用于生物安全柜的反馈机构
文献发布时间:2023-06-19 10:25:58
技术领域
本发明涉及一种用于医学设备的定位装置,更具体地涉及一种用于生物安全柜的反馈机构。
背景技术
在医学试验中,一些有毒的化学物质具有挥发性,为了不使这些污染气体泄漏并将它们净化,通常会使用生物安全柜(BSC)来对它们进行操作。
BSC通常包括实验室以及大而沉重(典型地有1.8米长,1.2米宽)的玻璃窗,它位于试验室的前面。可以手动使玻璃窗在预定的行程中移动。在靠近玻璃窗的行程中间的某个位置被称为“工作位置”。当玻璃窗的下边缘到达工作位置时,BSC的工作性能最好。
现在的问题是,当用户想将玻璃窗移到工作位置时,玻璃窗由于其很大的重量和体积总是被移出工作位置。
根据YY0569的生物安全柜行业标准,在BSC中风机产生的气流流速等标准是基于工作位置来确定的,因此一旦玻璃窗不能准确轻易地到达工作位置,将会导致各种参数不符合预期标准,从而导致工作性能下降,甚至有可能产生危险。
因此,当玻璃窗到达工作位置时,用户需要精准的反馈,以允许用户准确而轻松地将玻璃窗移动到工作位置。
发明内容
本发明提供了一种用于包括可移动的玻璃窗以及位于所述玻璃窗的至少一部分的前方的盖板的生物安全柜的反馈机构,这种反馈机构允许用户准确而轻松地将窗户移动到工作位置。
具体地,反馈机构包括监测控制部件,监测控制部件包括滚轮元件,该滚轮元件相对于盖板固定设置并且包括可滚动的滚轮;以及接触部件,该接触部件相对于玻璃窗固定设置,以使得接触部件能够随着玻璃窗的移动而相对于滚轮移动,接触部件包括用于接纳滚轮的凹部,其中,当玻璃窗相对于盖板移动时,接触部件随玻璃窗移动到与滚轮对应的位置,从而滚轮滚入凹部,使得反馈机构产生触觉反馈。使用者能够通过反馈机构产生的触觉反馈来判断玻璃窗已到达工作位置。
在一优选实施例中,监测控制部件还包括至少第一微动开关和第二微动开关,第一微动开关和第二微动开关相对于盖板固定设置,并且构造成当滚轮滚入凹部时与接触部件相接触,从而产生第一触发信号和第二触发信号,第一触发信号和第二触发信号用于反馈滚轮相对于凹部的位置。包括滚轮元件和微动开关两者的监测控制部件允许使用者通过反馈机构产生的触觉反馈和数字反馈两者来判断玻璃窗已到达工作位置。
进一步地,第一微动开关和第二微动开关包括动臂,并且微动开关与接触部件相接触包括微动开关的动臂受到接触部件按压以产生第一触发信号和第二触发信号。
在一优选实施例中,监测控制部件的滚轮元件设置在盖板的侧部上,并且对应地,接触部件设置在玻璃窗的侧部上。
在其它实施例中,监测控制部件的滚轮元件设置在盖板的面向玻璃窗的表面上,而接触部件设置在玻璃窗的面向盖板的表面上。
在一优选实施例中,监测控制部件包括框架,滚轮元件和第一和第二微动开关固定在框架上。并且框架可相对于盖板固定设置,便于安装。
在一优选实施例中,第一微动开关和第二微动开关沿着玻璃窗相对于盖板的移动方向位于滚轮元件的上下两侧。由此,当两个微动开关都与接触部件接触时,两者都产生触发信号,这两个信号作为是否在工作位置的判断依据。
在一优选实施例中,滚轮元件是弹簧驱动滚轮元件,其还包括滚轮承载部以及设置在滚轮承载部内的弹簧。弹簧的张紧和释放可用于产生触觉反馈。
进一步地,弹簧驱动滚轮元件还包括螺帽,螺帽构造成旋转地调节弹簧,以改变触觉反馈的力度大小,获得合适的反馈力。
在一优选实施例中,接触部件的凹部居中地定位在接触部件中间,并且其中,并且滚轮元件居中地设置在框架的中间部分上。
本发明还提供了一种生物安全柜,该生物安全柜包括任一上述反馈机构,以实现生物安全柜的玻璃窗的位置反馈。
本文所描述的反馈机构的额外特征和优点将在下文的详细描述中陈述,并且通过下文对于本领域技术人员显然或者从通过实践本文所描述的实施例而被本领域技术人员认识到,这些描述包括下文的详细描述、权利要求、以及附图。
附图说明
参考以上目的,本发明的技术特征在下面的权利要求中清楚地描述,并且其优点从以下参照附图的详细描述中显而易见,附图以示例方式示出了本发明的优选实施例,而不限制本发明构思的范围。
图1示出了生物安全柜的立体图;
图2示出了生物安全柜的安装有包括根据本发明实施例的反馈机构的部分的视图;
图3示出了根据本发明的一种实施例的反馈机构的监测控制部件的示意图;
图4示出了图3的监测控制部件的滚轮元件的示意图;
图5示出了根据本发明的一种实施例的反馈机构的接触部件的示意图;
图6示出了根据本发明的另一种实施例的反馈机构的监测控制部件的示意图;
图7示出了当生物安全柜的玻璃窗未进入工作位置时根据本发明的另一种实施例的反馈机构的位置的立体图;以及
图8示出了当生物安全柜的玻璃窗进入工作位置时根据本发明的另一种实施例的反馈机构的位置的立体图。
附图标记
1 生物安全柜;
2 玻璃窗;
3 盖板;
4 人机界面;
10 反馈机构;
100 监测控制部件;
110 滚轮元件;
111 滚轮;
112 滚轮承载部;
113 螺帽;
120a 第一微动开关;
120b 第二微动开关;
121a 动臂;
121b 动臂;
130 框架;
200 接触部件;
210 凸部;以及
220 凹部。
具体实施方式
以下将结合附图对本发明的实施例进行详细说明,以便更清楚理解本发明的目的、特点和优点。应理解的是,附图所示的实施例并不是对本发明范围的限制,而只是为了说明本发明技术方案的实质精神。
在本文中,所描述的方向是根据使用者在工作时的位置来定义的,其中“前方”是指使用者在工作时朝向使用者的方向;“上”是指使用者在工作时沿向上的方向;并且“下”是指使用者在工作时沿向下的方向。
在本文中使用的术语“触觉反馈”是指使用者在使用本发明的反馈机构时,由使用者接触反馈机构或反馈机构所附连的部分所传递的作用力的力学刺激。通过该力学刺激,使用者可以知晓玻璃窗是否到达工作位置。
在本文中使用的术语“数字反馈”是指使用者在使用本发明的反馈机构时,因电子部件的触发、在本文中为微动开关的触发而在人机界面上显示的电子信号。在本文中,数字反馈表征为在人机界面上显示“1”的数字信号,使用者可以利用这种数字信号判断玻璃窗是否到达工作位置。
为了便于说明,在以下的描述中,相同或相似的部件使用相同的参考标记。应当理解的是,本文中的“第一”和“第二”可以进行互换而不影响对实施例的描述。
图1和2示出了安装有根据本发明的反馈机构的生物安全柜1的视图,该生物安全柜1包括可移动的玻璃窗2以及位于玻璃窗2的至少一部分前方的盖板3,盖板的装饰条在图2中被移除。如图所示,该生物安全柜安装有反馈机构10,反馈机构包括监测控制部件和接触部件。以下将结合图3-5详细描述本发明实施例的监测控制部件和接触部件。
图3详细示出了根据本发明的一实施例的反馈机构的监测控制部件100,该监测控制部件包括滚轮元件110以及可选地框架130。滚轮元件110可相对于盖板3固定设置、优选地设置在盖板3的侧部上;或者滚轮元件110可固定在框架130上,并且框架130可例如通过螺纹连接来相对于盖板3固定设置。
参照图4,滚轮元件110包括可滚动的滚轮111以及滚轮承载部112,该滚轮元件110定位成使得其滚轮111从盖板3朝向玻璃窗2。进一步地,滚轮元件110还包括弹簧(未示出),该弹簧设置在滚轮承载部112内,并连接于滚轮111,由此当滚轮111受到压力(例如,如下所述,与接触部件的接触产生的压力)时,弹簧被压缩,而当滚轮111的压力消失时,弹簧被释放,从而允许滚轮111在非平面上进行滚动。
上述弹簧驱动的滚轮元件110还包括螺帽113,该螺帽构造成旋转地调节弹簧,以改变触觉反馈的力度大小。
图5示出了根据反馈机构10的接触部件200,该接触部件相对于玻璃窗2固定设置、优选地设置在玻璃窗的侧部上,以使得接触部件200能够随着玻璃窗2的移动而相对于监测控制部件100的滚轮元件110的滚轮111移动。
参照图2,应当注意的是,虽然优选地,监测控制部件的滚轮元件设置在盖板的侧部上,并且对应地,接触部件设置在玻璃窗的侧部上,使得接触部件能够相对于滚轮移动。但是本领域技术人员可以采取其它方法实现这个目的,比如将监测控制部件的滚轮元件设置在盖板的面向玻璃窗的表面上,而接触部件设置在玻璃窗的面向盖板的表面上。
返回参照图5,接触部件200包括用于对滚轮111施加压力的凸部210以及用于接纳滚轮的凹部220。凸部210和凹部220的形状共同设计为两个等腰梯形,使得当使用者从下向上推动或从上向下拉动玻璃窗时都允许凸部210和凹部220先后接触滚轮,但这仅是一种示例,并且可以采用其它合适的接触部件的形状,只要玻璃窗进入工作位置时滚轮111经过了凸部并进入凹部即可。此外,在本发明中,接触部件200的凹部220居中地定位在接触部件200中间,并且其中,并且滚轮元件110对应地居中设置在框架130的中间部分上,但这同样仅仅是示例而非限制。
当生物安全柜1的玻璃窗2未进入工作位置时,接触部件200与监测控制部件100的滚轮元件110的滚轮111不接触。
当使用者正在推动或拉动玻璃窗2相对于盖板3移动时,随玻璃窗2移动到与滚轮111对应的位置,使得滚轮111首先沿着接触部件200的凸部210并受到由凸部210作用的压力,从而压缩弹簧,并且摩擦力随之增大。
当生物安全柜1的玻璃窗2进入工作位置时,滚轮111滚入凹部220并释放压力,由此摩擦力突然减小,使得使用者通过反馈机构产生的触觉反馈,提醒使用者玻璃窗2已到达工作位置。
如图6所示,根据本发明的另一实施例,反馈机构包括监测控制部件100以及接触部件200,该监测控制部件100包括类似于图3的滚轮元件110以及可选的框架130,因此对于相关的类似部件,下文不再赘述。
如图所示,监测控制部件100还包括至少第一微动开关120a和第二微动开关120b,第一微动开关和第二微动开关设置成相对于盖板3固定,并且沿着玻璃窗相对于盖板3的移动方向分别位于滚轮元件的上侧和下侧,并且彼此间隔开接触部件200的凹部220的距离。
第一微动开关120a和第二微动开关120b构造成当滚轮滚入凹部时与接触部件相接触,从而产生第一触发信号和第二触发信号。具体地,第一微动开关120a和第二微动开关120b分别包括动臂121a、121b,当滚轮111滚入凹部220时,这些动臂与接触部件200的相接触,从而受到按压,以产生第一触发信号和第二触发信号,以用于反馈滚轮相对于凹部的位置。这些触发信号是数字反馈,其可以经由人机界面4(图1)来反馈给使用者。例如,微动开关120a、120b可经由导线联接于人机界面4,使得使用者可以从人机界面4上看见微动开关的数字反馈。
类似地,可选地滚轮元件110以及第一微动开关120a和第二微动开关120b分别相对于盖板3固定设置;或者监测控制部件包括框架130,使得滚轮元件110以及第一微动开关120a和第二微动开关120b固定在框架130上,并且框架130相对于盖板3固定设置。
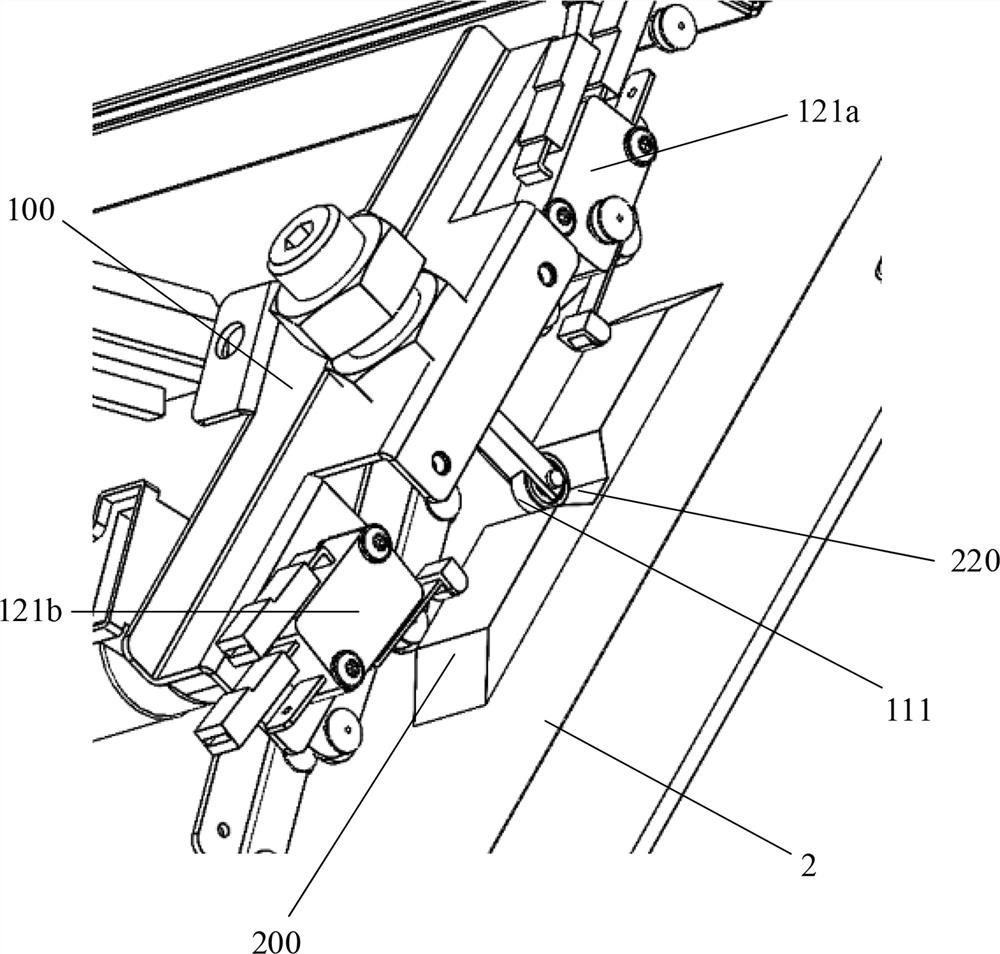
图7和8分别示出了根据本发明的另一实施例的当生物安全柜的玻璃窗未进入工作位置和进入工作位置时反馈机构10的监测控制部件100与接触部件200的相对位置的立体图。如图7所示,当使用者正使玻璃窗2朝向公作位置移动时,接触部件200随玻璃窗2移动到与滚轮111对应的位置,使得滚轮111首先沿着接触部件200的凸部210并受到由凸部210作用的压力,并且摩擦力随之增大。值得注意的是,第一微动开关120a的动臂或第二微动开关120b的动臂可能已经先于滚轮111而与凸部210接触,并受到按压,从而产生触发信号,但此时微动开关120a、120b中的另一个不产生触发信号,由此使用者可以判断玻璃窗未进入工作位置。
如图8所示,当玻璃窗2进入工作位置时,滚轮111滚入凹部220并释放压力,由此摩擦力突然减小,产生触觉反馈。与此同时,第一微动开关120a和第二微动开关120b两者都接触凸部,并且两者都产生数字反馈,使得使用者可以通过反馈机构产生的触觉反馈和数字反馈两者来判断玻璃窗2已到达工作位置。
虽然以上结合了较佳实施例对本发明的结构进行了说明,但是本技术领域中的普通技术人员应当认识到,上述示例仅是用来说明的,而不能作为对本发明的限制。因此,可以对本发明进行修改和变型,这些修改和变型都将落在本申请所附权利要求书所限定的范围之内。
- 用于生物安全柜的反馈机构
- 用于生物安全柜的反馈机构