一种交叉双旋翼直升飞机及平尾操控系统
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及飞行器技术领域,特别涉及一种交叉双旋翼直升飞机及平尾操控系统。
背景技术
飞机的水平尾翼简称平尾,是飞机纵向平衡、稳定和操纵的翼面。平尾左右对称的分布在飞机两侧,通常,平尾的前半部是固定的,后半部铰接在前半部上,称为升降舵,通过改变升降舵角度来改变平尾的角度。此处将朝向飞机头部的方向定义为前,相应地朝向机尾的方向定义为后。
在飞机飞行过程中,平尾主要实现以下作用:
第一、飞行过程中升力不可能在任何时刻都通过重心位置,因而存在一个不平衡力矩,通过改变后半部相对前半部分的姿态平衡这个力矩;
第二、飞行过程中会遇到各种干扰使得飞机偏离原本的姿态,通过改变后半部分相对前半部分倾斜的角度,恢复飞机姿态,对飞机起纵向稳定作用;
第三、飞行过程中需要主动改变姿态,如爬升、平飞、下滑等。在这种需要克服稳定力矩的时候,平尾通过改变后半部的姿态可以产生一个抬头力矩操纵飞机改变姿态。
从以上描述可以看出,现有技术中均是通过改变后半部相对前半部的姿态实现飞机在飞行过程中的相应功能。
但是当前传统分段式平尾设计变距较慢,力矩供给效率低,且结构复杂,成本高。
发明内容
本发明的目的是提供一种变矩快速,能够提高力矩供给效率的平尾操控系统。另外本发明的另一目的为提供一种包括上述平尾操控系统的交叉双旋翼直升飞机。
本发明提供一种平尾操控系统,包括驱动部件、转动部件和两个平尾,两所述平尾能够通过转动部件转动支撑于机身,所述转动部件的中心轴平行于所述平尾的长度延伸方向,所述驱动部件用于驱动两所述平尾绕所述转动部件的中心轴转动。
与背景技术中部分与机身固定的平尾相比,本发明中的平尾与机身通过转动部件转动连接,在驱动部件的作用下,整个平尾能够相对机身转动预定角度,以满足飞机飞行时不同工况的需求。因整个平尾都能够相对机身转动,平尾转动较小的角度就能够实现较大的力矩的变化,大大提高了力矩供给效率。
可选的,还包括中心杆,所述中心杆的两端分别连接固定两个所述平尾,所述中心杆通过所述转动部件转动支撑于所述机身,所述驱动部件驱动所述中心杆绕其中心轴转动。
可选的,所述转动部件包括轴承座和轴承,所述轴承包括相对转动的内圈和外圈,所述轴承的外圈安装固定于所述轴承座的安装孔,所述内圈与所述中心杆定位安装,并且所述中心杆的端部过相应侧的所述内圈连接固定所述平尾。
可选的,还包括弹性挡圈,所述轴承座的内孔为台阶孔,所述台阶孔包括大径孔段和小径孔段,二者连接位置形成台阶面,所述大径孔段还设置有环形凹槽,用于安装弹性挡圈,所述轴承外圈安装于所述台阶面和所述弹性挡圈之间。
可选的,还包括限位挡圈,所述中心杆上还设置有与所述限位挡圈配合安装的限位凹槽,所述限位挡圈用于限制所述内圈向外的轴向位移量。
可选的,所述平尾的外轮廓为流线型结构,所述平尾为中空结构,所述中空结构的内部设置有支撑肋筋,所述中心杆的端部穿过所述支撑肋筋并且通过螺栓固定连接所述支撑肋筋;
或者,所述平尾的外轮廓为流线型结构,所述平尾为中空结构,所述中空结构的内部设置有支撑肋筋,所述中心杆至少端部轴段为实体结构,所述支撑肋筋朝向所述中心杆的侧壁设置有安装槽,所述中心杆端部部分轴段支撑于所述安装槽,还包括轴向布置的螺钉,所述螺钉穿过所述安装槽的底壁连接固定所述中心杆。
可选的,所述驱动部件包括舵机和连接件,所述连接件的一端与所述舵机的驱动轴铰接,另一端与所述中心杆连接固定,所述舵机的驱动轴能够沿竖直方向动作通过所述连接件带动所述中心杆转动。
可选的,所述连接件包括套筒,所述中心杆中间杆段套设于所述套筒内部,并且所述中间杆段和所述套筒设置有径向延伸的同轴通孔,用于安装固定螺栓。
可选的,所述连接件与所述舵机的驱动轴二者通过球轴承连接,所述连接件朝向所述舵机的一端包括U型安装架,所述球轴承安装于所述U型安装架的两平行壁之间。
此外,本发明还提供了一种交叉双旋翼直升飞机,包括机身,还包括上述任一项所述的平尾操控系统。
本发明所提供的交叉双旋翼直升飞机具有上述平尾操控系统,故交叉双旋翼直升飞机也具有平尾操控系统的上述技术效果。
附图说明
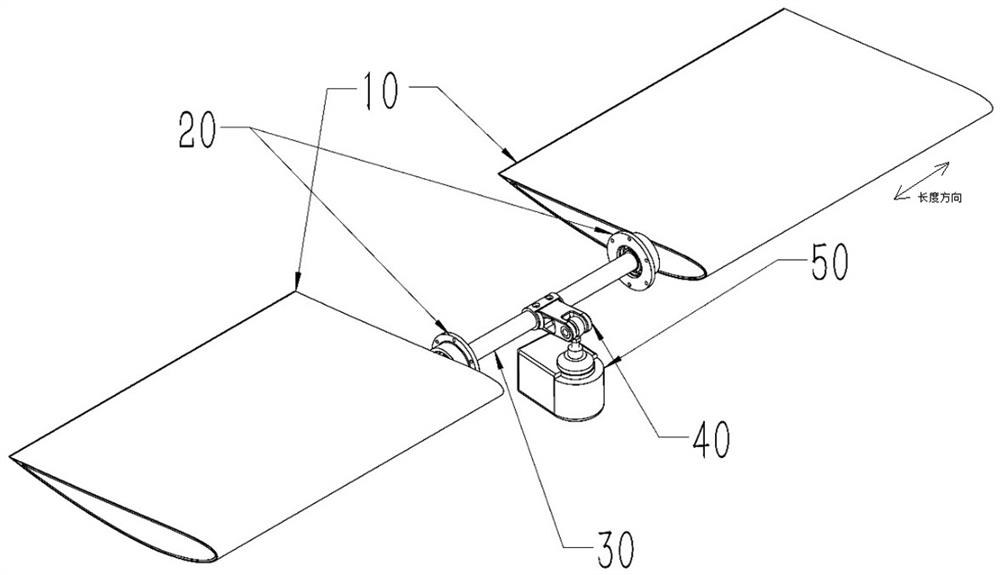
图1为本发明一种实施例中平尾操控系统的结构示意图;
图2为本发明一种实施例中转动部件的结构示意图;
图3为图2中A-A剖视图;
图4为图2中所示转动部件的另一侧示意图;
图5为本发明一种实施例中连接件与舵机驱动轴连接位置的放大图;
图6为本发明一种实施例中连接件与中心杆连接位置的局部示意图;
图7为本发明一种实施例中中心杆与平尾连接固定位置的局部示意图。
其中,图1至图7中附图标记与各部件之间的一一对应关系如下所示:
10-平尾;11-支撑肋筋;12-螺钉;20-转动部件;201-轴承座;202-轴承;201a-螺栓孔;21-限位挡圈;23-弹性挡圈;2021-外圈;2022-内圈;30-中心杆;40-连接件;401-套筒;402-U型安装架;40a-通孔;41-定位钢套;42-关节深沟球轴承球;43-关节深沟球轴承球头;50-舵机;60-螺栓。
具体实施方式
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
请参考图1至图5,图1为本发明一种实施例中平尾操控系统的结构示意图;图2为本发明一种实施例中转动部件的结构示意图;图3为图2中A-A剖视图;图4为图2中所示转动部件的另一侧示意图;图5为本发明一种实施例中连接件与舵机驱动轴连接位置的放大图;图6为本发明一种实施例中连接件与中心杆连接位置的局部示意图;图7为本发明一种实施例中中心杆与平尾连接固定位置的局部示意图。
本发明提供了一种平尾操控系统,该系统包括驱动部件、转动部件20和两个平尾10。平尾10的主体外轮廓可以为整体式结构。本文所谓的整体式结构指平尾10主体为一体结构。平尾10主体的材料只要满足使用需求即可,本文不做限定。
本发明中的两个平尾10左右对称设置于机身,并且能够通过转动部件20转动支撑于机身,转动部件20的中心轴平行于平尾10的长度延伸方向,转动部件20主要是实现平尾10与机身二者的转动,转动部件20可以为轴承,当然也可以为其他能够实现两部件相互转动即可。
本发明中的驱动部件用于驱动两平尾10绕所述转动部件20的中心轴转动。驱动部件可以为电驱动部件,当然也可以为液压驱动部件,在后文中将详细介绍一种具体的驱动部件,详见后文描述。
与背景技术中部分与机身固定的平尾10相比,本发明中的平尾10与机身通过转动部件20转动连接,在驱动部件的作用下,整个平尾10能够相对机身转动预定角度,以满足飞机飞行时不同工况的需求。因整个平尾10都能够相对机身转动,平尾10转动较小的角度就能够实现较大的力矩的变化,大大提高了力矩供给效率。
在变矩过程中,位于飞机两侧的平尾10通常需要具有变矩同步性,为了尽量提高两平尾10变矩的同步性,本文还进行了如下改进。
在一种具体实施方式中,平尾操控系统进一步包括中心杆30,中心杆30的两端分别连接固定两个平尾10,中心杆30通过转动部件20转动支撑于机身,转动部件20的中心轴平行于平尾10的长度延伸方向,图1中标示出了平尾的长度方向。驱动部件驱动中心杆30绕其中心轴转动。
在进行变矩控制时,驱动部件驱动中心轴转动,中心轴转动同时带动位于其两侧的平尾10绕其中心轴转动,以实现两平尾10的同步转动,以调整平尾10姿态适应飞机不同工况的需求。
在一种具体实施例中,转动部件20可以包括轴承座201和轴承202,轴承202包括相对转动的内圈2022和外圈2021,轴承202的外圈2021安装固定于轴承座201的安装孔,内圈2022与中心杆30定位安装,并且中心杆30的端部过相应侧的内圈2022连接固定平尾10。轴承座201上可以加工有螺栓孔201a,通过螺栓与机身固定连接。当然轴承座201也可以通过其他方式与机身固定连接,例如焊接等。
轴承结构紧凑,体积小,能够满足在小空间的安装需求,有利于满足飞机小型化设计需求。
上述实施例中,轴承座201的内孔为台阶孔,台阶孔包括大径孔段和小径孔段,二者连接位置形成台阶面,大径孔段还设置有环形凹槽,用于安装弹性挡圈23,轴承外圈2021安装于台阶面和弹性挡圈23之间。也就是说,弹性挡圈23和台阶面起到对轴承外圈2021两侧位移的限位,弹性挡圈23和台阶面二者限定轴承外圈2021的轴向位置。
台阶面的径向宽度、弹性挡圈23的大小可以根据具体轴承设置,只要不影响轴承的使用即可。
上述实施例中,通过台阶面和弹性挡圈23限定轴承外圈2021的轴向位移,有利于避免轴承轴向窜动,提高系统整体工作稳定性。
轴承可以为深沟球轴承,当然也可以为其他类型的轴承,例如滚子轴承或者圆锥滚子轴承。
进一步地,平尾操控系统还可以包括限位挡圈21,中心杆30上还设置有与限位挡圈21配合安装的限位凹槽(图中未示出),限位挡圈21用于限制内圈2022向外的轴向位移量。需要说明的是,此处将远离中心杆30的中心位置的方向定义为外。
环形凹槽和限位凹槽虽然在附图中未示出,但是并不妨碍本领域内技术人员对本文技术方案的理解和实施。
平尾操控系统中的平尾10为中空结构,中空结构的内部设置有支撑肋筋11,中心杆30的端部通过螺栓或螺钉固定螺钉支撑肋筋11。如图中示出了中心杆30端部为实体结构,支撑肋筋11朝向中心杆30的侧壁设置有安装槽,中心杆30靠近端部的部分轴段支撑于安装槽内部,螺钉12轴向设置,螺钉12穿过所述安装槽的底壁连接固定所述中心杆30。具体安装时,中心杆30的末端部可以穿过肋筋,这样中心杆30对平尾10能够起到一定的支撑作用,增强机构稳定性。
为了降低飞机的整体重量,中心杆30的部分轴段也可以设置为空心轴。
上述各实施例中,驱动部件还具体包括舵机50和连接件40,连接件40的一端与舵机50的驱动轴铰接,另一端与中心杆30连接固定,舵机50的驱动轴能够沿竖直方向动作通过连接件40带动中心杆30转动。
从上文描述可以看出,本文中的舵机50为直线舵机,驱动轴沿直线往复运动,通过控制驱动轴直线放线的位移,以实现中心杆30转动角度的控制,以使平尾转动预定角度。
舵机50的伺服系统由可变宽度的脉冲来控制,控制精度比较高,能够实现平尾10较小角度的调节,提高调节的灵活性,并且舵机50的体积相对比较小,可降低安装空间,满足小型飞机的使用需求。
在一种具体实施例中,连接件40可以包括套筒401,中心杆30中间杆段套设于套筒401内部,并且中间杆段和套筒401设置有径向延伸的同轴通孔,用于安装固定螺栓60。也就是说,连接件40靠近中心杆30的一侧设置有套筒401,中心杆30安装于套筒401内部,二者通过一个或者两个或者更多的螺栓60锁紧。本文附图示出了中心杆30和套筒401通过两个螺栓锁定的具体实施方式。图5中示出了套筒401设置两个通孔40a的示意图。
当然,为了两者连接位置还可以增加垫圈、垫片等弹性部件。
当然,连接件40和中心杆30的连接固定方式不局限于本文描述,二者可以通过焊接方式固定。
上述各实施例中,连接件40与舵机50的驱动轴二者通过球轴承连接,连接件40朝向舵机50的一端包括U型安装架402,球轴承安装于U型安装架402的两平行壁之间。球轴承可以为关节深沟球轴承,其中关节深沟球轴承球头43可以安装于舵机50的驱动轴,关节深沟球轴承球42现位于U型架的两平行壁之间。具体地,深沟球轴承球42可以与定位钢套41平面接触定位、紧固连接。
本发明还提供了一种交叉双旋翼直升飞机,包括机身以及上述任一实施例所述的平尾操控系统。
本发明所提供的交叉双旋翼直升飞机具有上述平尾操控系统,故交叉双旋翼直升飞机也具有平尾操控系统的上述技术效果。
平尾可以安装于交叉双旋翼直升飞机的尾部。
交叉双旋翼直升飞机其他结构可以参考现有技术,本文不做赘述。
以上对本发明所提供的一种交叉双旋翼直升飞机及平尾操控系统进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 一种交叉双旋翼直升飞机及平尾操控系统
- 一种交叉双旋翼直升飞机及平尾操控系统