一种基于超声成像的静脉穿刺机器人扎针速度控制方法
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及静脉穿刺机器人领域,尤其是涉及一种基于超声成像的静脉穿刺机器人扎针速度控制方法。
背景技术
医护人员手动静脉穿刺准确率低且易产生医患交叉感染,自动静脉穿刺机器人因本身自动化程度高、穿刺准确的优点,是智慧医疗的一个新兴方向。超声成像设备获取患者进行穿刺处人体组织的纵向截面信息,使静脉穿刺过程中针头扎入体内后,能够准确找准静脉血管的位置。但是,现有的静脉穿刺机器人通常是采用常规的匀速扎针控制,当扎针速度较慢时候,针的刺激引起肌肉收缩,增大摩擦阻力,阻滞针头的插入,延长了穿刺的时间,并导致患者的痛觉被长时间累计并反馈值神经中枢,增强了患者的痛觉感受;当扎挣的速度较快时候,穿刺的控制难以把握,可能导致针头扎入体内的深度发生不精确,从而导致未扎入静脉血管或穿透静脉血管的后壁,造成额外的伤害风险。因此,现有的扎针速度控制方法难以兼顾患者体验和扎针的安全稳定性。
发明内容
本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于超声成像的静脉穿刺机器人扎针速度控制方法。
本发明的目的可以通过以下技术方案来实现:
一种基于超声成像的静脉穿刺机器人扎针速度控制方法,包括:
扎针控制步骤:
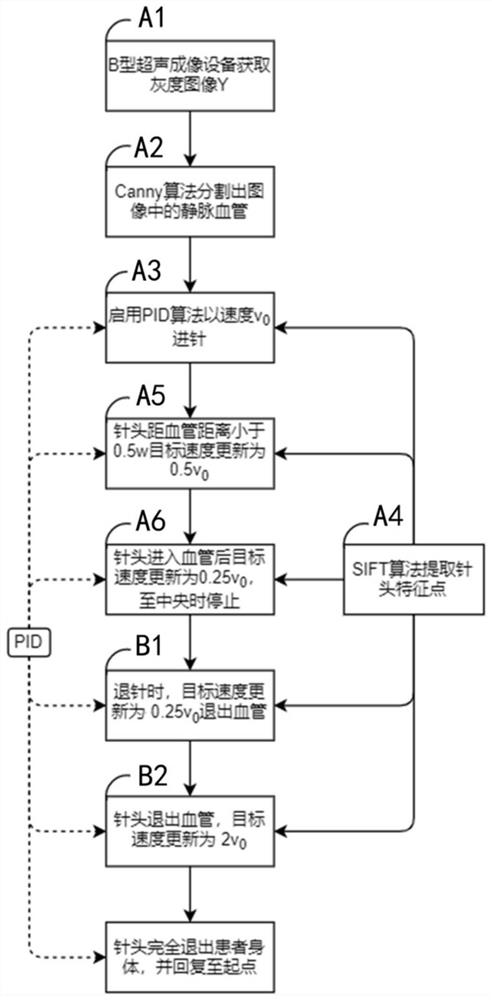
A1、通过超声成像设备获取穿刺部位的二维切面图像;
A2、利用Canny算法分割出二维切面图像中包含的静脉血管,并计算出目标静脉血管的宽度w、静脉血管前壁距离皮肤表面的距离d
A3、将针头以设定的进针初始速度v
A4、利用SIFT算法提取二维切面图像中针头的特征点,并在后续每一帧跟踪针头的位置信息;
A5、保持初始速度v
A6、当针头插入血管后,将针头移动速度设定为0.25v
退针控制步骤:
B1、穿刺作业完成后,将退针初始速度设置为0.25v
B2、针头退出血管后,将针头移动速度设置为2v
进一步地,所述超声成像设备采用B型超声成像设备;所述二维切面图像为人体组织纵向截面的256级灰度图像,图片流的帧率为256帧。
进一步地所述的步骤A2中,Canny算法勾勒出了静脉血管的轮廓,在准备穿刺部位的静脉血管的轮廓上的随机选取n对采样点(x
进一步地所述的进针初始速度v
进一步地所述步骤A3~A6,B1和B2均采用PID算法进行闭环控制。
进一步地所述闭环控制的表达式为:
其中,u(k)为控制器输出,K
进一步地所述u(k)的物理含义即为第k时刻控制器输出的PWM波的频率f,其计算表达式为:
其中,v
进一步地所述的步骤A4中,在针头扎入穿刺部位后,在二维切面图像新增一个特征点,该特征点即为针头,静脉血管的宽度w计算针头距离皮肤表面的距离d
d
d
本发明将B型超声成像获取的二维切面图像进行图像处理,使用Canny图像分割算法获取静脉血管的位置和宽度信息,使用SIFT算法获取并跟踪针头这一特征点的位置,使用PID控制算法控制静脉穿刺时进针至退针全过程的速度,实现静脉穿刺机器人扎针速度的精确控制,减轻患者静脉穿刺时的痛苦,最大程度上避免医疗事故的发生,保障静脉穿刺的治疗效果。
与现有技术相比,本发明具有以下有益效果:
1、本发明使用对静脉穿刺过程中的扎针速度进行细致的分段控制,充分考虑患者的痛觉和穿刺任务的安全性,有效地降低了患者进行穿刺治疗时的痛觉,降低了发生医疗事故的风险。
2、本发明使用PID算法对执行扎针动作电机的速度进行控制,使其稳态误差趋近于零,能使实际扎针速度较好地跟随目标扎针速度。
3、本发明运用B型超声成像设备(B超)获取患者静脉穿刺部位的纵向截面信息,使静脉穿刺过程中能够获得针头的深度位置信息,实现对扎针速度的精确控制。
附图说明
图1为本发明的控制方法流程示意图。
图2为Canny算法图像分割示例原图。
图3为Canny算法图像分割结果图。
图4为本发明中提及的针头特征点提取示意图。
图5为本发明中提及的针头在血管外位置示意图。
图6为本发明中提及的针头在血管内位置示意图。
图7为本发明的控制过程的扎针速度变化折线图。
具体实施方式
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
如图1所示,本实施例提供了一种基于超声成像的静脉穿刺机器人扎针速度控制方法,包括以下步骤:
扎针控制步骤:
步骤A1、通过使用B型超声成像设备将患者待穿刺部位的纵向截面信息反映在生成的灰度图像Y中。
步骤A2、利用Canny算法处理步骤S1中得到的灰度图像Y,分割出图像信息中的静脉血管部分,并计算出目标静脉血管的宽度w、静脉血管前壁距离皮肤表面的距离d
步骤A3、利用PID算法控制扎针的速度,并以初始目标速度v
步骤A4、利用SIFT算法提取针头在灰度图像Y中的特征点,并在后续每一帧中都跟踪该特征点的位置信息。
步骤A5、保持初始速度v
步骤A6、当针头插入静脉血管后将目标扎针速度设定为0.25v
退针控制步骤:
步骤B1、穿刺作业完毕后,将目标扎针速度设定为0.25v
步骤B2、针头退出血管后,将目标扎针速度设定为2v
一、扎针控制步骤具体展开如下:
在步骤A1中,B型超声成像设备获取患者待静脉穿刺部位的二维切面图像,该图像包含了该部位的纵向截面信息,该设备生成的灰度图像Y以每秒256帧的帧率传送至上位机,供上位机进行图像处理。B型超声(Brightness-mode Ultrasound),简称B超,是一种使用超声探头向物体发射超声波,记录物体内部结构的回波,将回波进行处理而形成灰度图像,以反映物体的内部结构的技术。B型超声成像将回波信号显示为光点,回波的强弱以像素的灰度值显示。声阻抗相差越大,回波反射越强,产生的回波信号越亮;反之回波反射越弱,产生的回波信号越暗。静脉穿刺机器人所使用的B型超声成像设备使用阵列探头产生一行行灰度像素,组成一个平面,即显示一个断面的图像,称为二维切面图像。该二维切面图像显示的即为人体组织的纵向截面信息,利用该二维切面图像可以获得人体组织内静脉血管的位置、宽度等信息,也可以获得针头的位置信息。
在步骤A2中,利用Canny算法处理在步骤S1中得到的灰度图像Y。在对患者静脉穿刺部位获取的纵向截面的二值化图像L中,像素值为1的白色像素代表静脉血管壁的轮廓,而像素值为0的黑色像素代表静脉血管内部及其周围的其他人体组织。由此,Canny算法勾勒出了静脉血管的轮廓。静脉血管图像分割的测试实例如图2所示,该图为原始灰度图像Y的示例图片,如图3所示,该图为对其处理后得到二值化图像L。
将该二值化图像L与灰度图像Y进行叠加,从而获得静脉血管在原始灰度图像Y中的位置信息及静脉血管的宽度。在准备穿刺部位的静脉血管的轮廓上的随机选取5对前后壁对应的采样点(x
再根据上述相同的采样点计算距离方法,计算出静脉血管前壁距离皮肤表面的距离d
d
在步骤A3中,利用PID算法对静脉穿刺机器人扎针环节的局部系统进行闭环控制,并设定扎针期望的进针初始速度为v
静脉穿刺机器人中执行扎针动作的电机无法完全实时跟踪期望的速度,因此会存在误差e
e
其中,v
PID算法将使用由上式求得的误差进行闭环反馈控制。现针对第k时刻的控制器输出u(k)进行PID算法的离散化表示,机器人系统的采样时间为Δt,计算表达式为:
其中,K
PWM波频率f折算至电机执行时的实际扎针速度可经以下表达式实现:
静脉注射机器人扎针过程中进针及退针的全过程都受以上所述PID算法的控制。
在步骤A4中,如图4所示,利用SIFT算法识别灰度图像Y中表示针头的特征点。在后续的每一帧图像中,跟踪该特征点并不断更新针头的位置信息。
经SIFT算法得到针头的特征点位置后,可以经计算得到针头距离皮肤表面的距离d
d
d
在步骤A5中,当针头距离静脉血管前壁的垂直距离大于等于该血管宽度w的0.5倍时,保持目标扎针速度v
当针头距离静脉血管前壁的垂直距离小于该血管宽度w的0.5倍时,改变目标扎针速度v
如图5所示,图中展示了针头特征点位置与目标静脉血管位置的相对位置关系。
在步骤S6中,如图6所示,针头在血管内的可操作空间有限,为避免误差导致针头刺破血管后壁,需要进一步减缓进针速度,将目标扎针速度v
当针头到达血管中央位置时,将目标扎针速度v
结合以上进针步骤可得到扎针控制步骤的速度函数表达式为:
二、退针控制步骤具体展开如下:
在步骤B1中,在穿刺医疗任务完成之后,考虑到静脉血管的应激性,避免产生穿刺后的不良反应,应以较慢的速度将针头退出静脉血管,将目标扎针速度v
在步骤B2中,在针头已经退出静脉血管后,可以较快速度退出人体组织,将目标扎针速度v
待针头完全退出人体组织并回复至起始位置时,结束本次扎针速度控制。
结合以上退针控制步骤的速度函数表达式为:
如图7所示,图中展示出扎针速度控制全过程中目标扎针速度变化的情况。图中横坐标表示静脉穿刺过程的时间t,单位为毫秒;图中纵坐标表示静脉穿刺过程中各时间段针头移动速度与针头在血管内的速度之间的比值。该图展示了静脉穿刺过程中针头速度随时间变化的比例关系。
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
- 一种基于超声成像的静脉穿刺机器人扎针速度控制方法
- 一种全自动静脉穿刺识别一体机器人的控制方法