一种水面捕捞机器人及使用方法
文献发布时间:2023-06-19 10:29:05
本申请是申请日为2019年8月22日,申请号为CN201910780633.1的发明名称为一种水面捕捞机器人的分案申请。
技术领域
本发明涉及机器人领域,尤其是涉及到一种水面捕捞机器人及使用方法。
背景技术
水面捕捞机器人主要用在景区、城市内河等一些平静的狭长水域工作,用来捞取水上垃圾,浮在水体表面的垃圾主要有塑料瓶、藻类植物以及各种塑料垃圾袋,在捕捞塑料瓶的时候,容易发生以下问题:第一,塑料瓶中含有河流水,若收集过多,容易导致机器人在水体表面失去平衡,发生倾斜,半浸在水体中,无法继续捕捞,另一方面,无论采用何种能源作为机器人的推动力,都很容易在收集满了后将已经倒出水的塑料瓶反向推出去,收集效果差。
发明内容
针对现有技术的不足,本发明是通过如下的技术方案来实现:一种水面捕捞机器人及使用方法,其结构包括推进器、风力测量仪、摄像头、主体、反向捞取笼、捕捞网、支撑杆,所述主体顶端面分别设有风力测量仪和摄像头,所述主体侧面两侧分别设有推进器和捕捞网,所述捕捞网两侧分别通过支撑杆和主体机械连接,在主体和捕捞网相连接的位置设有一个反向捞取笼,所述反向捞取笼和捕捞网机械连接。
作为本技术方案的进一步优化,所述反向捞取笼由外层套笼和内网笼组成,所述反向捞取笼直径大于内网笼,所述内网笼位于外层套笼内部,所述外层套笼和内网笼的横截面不完整的环形结构体,上面开有一个弧形口,这个弧形口水塑料瓶的进口,且这个弧形口正对着主体和捕捞网相连接的位置,塑料瓶从弧形口进入后直接落在内网笼底部,内网笼镂空状。
作为本技术方案的进一步优化,所述内网笼由弧形面板和网纱主体组成,网纱主体为环状的类住体结构,所述网纱主体的弧形口一端贴有弧形面板,所述弧形面板内表面光滑无凸起。
作为本技术方案的进一步优化,所述弧形面板内表面上设有两个以上的弧形阻拦块,所述弧形面板和阻拦块垂直固定,这些弧形阻拦块互相平行。
作为本技术方案的进一步优化,两个弧形阻拦块之间的距离由水平两端向中心位置逐渐变大,塑料瓶一般是下宽上窄的结构,靠两端的弧形阻拦块之间的距离小于塑料瓶的最大宽度。
作为本技术方案的进一步优化,每个弧形阻拦块距离内网笼的弧形口距离由水平两端向中心变得越来越大,形成一个V型的结构。
作为本技术方案的进一步优化,所述弧形面板和弧形口相邻的端面上均匀设有两个以上插桩,所述插桩由外拓板、插针、弧形下插件组成,所述插针上设有两块互相平行的外拓板,所述外拓板和插针为模具一体化结构,两个外拓板之间活动安插着弧形下插件。
作为本技术方案的进一步优化,所述弧形下插件内部安装有一个星型套环。
本发明一种水面捕捞机器人及使用方法与现有技术相比具有以下优点:
1.本发明利用外层套笼、内网笼的结构设计所形成的弧形口,一旦塑料瓶从弧形口进入后直接落在内网笼底部,内网笼镂空状,并不能积水,塑料瓶不会再浸在水中,既不会因为水流外冲导致外移,也不会再次进水。
2.本发明通过阻拦块水平排列的密度以及弧形面板表面的光滑度,在塑料瓶从弧形口进入后,塑料瓶要么在内网笼两端反向倒置即瓶口朝下,要么向中心滑动,再倒置,倾倒出塑料瓶中的水,减少其整体重量,避免机器人发生失衡。
3.本发明阻拦块通过尺寸构成的V型排列,更加有利于塑料瓶的倾斜,而后倒出塑料瓶中的水,更进一步地减少塑料瓶的整体重量。
4.本发明弧形面板的侧面还设有插桩,用来拦截被水流带动过来的海藻类植物,避免海藻类植物进入反向捞取笼中造成网孔堵塞,水无法下渗形成积液,还可通过弧形下插件让外拓板外扩,增加藻类植物的收集效果。
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
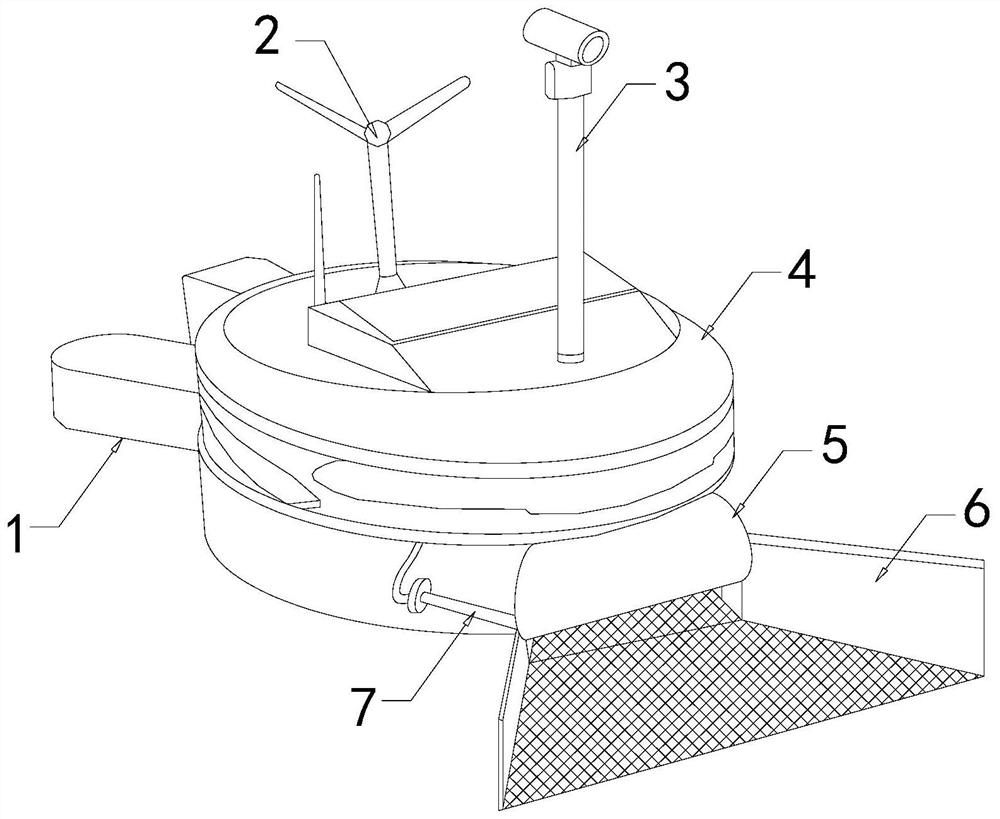
图1为本发明一种水面捕捞机器人及使用方法的立体结构示意图。
图2为本发明反向捞取笼的立体结构示意图。
图3为本发明反向捞取笼的侧视示意图。
图4为本发明反向捞取笼安装时的简易示意图。
图5为本发明插桩未分开时的侧面示意图。
图6为本发明插桩分开时的侧面示意图。
图中:推进器1、风力测量仪2、摄像头3、主体4、反向捞取笼5、捕捞网6、支撑杆7、外层套笼a、内网笼b、弧形面板b1、网纱主体b2、弧形阻拦块d、插桩c、外拓板c1、插针c2、弧形下插件c3。
具体实施方式
为使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式以及附图说明,进一步阐述本发明的优选实施方案。
实施例
请参阅图1-图6,本发明提供一种水面捕捞机器人及使用方法,其结构包括推进器1、风力测量仪2、摄像头3、主体4、反向捞取笼5、捕捞网6、支撑杆7,所述主体4顶端面分别设有风力测量仪2和摄像头3,所述主体4侧面两侧分别设有推进器1和捕捞网6,所述捕捞网6两侧分别通过支撑杆7和主体4机械连接,在主体4和捕捞网6相连接的位置设有一个反向捞取笼5,所述反向捞取笼5和捕捞网6机械连接。
所述反向捞取笼5由外层套笼a和内网笼b组成,所述反向捞取笼5直径大于内网笼b,所述内网笼b位于外层套笼a内部,所述外层套笼a和内网笼b的横截面不完整的环形结构体,上面开有一个弧形口,这个弧形口水塑料瓶的进口,方便塑料瓶的进出,且这个弧形口正对着主体4和捕捞网6相连接的位置,塑料瓶从弧形口进入后直接落在内网笼b底部,内网笼b镂空状,并不能积水。
所述内网笼b由弧形面板b1和网纱主体b2组成,网纱主体b2为环状的类住体结构,所述网纱主体b2的弧形口一端贴有弧形面板b1,所述弧形面板b1内表面光滑无凸起,塑料瓶从弧形口进入与之接触表面光滑,阻力小,易发生相对滑动。
所述弧形面板b1内表面上设有两个以上的弧形阻拦块d,所述弧形面板b1和阻拦块b垂直固定,这些弧形阻拦块d互相平行。
两个弧形阻拦块d之间的距离由水平两端向中心位置逐渐变大,塑料瓶一般是下宽上窄的结构,靠两端的弧形阻拦块d之间的距离小于塑料瓶的最大宽度,在这个位置塑料瓶要么倒置,要么水平向中心倾斜,倒出瓶子中大部分的水,这水指这净河域的水。
每个弧形阻拦块d距离内网笼b的弧形口距离由水平两端向中心变得越来越大,形成一个V型的结构,当塑料瓶发生倾斜的时候,向中心的倾斜的角度,进一步引导塑料瓶倾斜,并倒置地放出里面的水,这水指这净河域的水。
所述弧形面板b1和弧形口相邻的端面上均匀设有两个以上插桩c,所述插桩c由外拓板c1、插针c2、弧形下插件c3组成,所述插针c2上设有两块互相平行的外拓板c1,所述外拓板c1和插针c2为模具一体化结构,两个外拓板c1之间活动安插着弧形下插件c3,采用弧形下插件c3让外拓板c1张开时,增加其与海藻的接触面积,拦截海草,避免其进入反向捞取笼5中,堵塞网孔,导致反向捞取笼5无法向下渗水。
所述弧形下插件c3内部安装有一个星型套环,增强不规则下插件c3支撑力,放置其因为支撑外拓板c1发生变形。
当推进器1推动捕捞网6捞取河流中的塑料瓶时,塑料瓶被推动到主体4和捕捞网6相连接的位置后被水流反向挤出,从弧形口进入后会经过弧形面板b1,若在反向捞取笼5两端进入,因为靠两端的弧形阻拦块d之间的距离小于塑料瓶的最大宽度,在这个位置塑料瓶要么倒置,倾倒出瓶中水后,被下一个进来塑料瓶推动,翻向落入内网笼b底部,要么水平向中心倾斜,倒出瓶子中大部分的水,向中心倾斜时,因为每个弧形阻拦块d距离内网笼b的弧形口距离由水平两端向中心变得越来越大,所形成的一个V型的结构,以及弧形面板b1的表面光滑度,一旦塑料瓶发生倾斜,瓶子中水向瓶口流出,边倾斜边流出,而后从内网笼b的中心位置直接落入内网笼b底部,内网笼b底部为网格镂空状,水流会自动下渗,不会形成积液,另外,随着水流进来的水中藻类植物会被插桩c直接拦截,避免其进入内网笼b造成网格堵死,无法下渗漏水,还可利用弧形下插件c3分开外拓板c1,增大与藻类植物的接触面积,提高藻类植物的拦截效率,作为分叉件的弧形下插件c3中设有星型套环,支撑着外拓板c1,避免其发生变形,从而提高支撑效果。
本发明解决的问题是第一,塑料瓶中含有河流水,若收集过多,容易导致机器人在水体表面失去平衡,发生倾斜,半浸在水体中,无法继续捕捞,另一方面,无论采用何种能源作为机器人的推动力,都很容易在收集满了后将已经倒出水的塑料瓶反向推出去,收集效果差,本发明通过上述部件的互相组合,本发明主要通过外层套笼a、内网笼b、弧形阻拦块d、插桩c等结构的相互配合,不仅防止塑料瓶中的水倾倒而出,保证机器人整体平衡,也不会再因为水流外流,还避免水中藻类植物进入反向捞取笼5中,保证反向捞取笼5能持续渗水。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点,本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神或基本特征的前提下,不仅能够以其他的具体形式实现本发明,还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围,因此本发明要求保护范围由所附的权利要求书及其等同物界定,而不是上述说明限定。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种水面捕捞机器人及使用方法
- 一种水面捕捞机器人