到神经网络模型。
本申请中,步骤S3构建神经网络模型,并对模型进行训练,这里使用的是一个Inception-CNN结构和3个全连接层,神经网络模型如图3所示,全连接层如图4所示。
步骤S4中,取一组数据,对训练后的神经网络模型,进行正向推理,并记录每一层的激活函数输入矩阵。本例中,激活函数输入矩阵可以理解为该层神经网络每个节点的权值及偏移量。
步骤S5中,利用类似反向传播的方法,求系统输出对输入参数的梯度,以此计算目标航迹融合算法的全局灵敏度。
举例来说,卷积网络包含卷积层和池化层,假设输入特征图和卷积核如图5所示。图5中,输入input矩阵大小为4*4,卷积核filter大小为2*2,卷积结果为output,以o
o
o
假设卷积网络下一层的灵敏度矩阵为δ,总输出为E,则以i
通过分析每个输入参数对融合结果的影响,优先关注灵敏度较高的输入参数,并对该参数相关的融合算法进行优化处理。
本申请步骤S6中,对梯度排名靠前的航迹参数,增加其进行目标航迹融合时的权重,这里的靠前例如对上述案例的25个输入参数,获取梯度排名靠前的5个输入参数,针对这5个参数,进行航迹目标融合算法的修改。
在一些可选实施方式中,步骤S6中,增加航迹参数进行目标航迹融合时的权重包括:调整算法中该航迹参数的修正参数,或者调整算法结构中该航迹参数对应的算法。
本例数据集采用的是基于同源目标的机载传感器目标数据(雷达、光雷、电子对抗、数据链),共有302个样本,25个特征,并与传统Sobol灵敏度分析方法进行了比较,结果表明本发明方法在多特征原始样本数据集中可以取得理想的计算结果,且相比与传统方法计算速度更快,精度更高,通过灵敏度分析可以得到雷达的距离和方位角属性对目标航迹融合算法的精度影响度较大,因此通过调整这两个属性相关的融合参数来提高算法的融合精度。
本申请在多特征原始数据集中使用卷积网络建模相比于传统神经网络优势十分明显,因为卷积的特征提取功能在多特征数据中可以采集更多的局部特征信息。当面对机载目标航迹融合系统时,基于Inception-CNN的目标航迹融合精度影响因素分析方法相比传统方法有更强的特征提取能力,对数据集的拟合效果和灵敏度分析结果的精确度都有所提升,因此可以更加精确的给出融合算法的优化方案。
以上所述,仅为本申请的具体实施方式,但本申请的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本申请揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本申请的保护范围之内。因此,本申请的保护范围应以所述权利要求的保护范围为准。
- 一种提高机载目标航迹融合精度的方法
- 一种提高机载光电系统目标定位精度的校靶方法