一种摘果方法
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及机器人技术领域,具体涉及一种摘果方法。
背景技术
在水果生产作业中,果实采摘约占整个作业量的33-50%,农民对于较高树上的果实,用采摘装置手动对果实进行逐个采摘。农民先在树下观察果实位置,然后将采摘装置靠近果实,手动调整位置,然后手动将枝干剪断,再将果实捡起。采摘装置往往是剪刀或者三抓机械手,这种采摘方式,劳动强度大,而且生产效率非常低。若是农民直接爬树进行采摘,则存在很大的安全隐患。
国内外关于对爬树机器的研究中,主要是从机械结构上和仿生角度上进行机构的设计,其中主要包括:1、美国宾西尼亚大学研究人员研制出的一款新型爬树机器人Risev3,Risev3主要是从机械结构上进行设计,其包括四个脚,在其脚部位置采用针状突齿,便于在垂直物体上进行移动;2、美国卡耐基-梅隆大学研究的蛇形机器人,其为在仿生角度上进行设计,实为六足机器人,能像蟑螂一样贴着爬行;3、香港研发的Tree bot,其是前两者的结构,由3个由伸缩功能的连接杆组成,像毛毛虫的蠕行一样,机械爪配备相关触觉传感器,从而实现行走。
但是,上述三种主流的爬树机器人均存在一定的缺陷,Rise v3对机械的零部件要求较高、蛇形机器人成本昂贵,而且自动化水平不高,仍需要人工进行控制进而来完成一系列流程,此外,工作形式单一,仅仅完成爬树动作,工作效率低,而Tree bot的触觉传感器的稳定性不佳。
本发明中的发明人已在申请号为CN201822177334.2,公告日为2020.01.07的专利文献中公开了及一种环抱式果实采摘机,内环臂呈筒状且用于套设在树干的外周,外环臂的外环板沿内环臂的中心轴周向环绕设置,伸缩机构包括伸缩气缸和伸缩导轨,各个外环板分别通过伸缩气缸连接于内环臂的外部,且伸缩气缸能够伸缩使外环板沿内环臂径向移动,伸缩导轨连接在外环板的底面与内环臂的底面,爬行机构设置在各外环板上且穿过内环臂,爬行机构的滑动轮抵接于树干的外表面,摘果机构中的机械爪通过机械臂设置在外环板上,紧锁机构包括紧锁气缸和可刺入树木表面的插针;环抱式果实采摘机还包括控制系统。该果实采摘机能够实现攀爬与采摘的智能化,使其能在树干上停留,采摘果实。
但是,该专利文献公开的果实采摘机的摘果方法只能从机械手的设置方法进行摘果,摘果的角度有限,从而导致摘果的效果不高,另外摘果过程中,使用者需要控制多个机械手进行摘果操作复杂,需要进行改进。
发明内容
本发明提供一种采摘效率高、采摘角度广、操作简单的摘果方法,利用本发明的方法,可快速采摘任意角度的果实。
为达到上述目的,本发明的技术方案是:一种摘果方法,包括采摘机,采摘机包括内环部、外环部、伸缩气缸、爬行机构和采摘机构;
所述内环部共设有两个以上内环架和用于连接内环架的连接件,内环架之间可拆卸连接,所述内环架包括内上环、内下环和内环连接杆,内上环和内下环分别呈相同的圆弧状,内环连接杆的两端分别固定连接内上环和内下环,内上环和内下环上分别设有连接滑槽和第一固定孔位,连接件与连接滑槽匹配设置,连接件上设有第二固定孔位和用于连接第一固定孔位和第二固定孔位的连接销,内环部用于套设在树干的外周,所述外环部包括两个以上的外环架,所述外环架包括外上环、外下环和外环连接杆,外环连接杆的两端分别固定连接外上环和外下环,所述外环部沿内环部的中心轴轴向环绕设置,外上环和外下环上设有滑动槽;伸缩气缸的缸体连接在内环架上,伸缩气缸的活塞杆转动连接有伸缩滑轮,伸缩滑轮滑动连接在外环架的滑动槽内;
爬行机构包括滑动轮、滑动轮支架和设置在所述滑动轮内且驱动所述滑动轮转动的爬行电机,各个滑动轮通过滑动轮支架设置在外环架上且沿其内环部的中心轴轴向环绕设置;所述爬行电机的输出端连接有蜗轮蜗杆减速器,爬行电机的输出端通过蜗轮蜗杆减速器驱动滑动轮;
采摘机构包括环形滑轨和滑动设置在所述环形滑轨上的切割机械手,环形滑轨包括两个以上圆弧状的小滑轨,两个以上圆弧状的小滑轨形成一个环状,两个以上小滑轨一端设有连接槽,另一端设有连接块,小滑轨之间通过连接槽和连接块插接配合可拆卸连接,所述小滑轨沿所述内环部的中心轴轴向环绕设置,环形滑轨固定连接在伸缩气缸上,切割机械手包括滑动底座、设置在所述滑动底座上的滑动电机、摆动臂、设置在所述滑动底座一侧且驱动所述摆动臂的第一摆动电机、转向电机、切割座、切割电机和设置在切割座上的圆锯片,滑动底座底部设置有螺纹万向球,滑动电机的输出端连接有驱动轮,驱动轮与环形滑轨滚动连接,切割座活动设置在摆动臂远离滑动底座的一端,转向电机固定设置在摆动臂上,转向电机的输出端固定连接切割座,切割电机固定设置在切割座上,圆锯片转动设置在切割座上,切割电机的输出端与圆锯片连接;
所述摆动臂包括两个对称设置在滑动基座上的摆动杆和连接板,摆动杆对称设置并铰接在滑动基座,连接板在摆动杆远离滑动基座的一端固定连接在两个摆动杆之间;所述第一摆动电机固定设置在滑动基座的一侧,第一摆动电机的输出端与摆动杆固定连接;
所述滑动基座在远离第一摆动电机的一侧还设有第二摆动电机;所述摆动臂靠近第一摆动电机一侧的摆动杆上铰接有第一小臂,所述摆动臂远离第一摆动电机一侧的摆动杆上铰接有第二小臂,第一小臂和第二小臂分别与滑动基座两侧的摆动杆转动连接,第一小臂和第二小臂与连接板固定连接;第二小臂上还铰接有连接拉杆,连接拉杆另一端铰接有旋转杆,旋转杆的另一端与第二摆动电机的输出端连接;
摘果方法包括以下步骤:
(1)将内环部的内环架拆卸,拔出用于连接第一固定孔位和第二固定孔位的连接销,拆卸连接内环架之间的连接件,将内环架夹持在待摘果的树干外,通过连接件将内环架连接,用连接销穿过第一固定孔位和第二固定孔位,完成内环部安装在树干外,且两个以上小滑轨在伸缩气缸的带动下组成环形滑轨;
(2)驱动爬行电机带动滑动轮转动;
(3)驱动设置在内环部和外环部上的伸缩气缸,根据树干外径进行调整滑动轮的位置
(4)当采摘机移动至适当位置,爬行电机停止驱动,驱动伸缩气缸调节行程锁紧;
(5)滑动电机驱动切割机械手沿环形滑轨滑动至合适位置;
(6)通过驱动第一摆动电机、第二摆动电机、转向电机来调节切割机械手;
(7)驱动切割机械手上的圆锯片对果实进行切割采摘。
以上方法,内环部和外环部同轴设置,且内环部套于树干外周,当使用环抱式椰果切割采摘机时,拔出用于连接第一固定孔位和第二固定孔位的连接销,拆卸连接内环架之间的连接件,将内环架夹持在树干外,通过连接件将内环架连接,用连接销穿过第一固定孔位和第二固定孔位,完成安装;通过内环架和外环架的轻量化的设计,取代原有的圆弧状的板式架构,既节省了在圆弧状的板式架构上开孔的制造工序,同时也大大地减轻了环抱式椰果切割采摘机的重量;通过设置在外环部与内环部之间的伸缩气缸和连接在外环部上可转动抵接于树干外表面的滑动轮配合,通过伸缩气缸推动外环臂沿其径向移动配合滑动轮的转动能够使环抱式椰果切割采摘机沿树干稳定地上下移动,且适用于不同直径大小的椰子树;环抱式椰果切割采摘机移动至适当位置,爬行电机停止驱动,伸缩气缸驱动活塞杆收紧,伸缩滑轮转动并在滑动槽上滑动,从而通过外环架带动滑动轮夹持树干的外表面,同时蜗轮蜗杆减速器自锁防止滑动轮滑动,两者共同作用使得环抱式椰果切割采摘机可以锁紧固定在树干上;当切割机械手通过滑动电机驱动可沿环形滑轨滑动至环形的任意位置进行采摘,切割机械手设有第一摆动电机和转向电机,切割机械手可进行多轴变动,采摘任意角度的椰子,通过切割电机驱动圆锯片对果柄进行切割,这样,可快速切断椰子与果树连接的果柄;另外,伸缩气缸直接连接在内环架和外环架上,这样设置减少了内环部及外环部的重量,从而使得环抱式椰果切割采摘机更加便于携带、使用;另外由于在内上环和内下环上设置有连接滑槽,连接滑槽与连接件匹配设置,实现多个内环架之间通过连接件实现可拆卸连接,由于在内环架上设置有连接滑槽,一方面能方便连接件连接另一方面也能减轻内环架的重量,且使得内环部能进行更好地固定,确保小滑轨滑动的稳定性,且在外上环和外下环上设有滑动槽,伸缩滑轮在滑动槽内滑动实现伸缩气缸可靠的滑动,结构稳定性好,同时通过第一摆动电机带动摆动杆摆动,第二摆动电机带动连接拉杆进而带动连接块绕着第一小臂和第二小臂摆动,结构简单且可靠,且第一摆动电机和第二摆动电机都设置在滑动基座上,从而使得摆动臂的中心下移,使得摆动臂的移动更加可靠,在摘果过程中在将内环部环抱在树干上时,通过连接件固定内环架之间的固定,从而使得内环部进行固定且同时使得两个以上小滑轨组成环形滑轨,然后驱动爬行电机转动使得摘果机爬行到合适的位置,在爬行过程中根据不同的树干直径调整滑动轮的内径从而方便移动,然后到达预设位置时摆动臂移动到合适位置进行摘果操作,操作简单,且只需要调整摆动臂的位置即可实现广角度范围的摘果。
进一步的,所述伸缩气缸为弹簧气缸,所述弹簧气缸的缸体连接于所述的内环架上,所述弹簧气缸的活塞杆连接于所述外环架上;当所述弹簧气缸中的弹簧处于自然状态时,各个所述滑动轮形成的圆环的内径小于树干的外径,这样,环抱式椰果切割采摘机攀爬树干时更加稳定。
进一步的,内环连接杆设置有两个以上,且相邻内环连接杆之间具有间距,滑动轮穿过两个相邻内环连接杆之间的间距设置,这样,这样既能使得滑动轮传射设置又能减轻整个内环部的重量。
进一步的,伸缩滑轮包括伸缩滑轮座和位于伸缩滑轮座上两侧的滑轮,伸缩滑轮座的中间位置设有伸缩滑轮连接孔,伸缩滑轮连接孔内固定有伸缩连接杆,伸缩连接杆与伸缩气缸的活塞杆铰接,这样,通过在伸缩滑轮座上设置伸缩滑轮连接孔,方便与伸缩气缸的活塞杆相连。
进一步的,所述切割电机的输出端通过皮带传动的方式与圆锯片连接,这样,切割座体积更合理,便于切割。
进一步的,连接滑槽为内上环和内下环上远离外环部的一侧面上向靠近外环部凹陷的凹槽;滑动槽为外上环和外下环上靠近内环部的一侧面上向远离内环部凹陷的凹槽,这样,滑动槽能方便伸缩滑轮在滑槽中移动,且连接滑槽能方便连接件的连接。
进一步的,所述伸缩气缸上设有压力传感器,便于调节伸缩气缸活塞杆的行程。
进一步的,所述步骤(3)中具体包括:通过压力传感器实时检测伸缩气缸的压力值大小来调节伸出或缩回伸缩气缸的活塞杆的行程,实现根据树干的外径大小进行调节各个滑动轮形成的内环形的内径大小,以上,通过压力传感器检测压力值实现调整伸缩气缸,使得调节可靠性高。
进一步的,步骤(5)具体包括:滑动电机带动驱动轮转动并在螺纹万向球的导向下沿着环形滑轨移动到合适位置,以上设置,滑动电机在螺纹万向球导向下移动,使得摆动臂更加可靠地在环形滑轨上滑动。
附图说明
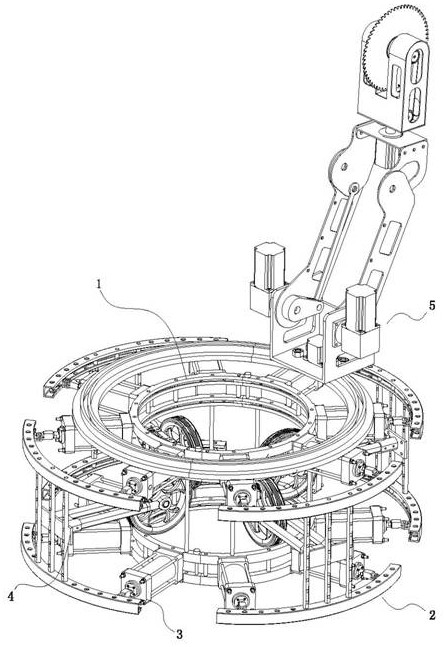
图1为本发明的立体结构示意图。
图2为本发明的爆炸结构示意图。
图3为本发明中外环架和爬行机构的结构示意图。
图4为本发明中采摘机构的结构示意图。
图5为本发明中切割机械手的立体结构示意图。
图6为本发明中内环架的结构示意图。
图7为本发明中小滑轨的结构示意图。
图8为本发明中伸缩滑轮的结构示意图。
具体实施方式
下面结合附图和具体实施方式对本发明做进一步详细说明。
如图1-图8所示,一种摘果方法,将摘果机环抱在待摘果的树干上进行摘果操作,采摘机,包括内环部1、外环部2、伸缩气缸3、爬行机构4和采摘机构5。
所述内环部1共设有两个以上内环架11和用于连接内环架11的连接件110,内环架11之间可拆卸连接,所述内环架11包括内上环111、内下环112和内环连接杆113,内上环111和内下环112分别呈相同的圆弧状,内环连接杆113的两端分别固定连接内上环111和内下环112,内上环111和内下环112上分别设有连接滑槽114和第一固定孔位115,连接滑槽114为内上环111和内下环112上远离外环部的一侧面上向靠近外环部凹陷的凹槽,连接件110与连接滑槽114形状匹配,连接件110上设有第二固定孔位116和用于连接第一固定孔位115和第二固定孔位116的连接销117,内环部1用于套设在树干的外周,所述外环部2包括两个以上的外环架21,所述外环架21包括外上环211、外下环212和外环连接杆213,外环连接杆213的两端分别固定连接外上环211和外下环212,所述外环部2沿内环部1的中心轴轴向环绕设置,外上环211和外下环212上设有滑动槽214;滑动槽214为外上环211和外下环212上靠近内环部的一侧面上向远离内环部凹陷的凹槽。
伸缩气缸3的缸体固定连接在内环架11上,伸缩气缸3的活塞杆转动连接有伸缩滑轮31,伸缩滑轮31滑动连接在外环架21的滑动槽214内,内环连接杆113设置有两个以上,且相邻内环连接杆113之间具有间距,伸缩滑轮31包括伸缩滑轮座311和位于伸缩滑轮座上两侧的滑轮312,伸缩滑轮座311的中间位置设有伸缩滑轮连接孔3111,伸缩滑轮连接孔3111内固定有伸缩连接杆3112,伸缩连接杆与伸缩气缸的活塞杆铰接,本实施例中滑轮312具有四个,且四个滑轮的两侧分别与滑动槽214的两内侧壁滑动连接。
爬行机构4包括滑动轮41、滑动轮支架42和设置在所述滑动轮内且驱动所述滑动轮转动的爬行电机43,各个滑动轮41通过滑动轮支架42设置在外环架21上且沿其内环部1的中心轴轴向环绕设置,滑动轮41抵接于树干的外表面;所述爬行电机43的输出端连接有蜗轮蜗杆减速器44,爬行电机43的输出端通过蜗轮蜗杆减速器44驱动滑动轮41,滑动轮41穿过两个相邻内环连接杆113之间的间距,相邻内环连接杆之间的间距大于或等于滑动轮41的厚度,滑动轮支架42包括支架连接座421和支架连接杆422,支架连接座421的一端固定在外环连接杆213上,支架连接座421与支架连接杆422固定连接,且滑动轮41的两侧与支架连接杆422相连,一滑动轮支架42上固定有爬行电机43。
采摘机构5包括环形滑轨51和滑动设置在所述环形滑轨51上的切割机械手52,环形滑轨51包括两个以上的圆弧状的小滑轨511,两个以上的圆弧状的小滑轨511组成一个环形滑轨51,小滑轨511包括滑槽5111和设置在滑槽5111两侧的导向台5112,所述滑槽5111的两侧壁设有向内向下延伸的限位板,限位板的末端与滑槽5111的底部设有间隙51111,导向台5112为弧形设置的中空管体结构,滑槽5111的一内侧壁上设有齿条(图中未示意出来),所述小滑轨511沿所述内环部1的中心轴轴向环绕设置,两个小滑轨511的底部分别焊接在伸缩气缸3上,切割机械手52包括滑动底座521、设置在所述滑动底座521上的滑动电机522、摆动臂523、设置在所述滑动底座521一侧且驱动所述摆动臂523的第一摆动电机5241、转向电机525、切割座526、切割电机5261和设置在切割座526上的圆锯片5262,滑动底座521底部设置有螺纹万向球5211,滑动电机522的输出端连接有驱动轮,驱动轮5221与环形滑轨51滚动连接,驱动轮5221的两侧位置滑槽5111的间隙51111内,且驱动轮5221与滑槽5111一侧的齿条相齿合,在滑动电机522驱动下驱动轮5221运动,螺纹万向球5211与导向台5112相匹配,对驱动轮5221的运动起到导向作用。
切割座526活动设置在摆动臂523远离滑动底座521的一端,转向电机525固定设置在摆动臂523上,转向电机525的输出端固定连接切割座526,切割电机5261固定设置在切割座526上,圆锯片5262转动设置在切割座526上,切割电机5261的输出端与圆锯片5262连接。
为实现智能化攀爬树与采摘果实,替代人工操作,所述环抱式椰果切割采摘机还包括控制系统,所述控制系统包括探测装置,所述探测装置设置在所述外上环211的顶部,所述探测装置包括用于探测树木的特性数据的视觉模块;传输模块,用于接收移动终端发送的远程操作指令并发送指令;储存模块,用于存储所述传输模块接收的操作指令;处理器,用于接收所述探测装置和所述传输模块发送的指令;所述处理器分别与所述伸缩气缸3、爬行电机43、滑动电机522、第一摆动电机5241、第二摆动电机5242、转动电机525、切割电机5261电性连接,所述伸缩气缸3上设有压力传感器,便于调节伸缩气缸活塞杆的行程,通过压力传感器实时检测伸缩气缸的压力值来调节伸缩气缸的活塞杆的行程,从而根据树干的外径大小进行调节各个滑动轮形成的内环形的内径大小,保证滑动轮与树干外周达到最佳的抵接程度,起到一定的避震作用,减少爬行过程中产生的震动,若树干直径增大时,压力传感器检测到伸缩气缸的压力值增大,从而将伸缩气缸的活塞杆的行程增大,这时外环架向远离内环架方向移动,从而使得外环架带动滑动轮远离内环部移动,增大滑动轮与树干之间的距离。
其中,所述处理器为STM32处理器。
探测装置将检测到的数据反馈至处理器,通过移动终端通过传输模块和存储模块发出的操作指令,处理器通过分别控制伸缩气缸3、爬行电机43、滑动电机522、第一摆动电机5241、第二摆动电机5242、转动电机525、切割电机5261的运动,从而实现精准控制采摘机的攀爬路径、攀爬速度、采摘方式等;其中,所述移动终端可为手机、平板电脑或者电脑,所述传输模块可为蓝牙、无线宽带、无线射频识别、GPRS、GSM、3G、4G、5G通信传输的一种,将传输模块接收到的操作指令存储至存储模块,再通过传输模块发送至处理器中作为各种命令指令,实现远程控制。
所述伸缩气缸3为弹簧气缸,所述弹簧气缸的缸体固定连接于所述的内环架上,内环架上靠近外环架的一侧面上设有向外凸设的安装凸块1111,伸缩气缸的缸体的一端固定在安装凸起上,所述弹簧气缸的活塞杆活动连接于所述外环架21上;当所述弹簧气缸中的弹簧处于自然状态时,各个所述滑动轮41形成的圆环的内径小于树干的外径,这样,环抱式椰果切割采摘机攀爬树干时更加稳定。
所述摆动臂523包括两个对称设置在滑动基座521上的摆动杆5231和连接板5232,摆动杆5231对称设置并铰接在滑动基座,连接板5232在摆动杆5231远离滑动基座521的一端固定连接在两个摆动杆5231之间;所述第一摆动电机5241固定设置在滑动基座521的一侧,第一摆动电机5241的输出端与摆动杆5231固定连接,这样,两个摆动杆5231与连接板5232连接稳定。
所述滑动基座521在远离第一摆动电机5241的一侧还设有第二摆动电机5242;所述摆动臂523靠近第一摆动电机5241一侧的摆动杆上5231铰接有第一小臂5233,所述摆动臂523远离第一摆动电机5241一侧的摆动杆5231上铰接有第二小臂5234,第一小臂5233和第二小臂5234分别与滑动基座521两侧的摆动杆5231转动连接,第一小臂5233和第二小臂5234与连接板5232固定连接;第二小臂5234上还铰接有连接拉杆5235,连接拉杆5235另一端铰接有旋转杆5236,旋转杆5236的另一端与第二摆动电机5242的输出端连接;所述处理器与第二摆动电机电连接,以上设置,当第一摆动电机5241驱动时,使得摆动臂523以摆动杆5231与滑动基座521为轴转动;当第二摆动电机5242转动时,第二摆动电机5242的输出端通过带动旋转杆5236从而带动切割机械手52以第一小臂5233、第二小臂5234与摆动杆5231连接处为轴转动,便于切割采摘,另外第二摆动电机5242设置在下方,使得第二摆动电机5242重心下移,且便于摆动臂523的平稳。
所述切割电机5261的输出端通过皮带传动的方式与圆锯片5262连接,这样,切割座体积更合理,便于切割。
所述外环部2共包括4个外环架21,这样,使采摘机整体受力更均匀,提高结构稳定性。
每个外环架21上分别设有4个伸缩气缸3,伸缩气缸3的缸体分别固定连接于内上环111和内下环112,伸缩气缸3的活塞杆分别连接于外上环211和外下环212,这样,通过伸缩气缸3的缸体固定连接内环部1和外环部2,内环部1和外环部2受力更加均匀,能提供足够的径向拉力和对树干表面的压力,保证结构稳定性的同时使得结构更加紧凑,减轻采摘机的重量。
所述内环部1的内环架11通过插销可拆卸连接,这样,便于内环架11之间进行连接或者拆卸。
所述蜗轮蜗杆减速器44为NRV减速器,NRV减速器机械结构紧凑,能耗低,便于采摘机长时间作业。
其中,本实施例中的环抱式果实采摘机主要应用于攀爬棕榈科植物,特别是采摘椰子等果实。
本发明的工作原理:内环部和外环部同轴设置,且内环部套于树干外周,当使用环抱式椰果切割采摘机时,拔出用于连接第一固定孔位和第二固定孔位的连接销,将内环部的内环架拆开,将内环架夹持在树干外,通过连接件将内环架连接,用连接销穿过第一固定孔位和第二固定孔位,完成安装;通过内环架和外环架的轻量化的设计,取代原有的圆弧状的板式架构,既节省了在圆弧状的板式架构上开孔的制造工序,同时也大大地减轻了环抱式椰果切割采摘机的重量;通过设置在外环部与内环部之间的伸缩气缸和连接在外环部上可转动抵接于树干外表面的滑动轮配合,在抱住树干时,伸缩气缸伸出,从而带动多个内环架向树干靠拢,伸缩气缸的活塞杆的一端伸出并在滑槽中滑动,给伸缩气缸的伸长提供活动空间,且在伸缩气缸移动过程中带动多个小滑轨向树干移动并拼接成一个环状滑轨,爬行气缸启动带动滑动轮在树干上滚动,若树干的直径增大时,伸缩气缸伸出从而带动外环架向远离内环部的方向移动,从而外环架带动滑动轮向外移动以适应树干直径的增大,从而确保稳定移动且适用于不同直径大小的椰子树;环抱式椰果切割采摘机移动至适当位置,爬行电机停止驱动,伸缩气缸驱动活塞杆收紧,伸缩滑轮转动并在滑动槽上滑动,从而通过外环架带动滑动轮夹持树干的外表面,同时蜗轮蜗杆减速器自锁防止滑动轮滑动,两者共同作用使得环抱式椰果切割采摘机可以锁紧固定在树干上;当切割机械手通过滑动电机驱动可沿环形滑轨滑动至环形的任意位置进行采摘,切割机械手设有第一摆动电机、第二摆动电机和转向电机,当第一摆动电机驱动时,使得摆动臂以摆动杆与滑动基座为轴转动;当第二摆动电机相反方向转动时,第二摆动电机的输出端通过带动旋转杆从而带动切割手机械以第一小臂、第二小臂与摆动杆连接处为轴转动,切割机械手可进行多轴变动,采摘任意角度的椰子,通过切割电机驱动圆锯片对果柄进行切割,这样,可快速切断椰子与果树连接的果柄;另外,伸缩气缸直接连接在内环架和外环架上,这样设置减少了内环部及外环部的重量,从而使得环抱式椰果切割采摘机更加便于携带、使用;此外,本发明还设有控制系统,能够对树木种类及实际尺寸进行攀爬的预判断,通过反馈的信息与接收到的操作指令以实时调整攀爬方向和速度,及采摘情况等,而且能够实现远程操作,实现攀爬和采摘智能化,能够高效进行果实采摘。
本发明的摘果方法包括以下步骤:
(1)将内环部的内环架拆卸,拔出用于连接第一固定孔位和第二固定孔位的连接销,拆卸连接内环架之间的连接件,将内环架夹持在待摘果的树干外,通过连接件将内环架连接,用连接销穿过第一固定孔位和第二固定孔位,完成内环部安装在树干外,且两个以上小滑轨在伸缩气缸的带动下组成环形滑轨;
(2)驱动爬行电机带动滑动轮转动;
(3)驱动设置在内环部和外环部上的伸缩气缸,根据树干外径进行调整滑动轮的位置
(4)当采摘机移动至适当位置,爬行电机停止驱动,驱动伸缩气缸调节行程锁紧;
(5)滑动电机驱动切割机械手沿环形滑轨滑动至合适位置;
(6)通过驱动第一摆动电机、第二摆动电机、转向电机来调节切割机械手;
(7)驱动切割机械手上的圆锯片对果实进行切割采摘。
所述步骤(3)中具体包括:通过压力传感器实时检测伸缩气缸的压力值大小来调节伸出或缩回伸缩气缸的活塞杆的行程,实现根据树干的外径大小进行调节各个滑动轮形成的内环形的内径大小。
步骤(5)具体包括:滑动电机带动驱动轮转动并在螺纹万向球的导向下沿着环形滑轨移动到合适位置。
以上方法,在摘果过程中在将内环部环抱在树干上时,通过连接件固定内环架之间的固定,从而使得内环部进行固定且同时使得两个以上小滑轨组成环形滑轨,然后驱动爬行电机转动使得摘果机爬行到合适的位置,在爬行过程中根据不同的树干直径调整滑动轮的内径从而方便移动,然后到达预设位置时摆动臂移动到合适位置进行摘果操作,操作简单,且只需要调整摆动臂的位置即可实现广角度范围的摘果。
- 一种基于自走式摘果机的集成摘果送果机装置
- 一种旋扭式摘果机及其摘果方法