一种差动减速装置和行星差动减速机
文献发布时间:2023-06-19 10:27:30
技术领域
本发明涉及机械传动领域及机电一体化领域,尤其是涉及减速机、机器人、仿生机器人领域。
背景技术
现有已公开的技术中,最简单和常见的增、减速传动装置是利用齿轮、链轮、同步带轮或带轮等等利用传动件之间的传动比来实现等速或增、减速传动的。复杂些的行星减速机、蜗轮蜗杆减速机、谐波减速机、少齿差减速机、摆线针轮减速机和RV减速机等在不同程度上解决了传动比、传动刚性、传动精度与体积、重量之间的矛盾,其中行星减速机的传动比与体积、重量之间的矛盾还是比较大;蜗轮蜗杆减速机的效率低、精度低、磨损大;谐波减速机的传动刚性较差并且寿命短;少齿差减速机、摆线针轮减速机和RV减速机都需要把部分传动件装于曲轴上运行,其结构形式又产生了一些新的矛盾:比如在现有技术中较先进的RV减速机亦有着轴承受力大和轴承尺寸受到限制的矛盾,使其转速与传动功率受到限制,并且制造要求和制造成本高。在公开号为CN111637199A的中国专利申请中公开的一种行星差动减速机构及减速机,其发明目的在于传动比超过在该专利申请之时的现有技术的行星齿轮减速机,同时其所公开的技术也确实未能达到可以超过现有技术的谐波减速机和RV减速机的效果。在公开号为CN11677819A中国专利申请中公开的技术在一定程度上进一步地解决了传动比与体积的矛盾,但在同等的应用条件下,其结构仍然较复杂或传动效率较低。公开号为CN112013094A的中国专利申请部分地解决了公开号为CN109268452A、CN111005987A、CN111022588A等申请中公开的与其类似的差动式减速机的振动问题,但这类发明申请的技术方案中存在着的需要偏心轴承承受2倍于同样输出力矩的摆线针轮减速机或少齿差减速机上的偏心轴承所承受的作用力的问题和这种减速装置中的的其它轴承更是要额外地承受相等于上述这种作用力的问题并未得到解决。
发明内容
本发明的目的是为了进一步全面或部分地解决现有技术的传动装置在传动功率、传动比、传动刚性、传动精度、传动效率、使用寿命与体积、重量、简单性、可靠性、易制造性、制造成本之间的矛盾,提出一种差动减速装置和行星差动减速机。
本发明的另一个目的是提出一种差动减速装置和行星差动减速机,使机器人、仿生机器人、各种控制方式下的执行装置、人工智能的执行装置、人体外骨骼装置等机器的成本降低、易于制造以及轻便高效;结合5G技术和自有控制系统后能在性能优于现有技术的机器、设备的同时成本更低、更有利于产业升级。
本发明的另一个目的是提出一种能使各种需要进行力的变换的工具、器械和多用途工具、器械等更合适于使用、运输的传动装置。
用来实现本发明目的的减速装置和行星差动减速机的主要构成是:
至少有1个传动件A;至少有一个传动件B;至少有一个传动件C;传动件B和C并列;传动件A与传动件B和C都形成传动关系;A与B之间的传动比不等于A与C之间的传动比。
当把传动件B或C中之一并列在传动件B或C中之另一传动件两边,则传动件B和C作用于传动件A的作用力或反作用力在轴向上被平衡,同时使一些传动件A的传动过程是行星运动的减速装置中免于使用行星架、行星轴、行星轴的轴承等。
在一些传动件A的传动过程是行星运动的减速装置中,设置滚轮和滚道可以使减速装置集成轴承的功能。
减速装置可以把传动件B和C因传动件A的转动而引起的相对的机械运动都对外输出,也可以把传动件B、C之一比如C固定在相对于参考系静止的物体上,传动件B输出相对于参考系的机械运动。
在同样的传动件A的运动速度之下,传动件A和B之间的传动比与传动件A和C之间的传动比的差别越小,传动件B和C之间的相对运动速度就越低,也就是传动比越大。
在本发明的行星差动减速机中:传动件A是行星轮,行星轮同时与至少各有一个的同轴心线并列的传动轮B和C啮合并且行星轮与传动轮B的传动比不同于行星轮与传动轮C的传动比;当行星轮运转时,传动轮B和C之间就会因各自与行星轮具有不同的传动比而产生相对转动;在同样的行星轮的运转速度下,传动轮B和行星轮之间的传动比相较传动轮C和行星轮之间的传动比的差别越小,传动轮B和C之间的相对转速就越低,或者说减速比就越高;在行星轮与传动件B之间、行星轮与传动件C之间都是渐开线齿廓的齿轮传动时,为了在传动件B与C的齿数尽量少的情况下获得需要的传动比并使行星轮上各自正确与传动件B和C啮合的传动轮的轴心线重合,至少传动件A、B、C中之一有变位齿轮或B齿轮的模数与C齿轮的模数不相同并且至少A、B、C中之一有变位齿轮。如果要平衡行星轮公转时的离心力和使太阳轮在径向上受到的力平衡,行星轮应当至少有2个并且在公转圆周上等距或对称分布。如果需要的是相对于参考系的动力输出,那么只要把传动轮B、C之一比如B固定在相对于参考系静止的物体上比如外壳或机座上,行星轮转动时,传动轮C相对于参考系的运动实际上就是传动轮C和B之间的相对运动。这种行星差动减速机的实施方案中,可以由作用于行星轮轴上的动力驱动行星轮,比如动力通过行星轮架驱动行星轮,也可以直接或间接由太阳轴上的太阳轮驱动行星轮。可以使太阳轮、行星轮为适当的空心结构,利用因此而具有的适当的刚度来为各传动轮之间预设的过盈提供弹性退让,消除各个传动件之间的齿隙而提高传动精度;同时也可以利用行星轮的空心部分作为容纳润滑剂的空间,润滑剂通过小孔、微孔或其它方式缓施于传动齿面。上述所谓“适当的空心结构”是指能提供满足传动要求的径向刚度和轴向刚度的形状,比如使行星轮的内壁分布有沟槽就能够通过以不同的槽宽和槽深来调节径向和轴向上各自的刚度大小;进一步还可通过设置沟槽起点和终点、沟槽路径是否经过传动齿的齿根所紧邻的内壁或沟槽经过的路径与齿根所紧邻的内壁的最小距离、每个传动齿所邻内壁的沟槽数量、沟槽的形状和沟槽的路径形状等来获得更理想的力学和机械性能。还可以使传动件A上与传动件B啮合的传动轮和与传动件C啮合的传动轮之间在各自正常啮合传动时的相对角度的中间值的基础上以共同的轴心线为轴心相对地偏转一个角度,相邻传动件A上与传动件B啮合的传动轮和与传动件C啮合的传动轮之间则在各自正常啮合传动时的相对角度的中间值的基础上以共同的轴心线为轴心并以相反于与之相邻的传动件A之上的传动轮的这种偏转的方向相对地偏转一个角度以消除传动背隙;各个传动件A上的这种偏转角度的大小以能消除传动背隙为度。
减速传动时,传动轮B或C因输出动力而受到的反作用力中只有较少的等于传动比的倒数的反作用力成为驱动行星轮运动的作用力的反作用力,其余反作用力都由行星轮在传动轮B和C之间传递而相抵。
实施本发明的装置中如果具有太阳轮传动于行星轮的结构,在可选择的情况下,取较大的行星轮相对于太阳轮的减速比而减少行星轮与传动件B、C之间的相对速度可以提高传动效率。
有益效果
应用本发明的减速机在与现有技术的减速机同体积时,具有更大的传动功率、更大的传动比范围和更简单的结构。以图11、12所示的实施例9为例,当太阳轮是17齿的正齿轮、行星轮上与传动件B啮合的部分和与传动件C啮合的部分都是17齿的正齿轮、传动件83是50齿的径向正变位内齿轮、传动件84和85都是51齿的正内齿轮时,可知该减速机的传动速比就是200倍;当传动件83是103齿的径向负变位内齿轮、传动件84和85是102齿的径向正变位内齿轮、太阳轮是17齿的径向正变位齿轮、行星轮上都是43齿的径向负变位齿轮时,可知该减速机的传动速比是721倍。
在行星轮上设置有仅与太阳轴上的太阳轮啮合的传动轮的实施方式中,当传动件B是100齿的内齿轮、传动件C是103齿的内齿轮、行星轮上与传动件C啮合的是34齿的齿轮、行星轮上与传动件B啮合的是33齿的齿轮、行星轮上和太阳轴上的用以使行星轮和太阳轴之间形成传动关系的齿轮分别是50齿和20齿并且它们的模数小于传动件B和C上的齿轮的模数、传动件C固定于参考系、由传动件B对外输出时,该减速机的传动速比为23800倍。上述各齿轮以径向变位齿轮的方式完全可以凑配出合适的中心距和间距。
在传动件B和C都是不到30齿的针齿轮的实施方式中也能轻易达到上千倍的传动比。
在传动件B和C交错并列的实施方案中,行星架、行星轴以及行星轴上的轴承等都已不需要,同时图12、13、图16-图20所示的3个实施方式可正常工作在远高于谐波减速机和RV减速机所能承受的转速下,其中在图16-图20所示的2个实施例更为优化,进一步全面免用了在现有技术的减速机中占很大成本比重并且制约了减速机性能的轴承。利用本发明的减速装置所具有的宽传动比范围和可以承受高转速的优点,同功率下电机的重量和体积能够减小50%以上。
附图说明
图1为用齿轮来实施本发明的示意图。
图2为用齿轮和内齿轮来实施本发明的示意图。
图3为用锥齿轮来实施本发明的示意图。
图4为用带轮来实施本发明的示意图。
图5为用针齿轮来实施本发明的示意图。
图6为实施本发明在滚动和直线运动之间传动的示意图。
图7为类似行星减速机的本发明的实施示意图。
图8为用针齿轮的类似行星减速机的本发明的实施示意图。
图9为图7所示的实施方式的爆炸示意图。
图10为图8所示的实施方式的爆炸示意图。
图11为传动件B与C交错并列的类似行星减速机的本发明的实施示意图。
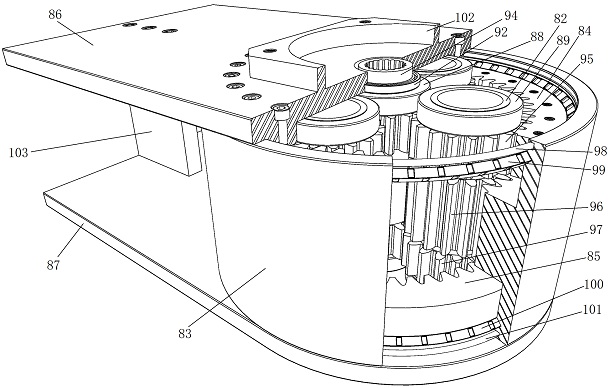
图12在图11的基础上增加承受离心力与径向分力构件的本发明的实施示意图。
图13为图12所示的实施方式的爆炸示意图。
图14为结构更简化的本发明的实施示意图。
图15为基于图14所示的实施方案的实施示意图。
图16为全面免用轴承的本发明实施方式的单边开盖示意图。
图17为全面免用轴承的本发明实施方式中的滚轮、滚道配合的示意图。
图18为全面免用轴承的本发明实施方式中的太阳轴、行星轮(传动件A)结构示意图。
图19为全面免用轴承的本发明实施方式中的针齿、滚道示意图。
图20为用穿过空心的太阳轴心部的连接杆连接同轴并列于另一个传动件两边的传动件的本发明实施方式示意图。
具体实施方式
实施例1-6
图1至图6用精简的形式来分别图示了6种本发明的实施方式。1、4、7、10、14、79是与传动件B和C都具有传动关系的传动件A,如果把2、5、8、11、15、81称为传动件B,那么3、6、9、12、16、80就是传动件C;这里除了图6的实施方式中的传动件A是沿直线滚动的,其余都是可以以传动件B和C的轴心线为公转中心做行星运动的。运用现有技术的机械和减速机知识以及参照本说明书就完全可以把图示各种实施方式和其所引申出的更多种实施方式进行具体实现;比如根据图4所示的用到平带13、带轮10、11、12的实施方式可以联想到用同步带轮、链轮等的实施方式;可以引申出摩擦轮传动的实施方式;可以引申出利用柔性传动轮在外力下能改变实际传动半径的特点来达成无级变速的实施方式;比如根据图5所示的用到针齿圈15、16的实施方式,可以把针齿销17改为与RV减速机类似地镶嵌于针齿圈而省去针齿销套18的实施方式;根据图6所示传动件A沿直线滚动的的实施方式可以联想到传动件A沿曲线滚动、传动件B和C是弧形的实施方式等等。
实施例7
图7和图9为一个类似行星减速机结构的本发明的实施方式。此实施方式有4个传动件A即4个行星齿轮19,这4个行星齿轮同时与内齿轮20、21具有传动关系,内齿轮20固定连接于机壳28,如果把内齿轮20称为传动件B,那么内齿轮21就是传动件C;行星轮、内齿轮20或内齿轮21可以做成变位齿轮以使行星轮上与内齿轮20啮合的部分39和与内齿轮21啮合的部分38在同轴心的同时可以与内齿轮20、21分别具有不同传动比的传动关系。行星轮和行星轴30之间是滚针轴承27,行星轴装于行星架35上,行星轴两端有弹簧挡圈29。行星架通过轴承24、31连接太阳轴33,太阳轴一端通过轴承32连接机壳,另一端通过轴承25连接动力输出法兰盘26。用螺栓把动力输出法兰盘和内齿轮21连接在一起时输出法兰盘上的倒角与内齿轮21上的倒角40形成交叉滚子轴承的外滚道,动力输出法兰盘26和内齿轮21通过在机壳上的内滚道与该外滚道之间的交叉滚子轴承22连接机壳。23是油封圈,37是在机壳上的可以用来安装此减速机的法兰。34是在机壳上的安装电机的法兰,作用于太阳轴的动力通过太阳轮36传递至行星轮。
实施例8
图8和图10为一个用针齿轮的类似行星减速机结构的本发明的实施方式。此实施方式有4个传动件A即4个行星轮42,这4个行星轮同时与由针齿销58、针齿销套59直接装在机壳43而形成的针齿轮和针齿轮44具有传动关系,如果把直接与机壳形成的针齿轮称为传动件B,那么针齿轮44就是传动件C。行星轮上具有与机壳上的针齿轮啮合的部分46、与针齿轮44啮合的部分47、与太阳轴73上的齿轮53啮合的部分45。行星轮和行星轴70之间是滚针轴承69,行星轴固定于行星架71上。行星架通过轴承57、55连接太阳轴,太阳轴一端通过轴承56连接机壳,另一端通过轴承54连接动力输出法兰盘50。用螺栓把动力输出法兰盘和针齿轮44连接在一起时输出法兰盘上的倒角52与针齿轮44上的倒角51形成交叉滚子轴承的外滚道,动力输出法兰盘和针齿轮44通过在机壳上的内滚道与该外滚道之间的交叉滚子轴承49连接机壳。图中60和61是针齿轮44上的针齿销和针齿销套,74是轴承垫圈,48是油封圈,72是在机壳上的安装电机的法兰。
实施例9-10
图11为一个把传动件B和C交错并列的本发明的实施方式。如果把传动件83称为传动件B,那么固定于机座板86和87的内齿轮84与85就是传动件C,传动件C对称并与传动件B同轴地并列在传动件B两边,4个行星轮82上都相应地具有可以分别与传动件84、83、85啮合的3个部分95、96、97。这种交错结构使得作用在行星轮两端的力与作用在行星轮中间的力平衡,这时行星架和行星轴都不再需要。包括图12、13所示的实施方式,传动件83的外圆可以根据需要直接做成或装上链轮、齿轮、卷筒、轧辊等等;如果机座板86、87改为直接是机器人的机械臂或连接于机器人的机械臂,并且传动件83连接在相对于该机械臂的另一节机械臂,那么就成为机器人的关节。
图12、13的实施方式是在图11的基础上增加了在太阳轮上的滚轮88、行星轮上的滚轮89以及做在机架板86、87上的供行星轮上的滚轮滚动的内滚道。这种实施方式可以利用滚轮和滚道来承受齿轮啮合时的径向分力以及行星轮高速公转时的离心力。行星轮和太阳轮上可以根据需要设置多个滚轮,可以与其轮上的传动齿轮交错排列,机架板、传动件83上对应行星轮上的滚轮的位置处都可设置内滚道;滚轮和滚道的滚动面还可以做成互相配合的凹形滚道和凸形滚道或者类似于角接触轴承的L形、倒L形滚道,以保证行星轮、太阳轴的轴向位置正确。太阳轴94通过轴承92、93连接到机座板86、87,作用于太阳轴的动力通过太阳轮104、105传动到行星轮。传动件83通过交叉滚子轴承99、100连接到机座板86、87,98与101都是油封圈,102是可以安装电机的法兰,连接板103把机座板86、87连接成一体。
实施例11-12
图14所示的实施方式在图11所示的实施方式上省去了交叉滚子轴承、油封圈和太阳轴上的滚动轴承,可在对精度和传动速度要求不高的情况下应用,优点是成本更低、结构更简单。只要装上或做上相应的部件比如各种压制模具、剪切头、撬头、卷筒等等,利用转动太阳轴201造成的传动件200相对于机架板108、109的转动就可完成压、钳、剪、绞盘等等各种相应的功能。比如如图15所示的实施方式加上支撑脚就至少可以起到千斤顶的作用,并且其顶升或支撑方式更多且更灵活。
实施例13
图16、17、18、19所示的实施方式全面免用了轴承,或者说这种实施方式中的滚轮和滚道使减速机集成了轴承的功能。205是起到密封作用的防尘盖,204是电机法兰,209是机座。行星轮206是传动件A,如果把208称为传动件B,那么并列在208两边的207就是传动件C,传动件C直接做在机座209上。240是传动件208的针齿,241是传动件207的针齿。同步带轮210、齿轮211、滚轮222做成一体并且在内孔制有螺纹,以螺母的形式安装在太阳轴213上,以方便调节滚道横截面为L形或倒L形的滚轮222和232与传动件A上的滚轮221、231的轴向配合间隙而使太阳轴处于正确的位置等,紧固件214上有外螺纹,旋进上述的螺母中使螺母锁紧在太阳轴上。装在太阳轴上的齿轮211和装在传动件A上的齿轮212啮合。216是把滚轮231锁紧在传动件A上的锁紧螺钉的螺纹孔。215是把齿轮212锁紧在传动件A上的锁紧螺钉的螺纹孔,锁紧了212也就同时把滚轮221定位在传动件A上。224、226、228、234分别是滚轮225、227、229、235的凹形内滚道,可视为相当于轴承的外圈。太阳轴上的滚轮222、232分别与滚轮221、231接触滚动,滚轮222、232可视为相当于轴承的内圈。滚轮221、231没有内滚道。
实施例14
图20是一种用穿过空心太阳轴233的心部而不与太阳轴接触的连接杆238把同轴并列于传动件247两边的传动件245和246连接到一起的本发明的实施方式。如果把传动件247称为传动件B,那么传动件245、246就是传动件C。图中未图示出行星轮,行星轮及行星轮与太阳轴、滚道的配合和实施例13中的相同。 太阳轴233除了把实施例13中的同步带轮210替换为本实施例的齿轮240和在相对于齿轮240这端的另一端进行缩短之外,其它与实施例13中的太阳轴213相同。传动件246与端盖248通过螺栓连接固定,连接杆238和端盖248是一体的,并与端盖241连接,用螺母237锁紧。236是防止连接杆238与端盖241产生相对转动的销子。在端盖241上的239是安装电动机的法兰。与传动件247一体的243是减速机的输出法兰。与传动件245一体的242是用来固定减速机的机座法兰,端盖241通过螺栓与减速机的机座法兰242连接。传动件245与机座法兰之间的槽孔244用来使传动件246和245相对于机座法兰的刚度能互相配合,槽孔的形状、数量根据减速机所用材质的弹性模量和相关形状、尺寸等来确定,槽孔可以采用其它形状比如波浪形等等。本实施例解决了类似实施例9、10、13的传动件B和C交错并列的实施方式在某些应用中输出端的旋转角度受限的问题。
如果实施例14中的齿轮240替换为电机的转子,把电动机集成在减速机中,则又会成为一个新的实施例。
实施例8(图8、图10)和实施例13、14(图16-图20)中传动件A上设置有仅与太阳轴上的传动轮啮合的传动部分,其它实施方式也可采用这种形式,可以满足仅简单变换太阳轴上的传动轮和行星轮上与太阳轴上的传动轮啮合的传动轮就能改变减速比的应用需求,以及方便细化减速机传动比分档。
本申请所说的“太阳轴”是指设置于传动件A的公转中心轴心线上的传动轴,与行星减速机里的太阳轴类似,有些文件里也称之为“中心轴”。本申请所说的“太阳轮”是指设置在太阳轴上的用于使行星轮与太阳轴形成传动关系的传动轮,其齿轮种类根据应用需要选择,比如选择下限齿数更少的齿轮种类以达成更大的减速比。本申请文件内所提及的“行星轮”都是其相应实施例中的传动件A。以滚齿加工方法来说明:本申请所说的变位齿轮的“径向正变位”是指刀具向远离齿轮中心的方向变位,反之则称为为“径向负变位”。
熟知机械加工与处理、机电一体化、减速机、机器人等领域的现有技术的普通技术人员应用本申请文件所公开的技术方法已经足以实现本发明的目的,所以在此次申请中无需公开热处理方法、表面处理方法、减摩方法、加工方法、误差补偿方法等等。
本发明的应用面很广,可以引申出很多实施本发明的方式和运用各种现有技术实施本发明:比如输入和输出反过来用就可以作为增速机;比如设置多组传动比不同的传动件C并且设置有可以选择使其中哪一组传动件C相对于参考系静止的装置的传动装置就能够实现变速及变向传动;再比如图7-图10所示的2个实施例也可设置滚轮和滚道;比如不同的齿廓或以不同的曲线方程得出的不同的齿廓的齿轮比如摆线齿廓、类摆线齿廓、次摆线齿廓、类渐开线齿廓、圆弧齿廓等齿廓的齿轮以及磁轮、摩擦轮、柔轮等在本发明的应用等等,本申请应该不必一一列举。本申请提出的权利要求并未全部包括本申请文件所公开的发明内容,因为本申请请求获得保护的主要目的不在于垄断,而在于不被他人利用这些发明点获得的专利提高应用本发明的成本或阻碍本发明的应用。本申请所述并非是对本申请请求保护的范围作任何的限制,熟知机电一体化邻域及减速机、机器人等相关领域的技术人员进行简单变通或不需要创造性劳动就能够对本申请文件所公开的技术内容作出的改变与应用皆在本申请请求保护的范围或本申请之后的现有技术的范围内。
- 一种差动减速装置和行星差动减速机
- 一种桥式起重机用差动行星减速装置