TMR磁场传感器
文献发布时间:2023-06-19 10:24:22
技术领域
本发明属于传感器测量技术领域,尤指涉及一种TMR磁场传感器。
背景技术
TMR元件是一种新型磁电阻效应传感元件,因其相较于AMR元件和GMR元件具有更大的电阻变化率、更好的温度特性和线性度等优点,在工业环境中已得到广泛应用。TMR磁场传感器具有一定的可测量磁场范围,在其可测量范围内TMR磁场传感器的输出是线性的,而一旦超出其可测量范围时TMR磁场传感器的输出趋于饱和。TMR磁场传感器的可测量磁场范围主要受感测层配方、厚度、形状等因素的影响。但通过改变感测层配方、厚度或形状来扩大可测量磁场范围效果不太显著,而且需要投入较大的成本。因此,提高TMR磁场传感器的可测量磁场范围期望可以在保持原TMR磁传感器结构设计的基础上进行。
目前有人提出了通过通量集中器来扩展TMR磁场传感器的磁场测量范围,该方法使用软磁材料在TMR磁场传感器中构造通量集中器,外磁场在经过通量集中器时会产生扭曲的磁场分量,通过改变通量集中器的几何形状来改变外磁场的扭曲情况。TMR感测层通过测量易轴上通量集中器扭曲的外磁场分量,来达到增加磁场测量范围的目的。但该方法由于加入了软磁材料,不仅会导致TMR磁场传感器的磁滞增加,而且也增加了TMR磁场传感器的制备工艺难度和提高了成本。
还有人提出了通过自测电流线来扩展TMR磁场传感器的磁场测量范围,该方法在TMR磁场传感器中加入一根或多根自测电流线,当外磁场的幅值达到TMR磁场传感器的测量阈值时,给自测电流线通过电流以产生和外磁场方向相反的磁场,以此保证净磁场在TMR磁场传感器的测量范围内。自测电流线所产生的磁场方向和大小可通过改变自测电流线的连接方式以及自测电流线中的电流大小来控制。但该方法由于加入了自测电流,会增加TMR磁场传感器的功耗,同样也增加了磁场传感器的制造工艺难度以及提高了成本。
发明内容
本发明的目的在于提供一种低成本的可增加磁场测量范围的TMR磁场传感器。
为了实现上述目的,本发明采取如下的技术解决方案:
TMR磁场传感器,包括:基片以及设置于所述基片上的一个或多个TMR磁传感器芯片,所述TMR磁传感器芯片相对于所述基片表面倾斜设置,所述TMR磁传感器芯片的易轴方向与待测的外磁场方向存在夹角。
作为本发明TMR磁场传感器的一种具体实施方式,所述基片上设置有从其表面向内凹陷的凹槽,所述凹槽具有用于固定所述TMR磁传感器芯片的斜面,所述凹槽内填充覆盖所述TMR磁传感器芯片的塑封层。
作为本发明TMR磁场传感器的一种具体实施方式,所述凹槽的竖截面形状为等腰三角形或等腰梯形。
作为本发明TMR磁场传感器的一种具体实施方式,所述基片上设置有第一TMR磁传感器芯片和第二TMR磁传感器芯片,所述第一TMR磁传感器芯片的易轴正方向和所述第二TMR磁传感器芯片的易轴正方向相反,所述第一TMR磁传感器芯片和第二TMR磁传感器芯片连接成全桥电路结构。
作为本发明TMR磁场传感器的一种具体实施方式,所述基片底面设置有重布线层,所述重布线层通过从所述基片底面贯穿至所述TMR磁传感器芯片的芯片焊盘的金属插塞与所述TMR磁传感器芯片相连,所述重布线层的底面设置有用于TMR磁场传感器的供电及信号输出的传感器外接焊盘。
作为本发明TMR磁场传感器的一种具体实施方式,所述基片上设置有从其表面向内凹陷的第一凹槽和第二凹槽,所述第一凹槽具有用于固定所述第一TMR磁传感器芯片的第一斜面,所述第二凹槽具有用于固定所述第二TMR磁传感器芯片的第四斜面。
作为本发明TMR磁场传感器的一种具体实施方式,所述第一斜面相对于基片表面的倾斜角度和所述第四斜面相对于基片表面的倾斜角度相同,或者所述第一斜面相对于基片表面的倾斜角度和所述第四斜面相对于基片表面的倾斜角度相差90°。
作为本发明TMR磁场传感器的一种具体实施方式,还包括覆盖所述基片表面的金属层。
作为本发明TMR磁场传感器的一种具体实施方式,所述基片上设置多个TMR磁传感器芯片时,所有TMR磁传感器芯片设置于同一高度。
作为本发明TMR磁场传感器的一种具体实施方式,TMR磁传感器芯片工作时,感测外磁场在所述TMR磁传感器芯片的易轴方向上的磁场分量。
由以上技术方案可知,本发明将TMR磁传感器芯片倾斜设置于极片上,使其能与待测外磁场形成夹角,实现将外磁场的分量集中在TMR磁传感器芯片的易轴和Z轴上,TMR磁传感器芯片感测的是外磁场的分量,因此相比于水平放置的TMR磁传感器具有更大的动态测量范围,而且通过使外磁场分量集中在TMR磁传感器芯片的易轴和Z轴上,TMR磁传感器芯片主要感测易轴上的分量来进行测量,相比于把外磁场分量集中在易轴和难轴的TMR磁场传感器具有更好的线性度。在更具体的技术方案中,采用重布线技术实现隧道结磁电阻的推挽全桥连接,可以进一步提高传感器的灵敏度。
附图说明
为了更清楚地说明本发明实施例,下面将对实施例或现有技术描述中所需要使用的附图做简单介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例的结构示意图;
图2至图8分别为本发明实施例1制备过程中各步骤的示意图;
图9为本发明外磁场在第一TMR磁传感器芯片的磁场分量示意图;
图10为本发明实施例2的结构示意图。
具体实施方式
为了让本发明的上述和其它目的、特征及优点能更明显,下文特举本发明实施例,并配合所附图示,做详细说明如下。
实施例1
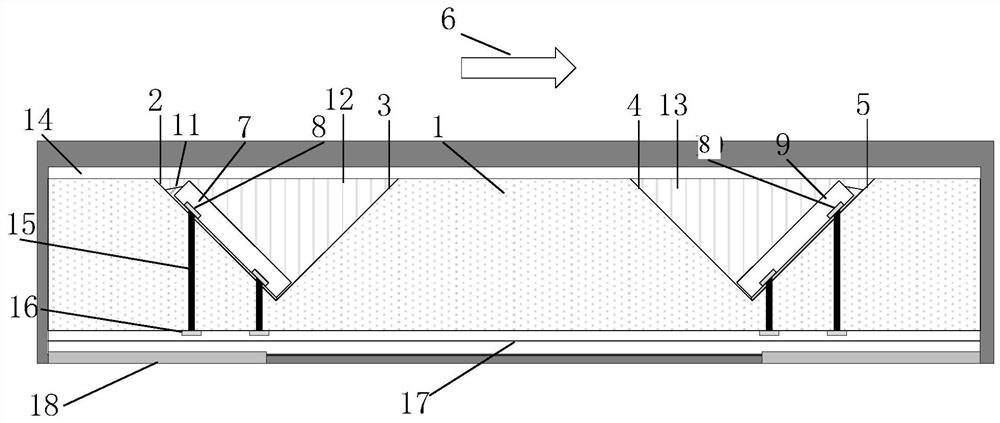
如图1所示,本实施例的TMR磁场传感器包括基片1,在基片1上设置有第一TMR磁传感器芯片7和第二磁传感器芯片9,第一、第二磁传感器芯片均相对于基片1表面(外磁场方向)倾斜设置。本实施例在基片1上设置两个凹槽:第一凹槽(未标号)和第二凹槽(未标号),凹槽用于安装TMR磁传感器芯片。本实施例的两个凹槽的竖截面形状均为等腰三角形,即每个凹槽具有相对设置的两个斜面,这两个斜面轴对称。两个凹槽共4个斜面:第一斜面2、第二斜面3、第三斜面4和第四斜面5,第一斜面2和第二斜面3相对设置,位于第一凹槽中,第三斜面4和第四斜面5相对设置,位于第二凹槽中。第一TMR磁传感器芯片7设置于第一斜面2上,第二TMR磁传感器芯片9设置于第四斜面5上,两个TMR磁传感器芯片的设置高度相同。通过将TMR磁传感器芯片相对基片倾斜设置,使TMR磁传感器芯片的易轴方向和外磁场方向(图1中箭头6所示的方向)存在夹角,从而外磁场会在TMR磁传感器芯片7的易轴方向上存在磁场分量,TMR磁传感器芯片通过感测易轴上的外磁场上的分量,输出与外磁场相关的电压信息。
为了提高传感器的灵敏度,本实施例的第一TMR磁传感器芯片7和第二磁传感器芯片9连接成推挽全桥电路结构,第一TMR磁传感器芯片7的阻值和第二TMR磁传感器芯片9的阻值随外磁场有相反的变化趋势。为了便于形成全桥电路,本实施例将两个TMR磁传感器芯片设置于不同的凹槽中,但在其他的实施例中,也可以将两个TMR磁传感器芯片设置于同一个凹槽的相对的斜面上。此外,除了可以采用向基片1内部倾斜的凹槽斜面来安装TMR磁传感器芯片外,也可以采用向基片外突出的斜面来安装TMR磁传感器芯片,只要使TMR磁传感器芯片的易轴方向与外部待测磁场方向倾斜,形成夹角即可。采用凹槽的安装结构,可以使基片表面结构平整,便于封装。本发明通过改变TMR磁传感器芯片的安装方向,使TMR磁传感器芯片工作时,外磁场分量集中在TMR传感单元的易轴以及和易轴、难轴相垂直的Z轴上,即Z轴垂直于易轴和难轴所在平面。基片上设置的TMR磁传感器芯片可以是一个或多个,当有多个TMR磁传感器芯片时,这些磁传感器芯片可以连接成全桥电路结构或半桥电路结构。TMR磁传感器芯片可以设置在同一个斜面上,也可以设置在不同的斜面上,当都设置于同一个斜面上时,磁传感器芯片位于同一高度上。
第一凹槽和第二凹槽内分别填充有覆盖第一TMR磁传感器芯片7及第二TMR磁传感器芯片9的第一塑封层12和第二塑封层13。塑封层可使用硅胶、氧化硅、氮化硅等材质制成,塑封层起到填充固定的作用。优选的,在基片1的表面上覆盖有一金属层14,金属层14可由无磁性的金属或合金制成,如金、钛等,金属层14起到结构加固和散热的作用。在基片1的底面设置有重布线层17,重布线层17通过金属插塞15与TMR磁传感器芯片实现电连接。在重布线层17的底面设置有传感器外接焊盘18,本实施例中,共设置了8个传感器外接焊盘18。传感器外接焊盘18的数量可根据需求进行设置。
下面结合图2至图8,对本实施例的TMR磁场传感器的制备过程作进一步的说明:
如图2所示,首先,提供一基片1,使用切割、刻蚀等工艺在基片1的表面上加工出第一凹槽和第二凹槽,从而形成安装TMR磁传感器芯片的斜面,本实施例的第一斜面2和第二斜面3之间的夹角为90°,第三斜面4和第四斜面5之间的夹角为90°;斜面的倾斜角度,即斜面与基片表面(水平面)之间的夹角没有限制,两个相交斜面间的夹角也可以为其它角度;
如图3所示,将第一TMR磁传感器芯片7和第二TMR磁传感器芯片9分别设置于第一斜面2和第四斜面5上,TMR磁传感器芯片采用磁控溅射、退火等工艺制备,每个磁传感器芯片上都具有芯片焊盘8(图4);本实施例采用DAF膜胶11将第一TMR磁传感器芯片7和第二TMR磁传感器芯片9分别固定第一斜面2和第四斜面5上,两个TMR磁传感器芯片的设置高度相同;使第一TMR磁传感器芯片7的易轴正方向沿第一斜面2向上或向下(图9),第二TMR磁传感器芯片9的易轴正方向和第一TMR磁传感器芯片7的易轴正方向相反,如第一TMR磁传感器芯片7的易轴正方向沿第一斜面2向下,则第二TMR磁传感器芯片9的易轴正方向沿第四斜面5向上,从而当施加如图3中箭头6所示方向的外磁场时,第一TMR磁传感器芯片7和第二TMR磁传感器芯片9中的TMR磁电阻元件阻值随着外磁场变化的趋势相反;
如图5所示,在第一凹槽和第二凹槽内填胶,形成第一塑封层12及第二塑封层13,然后在基片1的表面采用沉积、电镀等工艺形成覆盖极片1表面的金属层14;
如图6所示,在基片1的底面上加工贯穿至TMR磁传感器芯片的芯片焊盘8的通孔,可采用干法刻蚀、激光钻孔等工艺来制备通孔,在通孔内采用物理气相淀积(PVD)、电镀或化学镀等方法形成金属插塞15,金属插塞15用于实现TMR磁传感芯片与重布线层的电连接,金属插塞15的一端与TMR磁传感芯片的芯片焊盘8相连,另一端形成与重布线层相连的插塞焊盘16;
如图7所示,采用重布线技术在基片1的底面形成重布线层17,重布线层17对插塞焊盘16进行重新布线并形成外接焊盘18,第一TMR磁传感器芯片7和第二TMR磁传感器芯片9中的TMR磁电阻单元通过芯片焊盘8、金属插塞15、插塞焊盘16和重布线层17实现推挽全桥连接的电路结构;
对基片1进行切割、注塑封装形成TMR磁场传感器,本实施例的磁场传感器共有8个外接焊盘(图8):18-1、18-2、18-3、18-4、18-5、18-6、18-7、18-8,其中,18-1、18-2、18-5、18-6为空脚,18-3、18-5、18-7、18-8分别用于TMR磁场传感器的供电以及信号输出。
本实施例的工作原理如下:
由于TMR磁传感器芯片为倾斜设置,其易轴方向与待测外磁场方向间存在夹角,以第一TMR磁传感器芯片为例,如图9所示,外磁场6会在第一TMR磁传感器芯片7的易轴方向(图9中的方向29)上存在一个磁场分量28,并在Z轴方向(图9中的方向26)上存在另一个磁场分量27,第一TMR磁传感器芯片(第二磁传感器芯片9同理)通过感测其易轴方向上的外磁场的分量,输出与外磁场相关的电压信息,达到扩展测量磁场范围的目的。本发明的TMR磁传感器芯片在测量时外磁场在难轴上没有磁场分量,磁场变化始终只在易轴和Z轴平面上变化,由于Z轴上的磁场分量不会影响磁传感器芯片的线性度,从而避免了传统TMR磁场传感器芯片难轴上的磁场分量会导致磁传感器芯片输出的线性度变差的情况,因此具有较小的磁滞和线性度。而且通过将第一TMR磁传感器芯片7和第二磁传感器芯片9连接成推挽全桥电路结构,相对与半桥结构,灵敏度更高。
实施例2
如图10所示,本实施例和实施例1不同的地方在于:第二TMR磁传感芯片9安装在基片1的第三斜面4上,将第一TMR磁传感器芯片7和第二TMR次长安新片9相互倒着安装,使第一TMR磁传感器芯片7的易轴正方向和第二TMR磁传感芯片9的易轴正方向相反,一个易轴正方向沿着斜面向上,另一个易轴正方向沿着斜面向下,第一TMR磁传感器芯片7和第二TMR磁传感器芯片9中的TMR磁电阻元件阻值随着外磁场变化的趋势相反,第一TMR磁传感器芯片7和第二TMR磁传感器芯片9中的TMR磁电阻单元通过芯片焊盘、金属插塞、插塞焊盘和重布线层实现推挽全桥连接的电路结构。实施例1和实施例2的制备流程和工作原理相同,此处不做赘述。
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽范围。
- 一种TMR磁场传感器
- 双自由层TMR磁场传感器