基于复合位置控制器的永磁无刷直流电机位置伺服系统
文献发布时间:2023-06-19 10:27:30
技术领域
本发明属于永磁无刷直流电机的控制方法,尤其是一种基于扩张状态观测器和滑模控制的永磁无刷直流电机位置伺服系统控制方法。
背景技术
永磁无刷直流电机是随着电力电子技术、制造业和新型材料的迅速发展而发展起来的一种新型直流电机,因其具有结构简单、运行可靠、维护方便、效率高、无励磁损耗以及调速性能好等一系列优点,从而被广泛应用于航空航天、家用电器、仪器仪表、化工、医疗器械等工业领域。
目前,永磁无刷直流电机一般采用PID控制与矢量控制结构相结合的控制方式,但是由于电机在运行过程中会遭受各种干扰如外界电磁干扰、负载变化、摩擦等因素的影响,传统的线性控制如PID控制无法有效应对这些干扰,进而影响系统稳定性。因此,需要设计一些非线性控制算法来提高系统性能,如鲁棒控制,预测控制,有限时间控制,滑模控制,自适应控制和智能控制等。在上述提到的这些方法中,滑模变结构控制因具有强鲁棒性和容易实现等优势而受到更多关注。然而,由于滑模控制律的不连续控制作用会引起抖振现象,从而限制了滑模控制在实际系统中的应用。
为了削弱抖振现象,提出了另一种有效的方法,即设计基于指数趋近律的滑模控制反馈部分和基于扩张状态观测器的干扰估计与补偿部分组成的复合控制器,使其具有结构简单,抗干扰性能强,跟踪能力好等优点,因而可以显著提高位置伺服系统的控制性能。
发明内容
本发明旨在解决以上现有技术的问题。提出了一种可以达到良好动态和稳态性能,同时可以有效提高系统跟踪能力的基于指数趋近律的基于复合位置控制器的永磁无刷直流电机位置伺服系统及方法。本发明的技术方案如下:
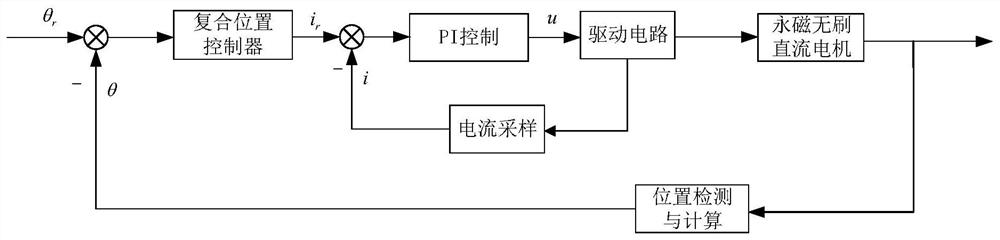
一种基于复合位置控制器的永磁无刷直流电机位置伺服系统,其包括:复合位置控制器模块、PI控制模块、驱动电路模块、电流采样模块、永磁无刷直流电机及位置检测与计算模块,所述复合位置控制器模块与PI控制模块相连接,所述PI控制模块与驱动电路模块相连接,所述电流采样模块并联设置在PI控制模块与驱动电路模块的两端,驱动电路模块还与永磁无刷直流电机相连接,所述永磁无刷直流电机与位置检测与计算模块的一端相连接,位置检测与计算模块的另一端与复合位置控制器模块相连接;
其中,所述复合位置控制器模块是由基于指数趋近律的滑模反馈控制和基于扩张状态观测器的前馈控制复合而成,所述位置检测与计算模块用于检测安装于永磁无刷直流电机上的位置传感器信号θ;电流采样模块得到PI控制模块所需的实际电流i;复合位置控制器模块的输入端为位置参考值θ
进一步的,所述复合位置控制器由基于指数趋近律的滑模反馈控制和基于扩张状态观测器的前馈控制复合而成,复合位置控制器的设计步骤如下所述:
定义位置误差e为:
e=θ
其中θ
对e求导可得:
滑模面设计为:
对s求导后可得:
复合位置控制器设计为:
其中a=k
令e
把复合位置控制器表达式代入
取李雅普诺夫函数为:
由此可知当增益满足k>k
进一步的,所述扩张状态观测器的表达式为:
其中p
进一步的,所述永磁无刷直流电机的数学模型为:
其中θ,w,i,u分别为位置信号,转速信号,电机定子电流和电压;J为转动惯量;B为粘滞摩擦系数;L为定子电感;R为定子电阻;
通常,为了便于对永磁无刷直流电机设计复合位置控制器,可将其表述为如下形式:
其中,a=k
进一步的,系统的控制包括以下步骤:
1)位置检测与计算模块得到电机转子位置θ;
2)检测母线电流得到PI控制模块所需的实际电流i;
3)复合位置控制器模块的输入端为位置参考值θ
4)步骤3)得到的参考电流i
5)电压u在驱动电路控制下,驱动永磁无刷直流电机运行。
本发明的优点及有益效果如下:
1、在复合位置控制器中加入了扩张状态观测器,能够较好的估计扰动进行前馈补偿以此减小抖振现象。
2、基于指数趋近律
3、相比于传统方法,采用基于指数趋近律的滑模控制方法,通过选择恰当的趋近律参数,可以消除稳态误差,减小系统超调,缩短过渡过程时间,改善系统的动态品质,还能有效解决滑模控制中的高频抖动问题。
附图说明
图1是本发明提供优选实施例控制系统原理简图;
图2是本发明的控制系统详细原理框图;
图3是本发明的复合位置控制器原理框图;
图4是PI控制方式下的系统位置曲线;
图5是推荐控制方式下的系统位置曲线;
图6是PI控制方式下的系统电流曲线;
图7是推荐控制方式下的系统电流曲线;
图8是两种控制方式下的系统电压曲线;
图9是本发明推荐控制方式下观测器的输出曲线;
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、详细地描述。所描述的实施例仅仅是本发明的一部分实施例。
本发明解决上述技术问题的技术方案是:
本发明所述永磁无刷直流电机的数学模型为:
其中θ,w,i,u分别为位置信号,转速信号,电机定子电流和电压;J为转动惯量;B为粘滞摩擦系数;L为定子电感;R为定子电阻;
通常,为了便于对永磁无刷直流电机设计复合位置控制器,可将其表述为如下形式:
其中,a=k
其中,所述复合位置控制器模块是由基于指数趋近律的滑模反馈控制和基于扩张状态观测器的前馈控制复合而成,所述位置检测与计算模块用于检测安装于永磁无刷直流电机上的位置传感器信号θ;电流采样模块得到PI控制模块所需的实际电流i;复合位置控制器模块的输入端为位置参考值θ
附图1是本发明的控制系统原理简图,附图2是本发明的控制系统详细原理框图,根据这两个附图,易知,
本实施例包括以下几个步骤:
1)位置检测与计算模块得到电机转子位置θ;
2)检测母线电流得到PI控制模块所需的实际电流i;
3)复合位置控制器模块的输入端为位置参考值θ
4)步骤3)得到的参考电流i
5)电压u在驱动电路控制下,驱动永磁无刷直流电机运行。
根据附图3可知,本发明所述复合位置控制器由基于指数趋近律的滑模反馈控制和基于扩张状态观测器的前馈控制复合而成;位置复合位置控制器的表达式为:
其中a=k
本发明中,所述扩张状态观测器的表达式为:
其中p
如附图4,附图5所示,将本发明(一种基于扩张状态观测器和滑模控制的永磁无刷直流电机位置伺服系统控制方法),与传统控制方法(PI控制)进行对比,可知本发明的控制方法在永磁无刷直流电机位置伺服系统启动后,能更精确追踪输入信号,调节时间短;当t=5s时施加恒定负载,该系统在负载扰动的情况下迅速恢复到稳态值,调节时间极短。
如附图6所示,为PI控制方式下的系统实际电流与参考电流曲线。
如附图7所示,为本发明推荐方式下的系统实际电流与参考电流曲线。
如图8所示,为两种控制方式下的系统电压曲线。
如附图9所示,为本发明推荐控制方式下的观测器输出曲线。图9(a)中所示曲线分别为θ及其估计z
上述实施例阐明的系统、装置、模块或单元,具体可以由计算机芯片或实体实现,或者由具有某种功能的产品来实现。一种典型的实现设备为计算机。具体的,计算机例如可以为个人计算机、膝上型计算机、蜂窝电话、相机电话、智能电话、个人数字助理、媒体播放器、导航设备、电子邮件设备、游戏控制台、平板计算机、可穿戴设备或者这些设备中的任何设备的组合。
计算机可读介质包括永久性和非永久性、可移动和非可移动媒体可以由任何方法或技术来实现信息存储。信息可以是计算机可读指令、数据结构、程序的模块或其他数据。计算机的存储介质的例子包括,但不限于相变内存(PRAM)、静态随机存取存储器(SRAM)、动态随机存取存储器(DRAM)、其他类型的随机存取存储器(RAM)、只读存储器(ROM)、电可擦除可编程只读存储器(EEPROM)、快闪记忆体或其他内存技术、只读光盘只读存储器(CD-ROM)、数字多功能光盘(DVD)或其他光学存储、磁盒式磁带,磁带磁磁盘存储或其他磁性存储设备或任何其他非传输介质,可用于存储可以被计算设备访问的信息。按照本文中的界定,计算机可读介质不包括暂存电脑可读媒体(transitory media),如调制的数据信号和载波。
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个……”限定的要素,并不排除在包括所述要素的过程、方法、商品或者设备中还存在另外的相同要素。
以上这些实施例应理解为仅用于说明本发明而不用于限制本发明的保护范围。在阅读了本发明的记载的内容之后,技术人员可以对本发明作各种改动或修改,这些等效变化和修饰同样落入本发明权利要求所限定的范围。
- 基于复合位置控制器的永磁无刷直流电机位置伺服系统
- 一种基于网络通讯模块化的阀门位置控制器