一种用于自动监测河底淤泥的淤积状态的方法
文献发布时间:2023-06-19 10:24:22
技术领域
本发明涉及河道治理领域,尤其涉及一种用于自动监测河底淤泥的淤积状态的方法。
背景技术
航标是指指示航道方向、界限与碍航物的标志,是帮助引导船舶航行、定位和标示碍航物与表示警告的人工标志,为各种水上活动提供安全信息的设施或系统,用于标示航道、锚地、滩险及其他碍航物的位置,表示水深、风情,指挥狭窄水道的交通。
对于设置在内河中的浮标,其用于指示航道以及河道中的险滩或者障碍物。而不管是天然的河道还是人工挖凿的运河,都在作为市政、乡村的排放通道。其中,市政排水管道作为收集和输送城市污水、雨水的重要基础设施,是城市重要的排放系统,是保障城市安全健康运行的基础。而当前我国乡村以及城市地表卫生状况较差,暴雨或者日常市政维护时,地表的垃圾或者废弃物会随着地表径流冲刷进入到河流中,而这些垃圾或废弃物会在河流的河道中形成淤泥,淤积在河流的河底,这严重影响了河流的通航,这些淤泥还会对河流的水质造成不健康的影响,因而,监控河底淤泥的状况成为目前河道治理中的一项非常重要的工作。
目前对于淤泥淤积厚度的监测,通常采用人工使用机械测量杆,来测量河底淤泥的厚度。这样的测量方式,需要耗费很大的人力、物理,同时也不能够对淤泥的淤积状况进行实时地、自动地监控,并且在人工操作的过程中,还容易出现人员人身伤害、溺水等事故。同时,由于中国的广大河流是位于亚热带或者温带气候区域,通常在夏季的降雨量要大于冬季的降雨量,这就造成夏季的地表径流要大于冬季的地表径流,由此带来的结果是在夏季时河流的流量大、水位深同时携带的淤泥量较大但是同时大的流量也会对河底淤泥的冲刷效果较强;而在冬季河流的流量小、水深浅同时携带的淤泥量较小且较小的流量对河底淤泥的冲刷效果较弱,同时,在同一段河道或者航道,由于沿途加入的地面径流情况不同,河道或者航道不同的位置处的淤泥淤积情况也不同,也就是说,河底淤积的淤泥受到很多的因素的影响,实时地关注淤泥的状况对于河流的治理具有很大的有益效果。因而,对于淤泥的淤积状况的监测,迫切需要一种能够实时、自动且高效的监测方式。
发明内容
为解决上述技术问题,本发明提出一种用于自动监测河底淤泥的淤积状态的方法,该方法通过设置在河流中的至少一个浮标来实施,其中每个浮标包括浮标主体、锚和锚系装置,锚通过其锚爪穿过淤泥层插入到河底的坚实层,锚系装置的一端连接到锚,而另一端连接浮标主体,由此将浮标主体通过锚、锚系装置固定在河流的特定位置处;所述锚系装置包括锚绳和连接杆,锚绳的一端与锚连接,锚绳的另一端与连接杆的一端连接,连接杆的另一端与浮标主体连接,其中锚绳采用纤维材料制成,连接杆为刚性结构;在所述浮标主体中还设置有锚绳角度测量装置,该锚绳角度测量装置包括测量轴和枢转体,所述锚绳角度测量装置用于测量枢转体与测量轴在周向方向上的相对转动角度,其中测量轴与固定于浮标主体的基座固定地连接,枢转体与连接杆固定地连接; 在浮标主体的底部设置有超声波测距仪,相对于浮标主体底部以一定倾斜角度朝向河底发射超声波,用于测量浮标主体距离河底的深度;所述基座上还设置有陀螺仪,用以测量所述基座的倾斜角度;所述浮标还包括控制器,所述控制器包括处理模块和存储模块,所述超声波测距仪、锚绳角度测量装置、陀螺仪能够将数据发送至处理模块,所述存储模块储存有多条历史记录;
所述方法包括以下步骤:
步骤1、控制器向超声波测距仪发出指令,或者控制器接收上位机的指令然后向超声波测距仪发出指令,来调整超声波测距仪的发射角度,控制超声波测距仪发出超声波,控制器获取超声波测距仪的输出数据;
步骤2、控制器获取此时锚绳角度测量装置的输出数据;
步骤3、控制器获取陀螺仪的输出数据;
步骤4、控制器计算本次测量所对准位置处的淤泥深度;
步骤5、控制器将本次测量的测量时间、所获取的超声波测距仪的角度以及距离数据、锚绳角度测量装置的输出数据、锚绳与水平面的角度、陀螺仪的输出数据、计算得到的淤泥深度作为一条历史记录储存在存储模块中。
进一步地,如果是该浮标的首次测量,那么在所述步骤1之前,对该浮标的控制器、超声波测距仪、锚绳角度测量装置、陀螺仪进行初始化。
进一步地,所述步骤1中,所述调整超声波测距仪的发射角度是由控制器向与超声波测距仪传动连接的步进电机发送PWM信号来完成的。
进一步地,其中,步进电机通过齿轮或滚珠丝杠与超声波测距仪传动地连接,用以驱动超声波测距仪转动。
进一步地,所述步骤4中,淤泥深度d的计算公式为
d= D-H= L*sin(90°-x-m)- h*sin(90°-m-n);
其中,D为水面距离河床的坚实层的垂直高度,H为水面距离淤泥的垂直高度,L为锚绳的长度,x为锚绳角度测量装置测得的角度数据,m为陀螺仪测得的角度数据,h为超声波测距仪测得的浮标到测量目标的距离,n为超声波测距仪的发射角度。
进一步地,所述浮标还包括通讯装置,控制器连接至该通讯装置,控制器能够通过GSM网络与上位机进行双向通信,所述方法还包括:步骤6、控制器将储存在存储模块中的历史数据以及本浮标的识别信息发送至上位机。
进一步地,所述方法还包括:步骤7、所述上位机对获得的历史数据进行分析,以锚绳与水平面的角度为基准,对所述的历史记录进行分组,锚绳与水平面的角度相同的历史记录分入同一组中,以测量时间的顺序对每组的历史记录进行排序。
进一步地,所述步骤7中还包括,对应于锚绳与水平面的角度的每组历史记录,设置一个对应地阈值,基于排序后的每组历史记录,当出现淤泥深度超过阈值时,上位机发出警告信息。
进一步地,所述警告信息包括浮标的位置、锚绳与水平面的角度、测量时间、淤泥深度以及清淤提醒。
实施本发明,具有如下有益效果:通过使用本发明的方法,使得能够在河流中既有的浮标能够对其所在位置处的河底淤泥的淤积情况进行实时地测量,并形成历史数据,通过对获得的数据进行分析,能够实时地获取该所在位置处的河底淤泥的淤积情况,准确、及时地了解淤积的变化,既能够应对日常的测量任务,同时也能够对于突发出现的大量淤积物堆积的情况及时地给出警告,能够大大地减少传统方式中测量河道淤泥深度付出的大量人力以及物力,大大地便利了河道的管理和清淤工作,提高了及时性和效率。
附图说明
为了更清楚地说明本发明的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它附图。
图1是本发明的浮标的工作示意图。
图2是本发明的浮标的锚绳角度测量装置的结构示意图。
图3是本发明的在河流中不同淤积状况的位置布置的多个浮标的示意图。
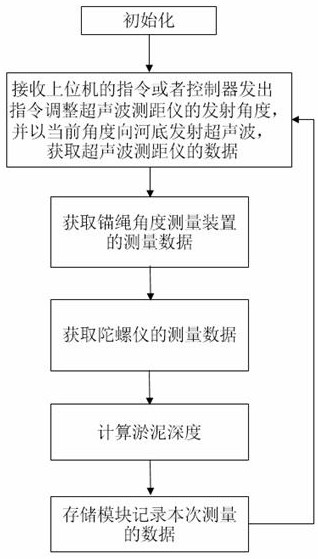
图4是本发明的方法的流程图。
其中附图标记:1.浮标主体;2.锚绳;3.锚;4.基座;5. 锚绳角度测量装置;6.超声波测距仪;7.测量杆;8.陀螺仪;9.警告灯;51.枢转体;52.测量轴。
具体实施方式
下面将结合本发明实施例中的附图,对发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
对于提出的问题,特别是对于黄河或者京杭运河这种接收大量的泥沙的河流,而河流本身的流量较小或者流速较慢,这更加加重了河底淤泥的淤积状况,例如黄河下游的河段其河床的高度逐年上涨,京杭大运河中有些河段淤积严重,这不仅影响了通航,而且由于淤泥都是从河流流域中带入的各种地表杂质或者污染物,这些淤泥堆积在河底,会严重地影响河流的水质,进而影响了下游的农业安全和环境安全。目前对于黄河的清淤,通常情况下是采用小浪底水库集中泄洪,利用突然增大的流量来增加水流携带泥沙的能力,将河床上的部分淤泥或泥沙带走,进而降低或减轻河底的淤积情况;而对于像京杭大运河这类的人工河流或者小型的自然河流,通常采用的是人工清淤的方式,也即使用清淤船清理河底的淤泥。这些都需要对江河河底的淤泥情况进行探测。
为了解决前面提出的问题,本发明提出了一种能够用于监测河流河底淤泥的淤积状态的浮标,该浮标可以设置在天然的江河或者人工运河中,用于指示浅滩、水下障碍物或者用于指示航道,而这也是在河流中经常能够看到的指示装置,特别是在有航运功能的江河或运河中,比如:长江、黄河或者京杭运河中。
如图1所示,所述浮标包括浮标主体1、锚3和锚系装置。其中,浮标主体1即是普通的常见浮标,一般悬浮在水面上,浮标本身具有一定的颜色或者其他标示信息,用以向过往的船只传递指示信息或警告信息。进一步地,浮标在其顶端可以具有警告灯9。
其中,锚3具有锚杆和锚爪,优选地采用钢材质。由于江河河底的淤泥比较稀软,对于重量较重的锚3,当将锚3放置在江河的河床上时,锚3会下沉,然后穿过河底的较为稀软的淤泥层,锚爪则在浮标的拖拽牵引下插入到位于淤泥层之下的较硬的坚实层中,由此完成了锚固的过程。
如图1所示,锚系装置包括锚绳2和连接杆7,锚绳2的一端连接到锚3上,锚绳2的另一端则连接到连接杆7的一端,而连接杆7的另一端则连接到浮标主体1。通过锚绳2和连接杆7,浮标主体1被锚3锚固在河流的特定位置处。在本发明中,对于锚绳2,优选地采用坚固、强度高且较轻的材质,例如采用锦纶、丙纶或维纶制成,而连接杆7则采用刚性材料制成。那么当浮标主体1在江河中被水流冲向下游时,浮标主体1受到的水平的力经由锚绳2被锚3所抵抗,由于锚绳2的质量较轻,此时锚绳2近乎于绷直的直线状态。而由于我国的河流受季节性降雨的影响很大,当夏季降雨量较大的时候,河流的水深普遍较大;而当冬季降雨量较小时,河流的水深普遍较小。由此就导致浮标在河流的水深不同时,锚绳2尽管都处于近乎绷直的直线状态,如图1所示,但是当水深较大时,锚绳2相对于河床水平面的夹角b较大;而当水深较小时,锚绳2相对于河床水平面的夹角a较小。因而,即便是对于相同的淤泥淤积状态下,河流的水深也是在不断的变化,这对于实现自动地、实时地监控淤泥淤积状况是很困难的。
为此,本发明在浮标主体1上设置了超声波测距仪6,超声波测距仪6的数量优选地选择为一个,该超声波测距仪6设置在浮标主体1的底部。超声波测距仪6具有超声波发射单元和接收单元(图中未示出),超声波发射单元向特定方向发出超声波,超声波在水中传播,当遇到障碍物时,被障碍物反射回来,接收单元接收到反射回来的超声波;通过计算超声波发射出去与接收到的时间差,进而计算得到超声波测距仪6距离该特定方向上的障碍物的距离。
为了能够控制超声波测距仪6对外发射超声波的方向,优选地,在浮标主体1上还设置有稳定机构(图中未示出),超声波测距仪6通过稳定机构固定在浮标主体1上。其中,稳定机构包括电机和减速机构,其中电机优选为步进电机,而减速机构可以选择直齿、蜗轮蜗杆或行星齿轮组,所述超声波测距仪6安装在减速机构的输出端,通过步进电机的正反转,致动所述超声波测距仪6摆动,进而控制和调整超声波测距仪6的发射角度。
所述浮标还包括锚绳角度测量装置,该锚绳角度测量装置设置在浮标主体1中。具体地,如图1-2所示,所述锚绳角度测量装置包括测量轴52和枢转体51,所述测量轴52能够与枢转体51之间发生周向方向上的相对转动,并且能够测得枢转体51相对于测量轴52的相对转动的角度。进一步地,在所述浮标主体1中还设置有基座4,所述测量轴52与所述基座4固定地连接,所述枢转体51与连接杆7抗扭地连接。当水深不同时,浮标主体1的高度发生变化从而导致锚绳2与河床水平面的夹角发生变化时,连接杆7能够带动枢转体51相对于测量轴52发生转动,而测量轴52则能够测量此时枢转体51相对于测量轴52转过的角度。优选地,在安装和释放该浮标时,对该锚绳角度测量装置进行校准和标定,例如进行初始化,将连接杆7垂直向下的时候,枢转体51相对于测量轴52的角度位置初始化为0°。由此,当浮标被安装和释放后,当浮标主体1拉动锚绳2绷直时,假定此时浮标主体1处于竖直的状态,通过几何运算即可获知,此时锚绳角度测量装置测得的角度x与锚绳2与水平面的夹角y之和为90°,即x+y=90°,也即能够通过测量锚绳角度测量装置的测量数值x来获得锚绳2与水平面的夹角y,即y=90°-x。
虽然在江河中,水流的方向比较稳定,但是由于风、河底地势、河堤的形状以及过往船只产生的波浪等因素的影响,水面会有波浪的产生,进而造成浮标主体1的摆动和晃动,这会导致锚绳角度测量装置测得的数据不能够反应此时锚绳2与水平面的夹角。为了解决该问题,进一步地,如图2所示,在基座4中设置有陀螺仪8。可以选用单坐标陀螺仪,也即选择Z坐标陀螺仪;也可以选用三坐标陀螺仪。通过该陀螺仪8测得基座4相对于垂线的夹角m,对锚绳角度测量装置测得的角度x进行修正,得到修正后的角度x’=x+m,由此得到修正后的水平面的夹角:
y’=90°-x’=90°-x-m。
而锚绳2加上连接杆7的长度为L。
进一步地,所述浮标还包括控制器,所述控制器包括处理模块和存储模块,所述超声波测距仪6、锚绳角度测量装置以及陀螺仪8将获得的数据发送至处理模块进行处理和运算,得到相应地的历史记录,并将历史记录储存在存储模块中。对于每一次的测量,形成一条历史记录,该条历史记录包括测量时间、陀螺仪测得的结果m、锚绳角度测量装置测得的结果x、运算得到的锚绳2与水平面的夹角y’、超声波测距仪数据h、水深数据H、淤泥深度d。
其中,以一个简单的情况举例,当浮标主体1处于竖直悬停时,如图1所示,那么此时,
m=0, y’=90°-x,H=h,
而此时水面距离河床的坚实层的高度D=L*sin(y’)=L*sin(90°-x),
而超声波测距仪6测得的水面距离河床的深度为h,那么可以得到此时淤泥的深度为:
d=D-H= L*sin(90°-x)-h。
而对于复杂的情况,当测量时浮标主体1处于摇摆状态时,那么此时
水深H=h*sin(90°-m),
淤泥深度d= D-H= L*sin(90°-x-m)- h*sin(90°-m)。
进一步地,所述控制器还包括修正模块,所述修正模块接收陀螺仪的数据以及锚绳角度测量装置的数据,利用陀螺仪的数据对锚绳角度测量装置测得的数据进行修正,也即上面所述的修正,通过修正得到准确的锚绳2与水平面的夹角y’,并将修正后的锚绳2与水平面的夹角y’的数据发送至处理模块,处理模块针对接收到的数据和修正数据进行处理,得到上述历史记录的信息,并将该条历史记录储存在存储模块中。
进一步地,所述浮标还包括通讯装置,控制器连接至该通讯装置,能够通过GSM网络与上位机进行双向通信,将测量的数据,具体地为存储模块中储存的历史记录发送到上位机中,管理员通过对这些数据进行分析,得到河流中特定位置处的淤积状况。
进一步地,对于上述的稳定机构,其包括步进电机和减速机构,所述步进电机与所述控制器连接,控制器向所述步进电机发送指令,即能够改变所述的超声波测距仪6的发射角度。在此,优选地将减速机构选择为滚珠丝杠与扇形齿的组合结构,由于滚珠丝杠结构在致动行程方面的精准度比较高,因而能够通过控制器向稳定机构的步进电机发送的PWM的信号量,使得步进电机转过相应的角度,从而使得丝杠也一同转过相同的角度,通过滚珠使得滚珠丝杠的外套筒产生精确对应的横向位移,而该横向位移则通过与外套筒啮合或者耦合的扇形齿转化为扇形齿对应角度的转动,进而能够准确的控制超声波测距仪6的摆动角度。
而当超声波测距仪6的发射角度发生改变,而不是以垂直于浮标主体1的底部的方向向河床发射时,所述的修正模块还接收发射角度的改变量n,并基于该发射角度的改变,对超声波测距仪6测得的数据进行修正,从而得到此时
浮标主体1距离河床的深度H=h*sin(90°-m-n),
而淤泥深度d= D-H= L*sin(90°-x-m)- h*sin(90°-m-n)。
而正如上述内容所说的那样,由于水深的不同,导致浮标主体1会在河流方向上往上游或者下游漂移一定的距离,因而对应于不同的水深,测得的水深数据以及计算得到的淤泥深度的位置是不同的。由于锚3的重量较大,即便后期出现锚3位置处的淤泥深度变大,也不会对锚3的固定位置产生影响;同时由于采用了较细且重量较小的锚绳2,因而即便淤泥深度发生变化,也不影响锚绳2在锚3与浮标主体1之间的近乎绷直的直线状态。因此,对于同一位置处不同时间点的淤泥情况,可以通过选定的锚绳2与水平面的夹角来进行对应,也即通过选取一个选定的锚绳2与水平面的夹角,可以得到不同时间点上对应的历史记录,也即能够得到不同时间点上的淤泥深度的变化情况。而改变锚绳2与水平面的夹角的数值,即能够得到对应的不同的位置点处不同时间点的淤泥情况。并且,可以根据上述的方式,绘取不同位置点的淤泥深度的随时间变化的曲线,由此可以简单、直观地得到变化趋势。
具体地,本发明的方法包括以下步骤:
步骤1、控制器向超声波测距仪发出指令,或者控制器接收上位机的指令然后向超声波测距仪发出指令,来调整超声波测距仪的发射角度,控制超声波测距仪发出超声波,控制器获取超声波测距仪的输出数据;
步骤2、控制器获取此时锚绳角度测量装置的输出数据;
步骤3、控制器获取陀螺仪的输出数据;
步骤4、控制器计算本次测量所对准位置处的淤泥深度;
步骤5、控制器将本次测量的测量时间、所获取的超声波测距仪的角度以及距离数据、锚绳角度测量装置的输出数据、锚绳与水平面的角度、陀螺仪的输出数据、计算得到的淤泥深度作为一条历史记录储存在存储模块中。
进一步地,如果是该浮标的首次测量,那么在所述步骤1之前,对该浮标的控制器、超声波测距仪、锚绳角度测量装置、陀螺仪进行初始化。
进一步地,所述步骤1中,所述调整超声波测距仪的发射角度是由控制器向与超声波测距仪传动连接的步进电机发送PWM信号来完成的。
进一步地,所述方法还包括:步骤6、控制器将储存在存储模块中的历史数据以及本浮标的识别信息发送至上位机。
进一步地,所述方法还包括:步骤7、所述上位机对获得的历史数据进行分析,以锚绳与水平面的角度为基准,对所述的历史记录进行分组,锚绳与水平面的角度相同的历史记录分入同一组中,以测量时间的顺序对每组的历史记录进行排序。
进一步地,所述步骤7中还包括,对应于锚绳与水平面的角度的每组历史记录,设置一个对应地阈值,基于排序后的每组历史记录,当出现淤泥深度超过阈值时,上位机发出警告信息。其中,所述警告信息包括浮标的位置、锚绳与水平面的角度、测量时间、淤泥深度以及清淤提醒。
实施本发明,具有如下有益效果:通过使用本发明的方法,使得能够在河流中既有的浮标能够对其所在位置处的河底淤泥的淤积情况进行实时地测量,并形成历史数据,通过对获得的数据进行分析,能够实时地获取该所在位置处的河底淤泥的淤积情况,准确、及时地了解淤积的变化,既能够应对日常的测量任务,同时也能够对于突发出现的大量淤积物堆积的情况及时地给出警告,能够大大地减少传统方式中测量河道淤泥深度付出的大量人力以及物力,大大地便利了河道的管理和清淤工作,提高了及时性和效率。
以上所揭露的仅为本发明的几个较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
- 一种用于自动监测河底淤泥的淤积状态的方法
- 一种用于监测河流河底淤泥的淤积状态的浮标