一种可水面滑行潜水摄影无人机设备
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及一种无人机摄影设备,更具体的说是一种可水面滑行潜水摄影无人机设备。
背景技术
随着科技的发展时代的进步,越来越多的高端设备被引入到我们的生活和工作当中,随着无人机在民用摄影行业中的应用逐渐变得广泛,摄影师对无人机的一般要求为完成航拍以实现某地域的地貌进行侦测或进行艺术创作,在地面操纵无人机以完成一些平常手段无法完成高空拍摄,但由于无人机体积小以及出于减重考虑电量不会很多,有时有可能会落到水面上,由此想到可发明一种可以在水下滑行并且能在潜水域实现浮潜摄影以达到在陆地操作即可对水域内画面进行侦测及艺术创作,并可对特定水域水质进行采样带回,因此发明了一种可水面滑行潜水摄影无人机设备。
发明内容
本发明涉及一种无人机摄影设备,更具体的说是一种可水面滑行潜水摄影无人机设备,通过防水外壳体安装其他的装置并传出信号以及在水下防护其他装置以防止进水产生故障,叶片及控制装置完成无人机各种动作的控制,摄像云台装置对摄像云台进行稳定控制,水面滑行装置实现设备在水面能够进行滑行,浮潜装置实现设备的沉潜及浮起动作并对水质进行采样,实现空中、水下、水面摄影以及水质采样的功能。
为解决上述技术问题,一种可水面滑行潜水摄影无人机设备,包括防水外壳体、叶片及控制装置、摄像云台装置、水面滑行装置、浮潜装置,通过防水外壳体安装其他的装置并传出信号以及在水下防护其他装置以防止进水产生故障,叶片及控制装置完成无人机各种动作的控制,摄像云台装置对摄像云台进行稳定控制,水面滑行装置实现设备在水面能够进行滑行,浮潜装置实现设备的沉潜及浮起动作并对水质进行采样,实现空中、水下、水面摄影以及水质采样的功能,其特征在于:叶片及控制装置安装固定在防水外壳体上,摄像云台装置安装固定在防水外壳体上,水面滑行装置安装固定在防水外壳体上,浮潜装置安装固定在防水外壳体上。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述的防水外壳体包括上壳体、下壳体、助力叶轮孔、摄像防水罩、下支撑架、防震浮潜腔、浮潜传动罩、滑行防水罩、滑行翻转块、铰链块、浮潜抽排水口、助力叶轮传动罩、马达安装块、控制器安装块,下壳体安装固定在上壳体上,助力叶轮孔设置在上壳体上,助力叶轮孔设置在下壳体上,摄像防水罩安装固定在下壳体上,下支撑架安装固定在下壳体上,防震浮潜腔安装固定在下支撑架上,浮潜传动罩安装固定在防震浮潜腔上,滑行防水罩安装固定在下壳体上。滑行防水罩转动安装在浮潜传动罩上,滑行翻转块安装固定在滑行防水罩上。铰链块铰链安装在滑行翻转块上,浮潜抽排水口设置在防震浮潜腔上,助力叶轮传动罩安装固定在上壳体上,马达安装块安装固定在下壳体上,控制器安装块安装固定在下壳体上。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述的叶片及控制装置包括上升叶片一、传动带轮一、微型伺服马达一、传动带轮二、助力叶片、控制器模块、上升叶片二、微型伺服马达二、上升叶片三、微型伺服马达三,上升叶片一转动安装在上壳体上,传动带轮一安装固定在上升叶片一上,微型伺服马达一安装固定在上升叶片一上,微型伺服马达一安装固定在马达安装块上,传动带轮二安装固定在助力叶片上,助力叶片转动安装在助力叶轮传动罩上控制器模块安装固定在控制器安装块上,上升叶片二转动安装在上壳体上,微型伺服马达二安装固定在上升叶片二上,微型伺服马达二安装固定在马达安装块上,上升叶片三转动安装在上壳体上,微型伺服马达三安装固定在上升叶片三上,微型伺服马达三安装固定在马达安装块上。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述的摄像云台装置包括云台安装板,弹簧连接块、减震稳定弹簧、云台固定板、云台伺服马达一、云台Y转轴、云台伺服马达二、云台伺服马达三、云台X转轴、云台Z转轴、摄像照相机,云台安装板安装固定在下壳体,弹簧连接块安装固定在云台安装板上,减震稳定弹簧一端安装固定在弹簧连接块上,云台固定板安装固定在减震稳定弹簧另一端上,云台伺服马达一安装固定在云台Z转轴上,云台Y转轴转动安装在云台X转轴上,云台伺服马达二安装固定在云台Y转轴上,云4台伺服电机安装固定在云台X转轴上,云台X转轴转动安装在云台固定板上,云台Z转轴转动安装在云台Y转轴上,摄像照相机安装固定在云台Z转轴上。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述的水面滑行装置包括翻转浮潜伺服电机、转销、不完全锥齿一、不完全锥齿二、翻转花键轴、滑移齿轮一、电磁块一、翻转伺服轴、齿轮一、翻转带轮一、翻转带轮二、滑行花键叶片轴、电磁块二、滑移齿轮二、滑动拨叉、电磁块三,翻转浮潜伺服电机安装固定在滑行翻转块上,转销转动安装在铰链块上,不完全锥齿一安装固定在转销上,不完全锥齿二和不完全锥齿一啮合,翻转花键轴转动安装在滑行翻转块上,滑移齿轮一滑动安装在翻转花键轴上,电磁块一安装固定在翻转花键轴上,翻转伺服轴安装固定在翻转浮潜伺服电机上,齿轮一安装固定在翻转伺服轴上,翻转带轮一安装固定在翻转伺服轴上,翻转带轮二安装固定在滑行花键叶片轴上,滑行花键叶片轴转动安装在滑行翻转块上,电磁块二安装固定在滑行翻转块上,滑移齿轮二滑动安装在滑行花键叶片轴上,滑动拨叉通过滑轨滑块滑动安装在滑行翻转块上,电磁块三安装固定在滑行翻转块上。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述的浮潜装置包括浮潜带轮一、浮潜齿轮、浮潜传动轴、浮潜带轮二、带座轴承一、安装管、活塞丝杠螺母、丝杠、带座轴承二,浮潜带轮一安装固定在浮潜传动轴上,浮潜齿轮安装固定在浮潜传动轴上,浮潜齿轮和滑移齿轮二啮合,浮潜传动轴转动安装在浮潜传动罩上,浮潜带轮二安装固定在丝杠上,带座轴承一安装固定在安装管上,安装管安装固定在下壳体上,活塞丝杠螺母螺纹安装在丝杠上,丝杠通过带座轴承一和带座轴承二转动安装在安装管上,带座轴承二安装固定在安装管上。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述防水外壳体下支撑架、防震浮潜腔、浮潜传动罩、浮潜抽排水口均有两个,助力叶轮孔、助力叶轮传动罩、马达安装块、控制器安装块均有四个。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述叶片及控制装置上升叶片二、微型伺服马达二均有两个,传动带轮一、传动带轮二均有四个。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述摄像云台装置弹簧连接块、减震稳定弹簧均有四个。
作为本技术方案的进一步优化,本发明一种可水面滑行潜水摄影无人机设备所述浮潜装置浮潜带轮一、浮潜齿轮、浮潜传动轴、浮潜带轮二、带座轴承一、安装管、活塞丝杠螺母、丝杠、带座轴承二均有两个。
本发明一种可水面滑行潜水摄影无人机设备有益效果为:
本发明涉及一种海水淡化设备,更具体的说是一种可水面滑行潜水摄影无人机设备,实现了通过防水外壳体安装其他的装置并利用测距雷达对电机动作进行监控,叶片及控制装置完成海水的供给以及冷却,摄像云台装置对淡化腔抽真空来产生负压,从而使海水在较低温度下蒸发,水面滑行装置实现对管路中各出阀门进行控制以形成密封腔从而实现能够抽取真空达到低压强,浮潜装置实现对长时间存放海水而积留大部分盐及矿物质的淡化板进行清洗,实现高质量的自动化海水淡化的功能。
附图说明
下面结合附图和具体实施方法对本发明做进一步详细的说明。
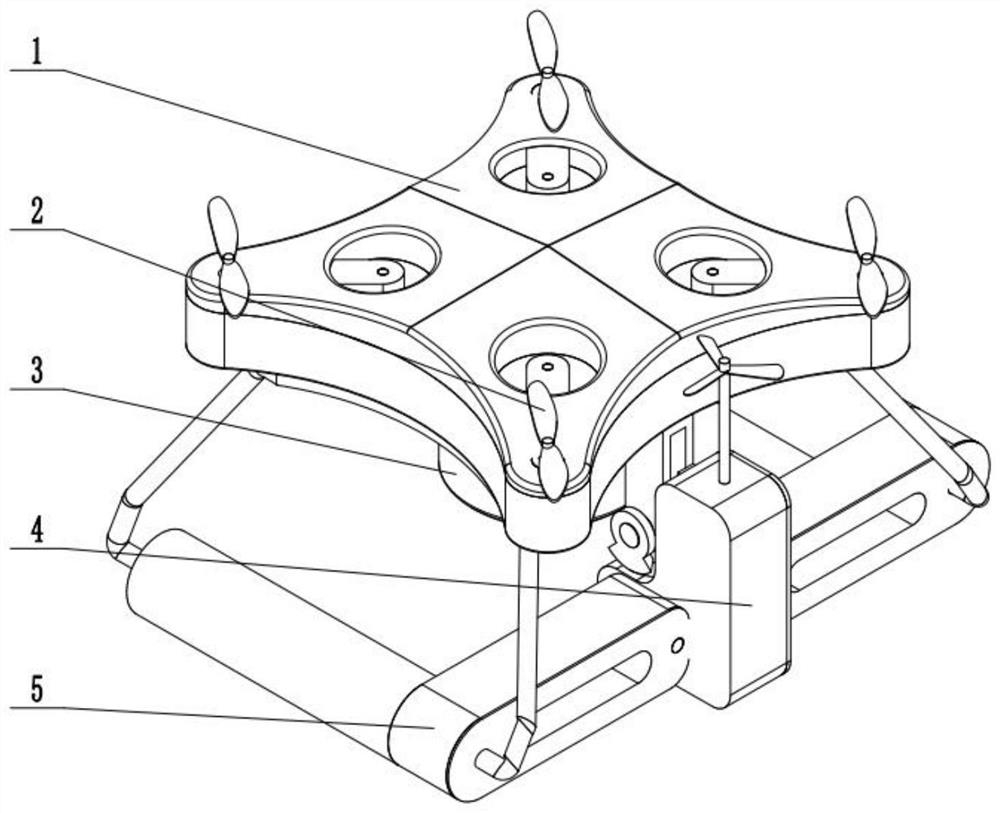
图1为本发明的整体结构示意图一。
图2为本发明的整体结构示意图二。
图3为本发明的整体结构示意图三。
图4为本发明的防水外壳体结构示意图一。
图5为本发明的防水外壳体结构示意图二。
图6为本发明的叶片及控制装置结构示意图。
图7为本发明的水面滑行装置结构示意图。
图8为本发明的摄像云台装置结构示意图。
图9为本发明的浮潜装置结构示意图。
图中:防水外壳体1;上壳体1-1;下壳体1-2;助力叶轮孔1-3;摄像防水罩1-4;下支撑架1-5;防震浮潜腔1-6;浮潜传动罩1-7;滑行防水罩1-8;滑行翻转块1-9;铰链块1-10;浮潜抽排水口1-11;助力叶轮传动罩1-12;马达安装块1-13;控制器安装块1-14;叶片及控制装置2;上升叶片一2-1;传动带轮一2-2;微型伺服马达一2-3;传动带轮二2-4;助力叶片2-5;控制器模块2-6;上升叶片二2-7;微型伺服马达二2-8;上升叶片三2-9;微型伺服马达三2-10;摄像云台装置3;云台安装板3-1,弹簧连接块3-2;减震稳定弹簧3-3;云台固定板3-4;云台伺服马达一3-5;云台Y转轴3-6;云台伺服马达二3-7;云台伺服马达三3-8;云台X转轴3-9;云台Z转轴3-10;摄像照相机3-11;水面滑行装置4;翻转浮潜伺服电机4-1;转销4-2;不完全锥齿一4-3;不完全锥齿二4-4;翻转花键轴4-5;滑移齿轮一4-6;电磁块一4-7;翻转伺服轴4-8;齿轮一4-9;翻转带轮一4-10;翻转带轮二4-11;滑行花键叶片轴4-12;电磁块二4-13;滑移齿轮二4-14;滑动拨叉4-15;电磁块三4-16;浮潜装置5;浮潜带轮一5-1;浮潜齿轮5-2;浮潜传动轴5-3;浮潜带轮二5-4;带座轴承一5-5;安装管5-6;活塞丝杠螺母5-7;丝杠5-8;带座轴承二5-9。
具体实施方式
具体实施方式一:
下面结合图1、2、3、4、5、6、7、8、9为解决上述技术问题,一种可水面滑行潜水摄影无人机设备,包括防水外壳体1、叶片及控制装置2、摄像云台装置3、水面滑行装置4、浮潜装置5,通过防水外壳体1安装其他的装置并利用测距雷达对电机动作进行监控,叶片及控制装置2完成海水的供给以及冷却,摄像云台装置3对淡化腔抽真空来产生负压,从而使海水在较低温度下蒸发,水面滑行装置4实现对管路中各出阀门进行控制以形成密封腔从而实现能够抽取真空达到低压强,浮潜装置5实现对长时间存放海水而积留大部分盐及矿物质的淡化板进行清洗,实现高质量的自动化海水淡化的功能,其特征在于:叶片及控制装置2安装固定在防水外壳体1上,摄像云台装置3安装固定在防水外壳体1上,水面滑行装置4安装固定在防水外壳体1上,浮潜装置5安装固定在防水外壳体1上。
具体实施方式二:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式一作进一步说明,所述的防水外壳体1包括上壳体1-1、下壳体1-2、助力叶轮孔1-3、摄像防水罩1-4、下支撑架1-5、防震浮潜腔1-6、浮潜传动罩1-7、滑行防水罩1-8、滑行翻转块1-9、铰链块1-10、浮潜抽排水口1-11、助力叶轮传动罩1-12、马达安装块1-13、控制器安装块1-14,下壳体1-2安装固定在上壳体1-1上,助力叶轮孔1-3设置在上壳体1-1上,助力叶轮孔1-3设置在下壳体1-2上,摄像防水罩1-4安装固定在下壳体1-2上,下支撑架1-5安装固定在下壳体1-2上,防震浮潜腔1-6安装固定在下支撑架1-5上,浮潜传动罩1-7安装固定在防震浮潜腔1-6上,滑行防水罩1-8安装固定在下壳体1-2上。滑行防水罩1-8转动安装在浮潜传动罩1-7上,滑行翻转块1-9安装固定在滑行防水罩1-8上。铰链块1-10铰链安装在滑行翻转块1-9上,浮潜抽排水口1-11设置在防震浮潜腔1-6上,助力叶轮传动罩1-12安装固定在上壳体1-1上,马达安装块1-13安装固定在下壳体1-2上,控制器安装块1-14安装固定在下壳体1-2上。
具体实施方式三:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式一作进一步说明,所述的叶片及控制装置2包括上升叶片一2-1、传动带轮一2-2、微型伺服马达一2-3、传动带轮二2-4、助力叶片2-5、控制器模块2-6、上升叶片二2-7、微型伺服马达二2-8、上升叶片三2-9、微型伺服马达三2-10,打开控制器模块2-6电源,并将设备平放于地面上,控制器模块2-6接收控制手柄的信号,使微型伺服马达一2-3、微型伺服马达二2-8、微型伺服马达三2-10同时转动,且微型伺服马达一2-2与微型伺服马达一2-10带动上升叶片一2-1与上升叶片三2-9的转向相同,两微型伺服马达二2-8带动两上升叶片二2-7的转向相同,且上升叶片二2-7转向与上升叶片一2-1、上升叶片三2-9转向相反,且翻转浮潜伺服电机4-1通电,使翻转带轮一4-10带动翻转带轮二4-11转动,从而带动滑行花键叶片轴4-12的叶片转动,同时传动带轮一2-2带动传动带轮二2-4转动使得助力叶片2-5也随之转动,使得整体力矩平衡,并逐渐加速至其升力大于整个设备的重力,设备上升至空中,调节控制手柄使得叶片升力等于设备整体重力时,设备在空中悬停,当需要转向时,控制上升叶片一2-1与上升叶片三2-9转速产生差异,则会产生扭矩带动整个设备发生倾斜转向,若要使设备在空中或水中实现翻转,可停止两微型伺服马达二2-8或停止微型伺服马达一2-3与微型伺服马达三2-10,使得扭矩带动整个设备翻转,实现无人机空中的各种动作,,上升叶片一2-1转动安装在上壳体1-1上,传动带轮一2-2安装固定在上升叶片一2-1上,微型伺服马达一2-3安装固定在上升叶片一2-1上,微型伺服马达一2-3安装固定在马达安装块1-13上,传动带轮二2-4安装固定在助力叶片2-5上,助力叶片2-5转动安装在助力叶轮传动罩1-12上控制器模块2-6安装固定在控制器安装块1-14上,上升叶片二2-7转动安装在上壳体1-1上,微型伺服马达二2-8安装固定在上升叶片二2-7上,微型伺服马达二2-8安装固定在马达安装块1-13上,上升叶片三2-9转动安装在上壳体1-1上,微型伺服马达三2-10安装固定在上升叶片三2-9上,微型伺服马达三2-10安装固定在马达安装块1-13上。
具体实施方式四:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式二作进一步说明,所述的摄像云台装置3包括云台安装板3-1,弹簧连接块3-2、减震稳定弹簧3-3、云台固定板3-4、云台伺服马达一3-5、云台Y转轴3-6、云台伺服马达二3-7、云台伺服马达三3-8、云台X转轴3-9、云台Z转轴3-10、摄像照相机3-11,同时云台伺服马达一3-5、云台伺服马达二3-7、云台伺服马达三3-8通过控制器模块2-6控制协同转动,云台Y转轴3-6、云台Z转轴3-10、带动云台X转轴3-9转动,由于减震稳定弹簧3-3作用,使得摄像照相机3-11保持相对稳定,既实现三轴稳定云台的功能,云台安装板3-1安装固定在下壳体1-2,弹簧连接块3-2安装固定在云台安装板3-1上,减震稳定弹簧3-3一端安装固定在弹簧连接块3-2上,云台固定板3-4安装固定在减震稳定弹簧3-3另一端上,云台伺服马达一3-5安装固定在云台Z转轴3-10上,云台Y转轴3-6转动安装在云台X转轴3-9上,云台伺服马达二3-7安装固定在云台Y转轴3-6上,云4台伺服电机3-8安装固定在云台X转轴3-9上,云台X转轴3-9转动安装在云台固定板3-4上,云台Z转轴3-10转动安装在云台Y转轴3-6上,摄像照相机3-11安装固定在云台Z转轴3-10上。
具体实施方式五:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式一作进一步说明,所述的水面滑行装置4包括翻转浮潜伺服电机4-1、转销4-2、不完全锥齿一4-3、不完全锥齿二4-4、翻转花键轴4-5、滑移齿轮一4-6、电磁块一4-7、翻转伺服轴4-8、齿轮一4-9、翻转带轮一4-10、翻转带轮二4-11、滑行花键叶片轴4-12、电磁块二4-13、滑移齿轮二4-14、滑动拨叉4-15、电磁块三4-16,当设备飞至水面附近时,控制手柄发信号给控制器模块2-6,控制器模块2-6使得电磁块一4-7通电排斥滑移齿轮一4-6与齿轮一4-9啮合带动不完全锥齿轮二4-4与不完全锥齿轮一4-3啮合,使得滑行翻转装置4整个向下翻转90度,既滑行花键叶片轴4-12伸入到靠近水面的设备下方,缓慢控制设备飞至水面上,由于防震浮潜腔1-6内的空腔,使得整个设备浮在水面上,此时控制滑移齿轮一4-6与齿轮一4-9断开啮合,翻转浮潜伺服电机4-1带动滑行花键叶片轴4-12转动即可实现整个设备在水面上的滑行动作,转向则与空中时的控制方式相同,当控制手柄发送信号给控制器模块2-6使得电磁块二4-13吸引滑动拨叉4-15带动滑移齿轮二4-14与单侧浮潜齿轮5-2啮合,翻转浮潜伺服电机4-1安装固定在滑行翻转块1-9上,转销4-2转动安装在铰链块1-10上,不完全锥齿一4-3安装固定在转销4-2上,不完全锥齿二4-4和不完全锥齿一4-3啮合,翻转花键轴4-5转动安装在滑行翻转块1-9上,滑移齿轮一4-6滑动安装在翻转花键轴4-5上,电磁块一4-7安装固定在翻转花键轴4-5上,翻转伺服轴4-8安装固定在翻转浮潜伺服电机4-1上,齿轮一4-9安装固定在翻转伺服轴4-8上,翻转带轮一4-10安装固定在翻转伺服轴4-8上,翻转带轮二4-11安装固定在滑行花键叶片轴4-12上,滑行花键叶片轴4-12转动安装在滑行翻转块1-9上,电磁块二4-13安装固定在滑行翻转块1-9上,滑移齿轮二4-14滑动安装在滑行花键叶片轴4-12上,滑动拨叉4-15通过滑轨滑块滑动安装在滑行翻转块1-9上,电磁块三4-16安装固定在滑行翻转块1-9上。
具体实施方式六:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式二作进一步说明,所述的浮潜装置5包括浮潜带轮一5-1、浮潜齿轮5-2、浮潜传动轴5-3、浮潜带轮二5-4、带座轴承一5-5、安装管5-6、活塞丝杠螺母5-7、丝杠5-8、带座轴承二5-9,浮潜带轮一5-1带动浮潜带轮二5-4转动使得丝杠5-8转动,活塞丝杠螺母5-7相对丝杠5-8螺纹转动并向活塞腔空腔方向移动,海水由浮潜抽排水口1-11进入单侧防震浮潜腔1-6中,使得整个设备向侧面倾斜,待到其整体与水面垂直后,控制手柄通过控制器模块2-6给到电磁看三4-16电信号使其通电,吸引滑动拨叉4-15拨动滑移齿轮二4-14与另一侧的浮潜齿轮5-2啮合,使得另一侧防震浮潜腔1-6也吸入海水,完成下潜动作,其他动作与在空中时相同,仅因介质不同,其动作变化会较空中慢很多,完成潜水区域摄影后,控制整个设备在水中调正并上升至接近水面,翻转浮潜伺服电机4-1翻转带动活塞丝杠螺母5-7向装水腔移动,将水从浮潜抽排水口1-11排出,实现上浮动作,设备在水面的起飞同陆地类似,但由于水面表面张力,其所需电机动力更大,且由于防震浮潜腔1-6空腔形状设计,会对水质进行采样带回,实现设备在空中、水面、水下完成各种动作并侦测、摄制或拍摄相应的照片、视频对其地质或水域进行分析或艺术创作的功能,浮潜带轮一5-1安装固定在浮潜传动轴5-3上,浮潜齿轮5-2安装固定在浮潜传动轴5-3上,浮潜齿轮5-2和滑移齿轮二4-14啮合,浮潜传动轴5-3转动安装在浮潜传动罩1-7上,浮潜带轮二5-4安装固定在丝杠5-8上,带座轴承一5-5安装固定在安装管5-6上,安装管5-6安装固定在下壳体1-2上,活塞丝杠螺母5-7螺纹安装在丝杠5-8上,丝杠5-8通过带座轴承一5-5和带座轴承二5-9转动安装在安装管5-6上,带座轴承二5-9安装固定在安装管5-6上。
具体实施方式七:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式二作进一步说明,所述防水外壳体1下支撑架1-5、防震浮潜腔1-6、浮潜传动罩1-7、浮潜抽排水口1-11均有两个,助力叶轮孔1-3、助力叶轮传动罩1-12、马达安装块1-13、控制器安装块1-14均有四个。
具体实施方式八:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式六作进一步说明,所述叶片及控制装置2上升叶片二2-7、微型伺服马达二2-8均有两个,传动带轮一2-2、传动带轮二2-4均有四个。
具体实施方式九:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式六作进一步说明,所述摄像云台装置3弹簧连接块3-2、减震稳定弹簧3-3均有四个。
具体实施方式十:
下面结合图1、2、3、4、5、6、7、8、9说明本实施方式,本实施方式对实施方式六作进一步说明,所述浮潜装置5浮潜带轮一5-1、浮潜齿轮5-2、浮潜传动轴5-3、浮潜带轮二5-4、带座轴承一5-5、安装管5-6、活塞丝杠螺母5-7、丝杠5-8、带座轴承二5-9均有两个。
本发明的工作原理是:
一种可水面滑行潜水摄影无人机设备的工作原理是,在使用前先检查好装置间的连接情况是否符合要求,打开控制器模块2-6电源,并将设备平放于地面上,控制器模块2-6接收控制手柄的信号,使微型伺服马达一2-3、微型伺服马达二2-8、微型伺服马达三2-10同时转动,且微型伺服马达一2-2与微型伺服马达一2-10带动上升叶片一2-1与上升叶片三2-9的转向相同,两微型伺服马达二2-8带动两上升叶片二2-7的转向相同,且上升叶片二2-7转向与上升叶片一2-1、上升叶片三2-9转向相反,且翻转浮潜伺服电机4-1通电,使翻转带轮一4-10带动翻转带轮二4-11转动,从而带动滑行花键叶片轴4-12的叶片转动,同时传动带轮一2-2带动传动带轮二2-4转动使得助力叶片2-5也随之转动,使得整体力矩平衡,并逐渐加速至其升力大于整个设备的重力,设备上升至空中,调节控制手柄使得叶片升力等于设备整体重力时,设备在空中悬停,当需要转向时,控制上升叶片一2-1与上升叶片三2-9转速产生差异,则会产生扭矩带动整个设备发生倾斜转向,若要使设备在空中或水中实现翻转,可停止两微型伺服马达二2-8或停止微型伺服马达一2-3与微型伺服马达三2-10,使得扭矩带动整个设备翻转,实现无人机空中的各种动作,同时云台伺服马达一3-5、云台伺服马达二3-7、云台伺服马达三3-8通过控制器模块2-6控制协同转动,云台Y转轴3-6、云台Z转轴3-10、带动云台X转轴3-9转动,由于减震稳定弹簧3-3作用,使得摄像照相机3-11保持相对稳定,既实现三轴稳定云台的功能,当设备飞至水面附近时,控制手柄发信号给控制器模块2-6,控制器模块2-6使得电磁块一4-7通电排斥滑移齿轮一4-6与齿轮一4-9啮合带动不完全锥齿轮二4-4与不完全锥齿轮一4-3啮合,使得滑行翻转装置4整个向下翻转90度,既滑行花键叶片轴4-12伸入到靠近水面的设备下方,缓慢控制设备飞至水面上,由于防震浮潜腔1-6内的空腔,使得整个设备浮在水面上,此时控制滑移齿轮一4-6与齿轮一4-9断开啮合,翻转浮潜伺服电机4-1带动滑行花键叶片轴4-12转动即可实现整个设备在水面上的滑行动作,转向则与空中时的控制方式相同,当控制手柄发送信号给控制器模块2-6使得电磁块二4-13吸引滑动拨叉4-15带动滑移齿轮二4-14与单侧浮潜齿轮5-2啮合,浮潜带轮一5-1带动浮潜带轮二5-4转动使得丝杠5-8转动,活塞丝杠螺母5-7相对丝杠5-8螺纹转动并向活塞腔空腔方向移动,海水由浮潜抽排水口1-11进入单侧防震浮潜腔1-6中,使得整个设备向侧面倾斜,待到其整体与水面垂直后,控制手柄通过控制器模块2-6给到电磁看三4-16电信号使其通电,吸引滑动拨叉4-15拨动滑移齿轮二4-14与另一侧的浮潜齿轮5-2啮合,使得另一侧防震浮潜腔1-6也吸入海水,完成下潜动作,其他动作与在空中时相同,仅因介质不同,其动作变化会较空中慢很多,完成潜水区域摄影后,控制整个设备在水中调正并上升至接近水面,翻转浮潜伺服电机4-1翻转带动活塞丝杠螺母5-7向装水腔移动,将水从浮潜抽排水口1-11排出,实现上浮动作,设备在水面的起飞同陆地类似,但由于水面表面张力,其所需电机动力更大,且由于防震浮潜腔1-6空腔形状设计,会对水质进行采样带回,实现设备在空中、水面、水下完成各种动作并侦测、摄制或拍摄相应的照片、视频对其地质或水域进行分析或艺术创作的功能。
当然,上述说明并非对本发明的限制,本发明也不仅限于述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种可水面滑行潜水摄影无人机设备
- 自适应变姿态空中水面潜水无人机