一种混合动力汽车线控驱动与制动协调控制方法
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及混合动力汽车线控驱动与线控制动技术领域,具体涉及一种混合动力汽车线控驱动与制动协调控制方法。
背景技术
目前,传统燃油混合动力汽车的数量的快速增长带来了环境污染、温室效应和能源危机等问题。新能源混合动力汽车有逐步取代传统燃油混合动力汽车的趋势,氢燃料电池系统混合动力汽车因其零排放、无噪声、效率高等优势有很好的发展前景。传统的混合动力汽车驱动和制动技术已经不能满足混合动力汽车对驱动和制动快速响应的技术需求;随着电子技术和控制理论的快速发展,各种底盘控制技术得到了广泛应用,车辆动力学特性及安全性得到了改善和提高。随着混合动力汽车电子技术的不断发展和混合动力汽车系统的集成化,驱动系统正在向无机械支持系统的线控驱动方向发展。现有的传统底盘控制技术因其部件的复杂性、质量重、能耗高和制造成本高等缺点,已经不适用于混合动力汽车;而线控驱动和线控制动技术使混合动力汽车的操纵部件具有灵活性,提高了混合动力汽车设计的自由空间,提高了驱动和制动的响应速度和控制精度,同时也提高了混合动力汽车的安全性降低混合动力汽车能耗。
中国专利文献202010755997.7提出的具有完备失效运行能力的线控制动系统及车辆,该发明能够在线控制动系统中的永磁同步电机失效时,快速切换动力系统,保持制动系统的制动能力。中国专利文献201910474607.6提出一种集成式纯电动混合动力汽车驱动控制器及控制方法,集成了整车控制器与永磁同步电机控制器的功能,响应快,效率提高了,由于不需要在整车控制器与永磁同步电机控制器之间通过CAN总线传递信息,安全性也得到保障。但是,以上专利不能实现对混合动力汽车线控驱动与制动协调控制,同时也不能实现降低混合动力汽车能耗以及提高系统的响应速度和控制精度。
考虑到以上问题,本发明提供了一种混合动力汽车线控驱动与制动协调控制方法。
发明内容
发明要解决的技术问题是:针对现有技术存在的技术问题,提供一种混合动力汽车线控驱动与制动协调控制方法,克服传统底盘控制技术响应速度慢缺点,解决线控制动系统运行时动能回收的问题,提高整个系统的响应速度和安全可靠性,降低系统的反馈误差。
为解决上述技术问题,本发明提出的技术方案为:
本发明实施提供了一种混合动力汽车线控驱动与制动协调控制方法,其特征在于,将混合动力汽车运行状态划分为启动加速、升速、行驶、降速、刹车5种工况,该方法由供电直流电源、双向变换模块和控制系统组成的混合动力汽车线控驱动与制动协调控制一体化装置来实现混合动力汽车运行;动力方式包括锂电池供电、氢燃料电池系统供电、氢燃料电池系统和锂电池混合供电3种,由供电直流电源提供;
该方法步骤如下:
(1)车辆启动上电控制:当钥匙打到ON挡,控制系统唤醒供电直流电源、混合动力汽车线控驱动与制动协调控制一体化装置,无故障后,控制系统发送上电指令并控制完成高压上电,氢燃料电池系统开始启动发电;
(2)控制系统根据实时采集油门踏板和制动踏板的位移信息,确定混合动力汽车运行状态、目标功率和目标行驶速度;
(3)控制系统根据混合动力汽车运行状态,采用动力分配策略确定动力方式;
(4)控制系统根据混合动力汽车运行状态,按自动投切策略切换永磁同步电机的运行模式;
(5)控制系统通过协调控制策略来协调供电直流电源、双向变换模块协同工作,保证混合动力汽车按目标行驶速度行驶;
(6)车辆关闭下电控制:钥匙由ON挡打到OFF挡时,整车进入下电流程,控制系统依然保持供电直流电源,永磁同步电机减速到0,断开永磁同步电机;供电直流电源中的氢燃料电池系统进行降载,当其功率降到0kW后进行扫吹,待氢燃料电池系统关机后,控制系统进入休眠状态,下电完成。
进一步,所述动力分配策略是:
当混合动力汽车运行状态为启动加速工况,目标功率小于等于第一功率阈值时,由锂电池供电;
当混合动力汽车运行状态为升速工况,目标功率大于第一功率阈值且小于第二阈值时,氢燃料电池系统和锂电池混合供电,其中第二功率阈值大于第一功率阈值,第一功率阈值为锂电池额定功率,第二功率阈值为燃料电池额定功率;
当混合动力汽车运行状态为行驶工况,目标功率小于等于第二功率阈值时,氢燃料电池系统供电;当目标功率大于第二功率阈值时,氢燃料电池系统和锂电池混合供电;
混合动力汽车运行状态为降速工况时,氢燃料电池系统供电;
当混合动力汽车运行状态为刹车工况时,断开氢燃料电池系统。
进一步,所述自动投切策略是:
当混合动力汽车运行状态为升速或行驶或启动加速或降速工况时,永磁同步电机切换到电动运行模式;当混合动力汽车运行状态为刹车工况时,永磁同步电机切换到发电运行模式。
进一步,所述协调控制策略是:
当永磁同步电机处于电动运行模式,混合动力汽车运行状态为启动加速工况时,由锂电池供电,其输出功率随加速度的变化呈增加趋势,双向变换模块处于逆变状态,在控制系统提供的PWM波作用下,将供电直流电源输入的直流电转换成幅值和频率可调的交流电,按目标行驶速度驱动混合动力汽车启动加速行驶;
当永磁同步电机处于电动运行模式,混合动力汽车运行状态为升速工况时,氢燃料电池系统和锂电池混合供电,双向变换模块处于逆变状态,在控制系统提供的PWM波作用下,将供电直流电源输入的直流电转换成幅值和频率可调的交流电,按目标行驶速度驱动混合动力汽车快速加速行驶;
当永磁同步电机处于电动运行模式,混合动力汽车运行状态为行驶工况时,当目标功率小于第二功率阈值时,氢燃料电池系统供电,根据SOC值的大小来决定是否由燃料电池系统给锂电池充电;当目标功率等于第二功率阈值时,氢燃料电池系统供电;当目标功率大于第二功率阈值时,氢燃料电池系统和锂电池混合供电;双向变换模块处于逆变状态,在控制系统提供的PWM波作用下,将供电直流电源输入的直流电转换成幅值和频率可调的交流电,驱动混合动力汽车按目标行驶速度行驶;
当永磁同步电机处于电动运行模式,混合动力汽车运行状态为降速工况时,氢燃料电池系统供电,双向变换模块处于逆变状态,在控制系统提供的PWM波作用下,将供电直流电源输入的直流电转换成幅值和频率可调的交流电,驱动混合动力汽车由当前速度减速行驶至目标行驶速度;
当永磁同步电机处于发电运行模式,混合动力汽车运行状态为刹车工况时,将氢燃料电池系统输出功率降到最低,永磁同步电机速度下降为0,混合动力汽车实现刹车,此过程中,锂电池根据SOC值的大小来决定是否进入充电状态;当锂电池进入充电模式时,双向变换模块处于整流状态,在控制系统提供的PWM波作用下,将永磁同步电机发出的交流电转换成直流电给锂电池充电。
本发明针对传统底盘控制技术响应速度慢,制动系统运行时动能回收的问题,发明一种混合动力汽车线控驱动与制动协调控制方法,本发明集混合动力汽车线控驱动与制动协调控制功能于一体,主要有以下的优点:
(1)将混合动力汽车运行状态划分为启动加速、升速、行驶、降速、刹车5种工况,动力方式分为锂电池供电、氢燃料电池系统供电、氢燃料电池系统和锂电池混合供电3种,根据实时采集油门踏板和制动踏板的位移信息,确定混合动力汽车运行状态、目标功率和目标行驶速度;
(2)提出动力分配策略确定动力方式,提出自动投切策略切换永磁同步电机的运行模式;提出协调控制策略,实现混合动力汽车线控驱动与制动的协同控制,提高线控驱动和线控制动能力,缩短响应时间;
(3)实现永磁同步电机发电过程中动能回收,当混合动力汽车处于刹车运行工况时,断开氢燃料电池系统,锂电池根据SOC值的大小来决定是否进入充电状态,当锂电池进入充电模式时,双向变换模块处于整流状态,在控制系统提供的PWM波作用下,将永磁同步电机发出的交流电转换成直流电给锂电池充电,实现刹车运行工况的动能回收,节约了能源。
附图说明
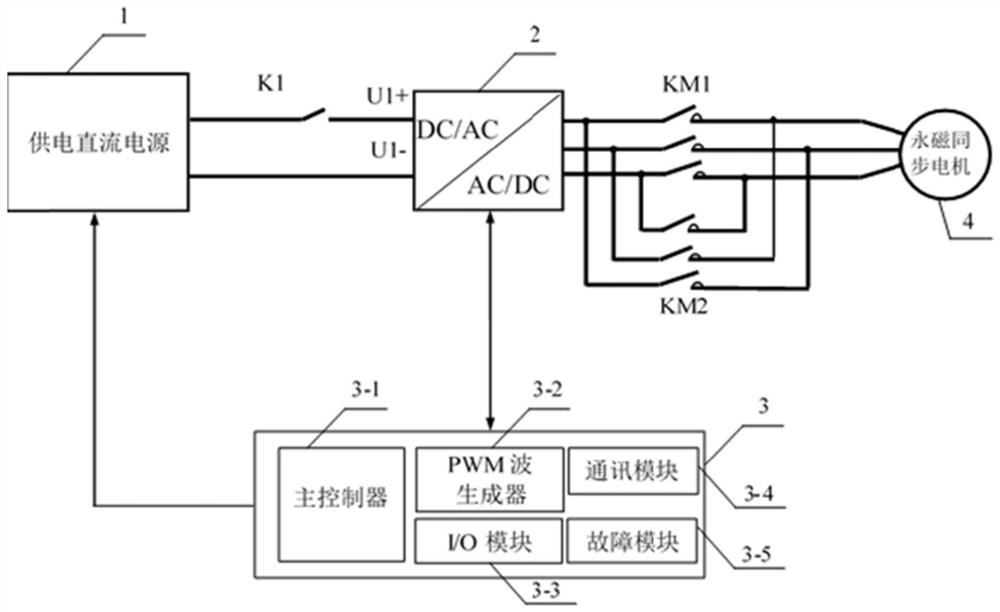
图1为本发明实施例提供的混合动力汽车线控驱动与制动协调控制一体化装置的结构示意图。
附图说明:1.供电直流电源;2.双向变换模块;3.控制系统;4.永磁同步电机;3-1.主控制器;3-2.PWM波生成器;3-3.I/O模块;3-4.通讯模块;3-5.故障模块。
具体实施方式
下面结合实施例及附图对本发明作进一步说明,但不限定本发明。
本发明集“混合动力汽车线控驱动与制动协调控制”功能于一体,实现混合动力汽车线控驱动与制动协同控制,提高线控驱动和线控制动能力,缩短响应时间;同时实现刹车运行工况的动能回收,节约了能源。
本发明实施提供了一种混合动力汽车线控驱动与制动协调控制方法,将混合动力汽车运行状态划分为启动加速、升速、行驶、降速、刹车5种工况,该方法由混合动力汽车线控驱动与制动协调控制一体化装置来实现混合动力汽车运行,混合动力汽车线控驱动与制动协调控制一体化装置包括供电直流电源、双向变换模块和控制系统;动力方式包括锂电池供电、氢燃料电池系统供电、氢燃料电池系统和锂电池混合供电3种,由供电直流电源提供。
本发明提供的混合动力汽车线控驱动与制动协调控制方法,可由混合动力汽车线控驱动与制动协调控制一体化装置实现,该装置的结构如图1所示:包括供电直流电源1、双向变换模块2、控制系统3、开关K1、交流接触器KM1和交流接触器KM2,通过控制系统3的协调控制策略来协调供电直流电源1和双向变换模块2,驱动永磁同步电机4实现混合动力汽车线控驱动与制动的协同控制,提高线控驱动和线控制动能力,缩短响应时间;同时实现刹车运行工况的动能回收,节约了能源。
所述的双向变换模块2由双向DC/AC变换器实现。所述的供电直流电源1包括氢燃料电池、DC/DC变换器和锂电池。
供电直流电源1输出的直流正极端(U+),经开关K1与双向变换模块2的直流正极端(U1+)相连,供电直流电源1输出的直流负极端(U-),直接与双向变换模块2的直流负极端(U1-)相连,双向变换模块的交流输出端分别与交流接触器KM1和交流接触器KM2相连,交流接触器KM1和交流接触器KM2的另一端交错并联后与永磁同步电机4相连。
所述控制系统3包括主控制器3-1、PWM波生成器3-2、I/O模块3-3、通信模块3-4和故障模块3-5。
所述通讯模块3-4,是主控制器和外界联系的工具;故障模块3-5,用于实时探测可能存在的故障;I/O模块3-3处理开关量输入/输出信号,开关K1、交流接触器KM1和交流接触器KM2的通断由所述I/O模块处理实现。
该方法具体如下:
进一步,车辆启动上电控制:当钥匙打到ON挡,控制系统唤醒供电直流电源、混合动力汽车线控驱动与制动协调控制一体化装置,无故障后,控制系统中的主控制器发送上电指令并控制完成高压上电,此时开关K1闭合,交流接触器KM1闭合,氢燃料电池系统开始启动发电;
进一步,控制系统中的主控制器根据实时采集油门踏板和制动踏板的位移信息,确定混合动力汽车运行状态、目标功率和目标行驶速度;
进一步,控制系统根据混合动力汽车运行状态,采用动力分配策略确定动力方式,所述动力分配策略是:
当混合动力汽车运行状态为启动加速工况,目标功率小于等于第一功率阈值时,由锂电池供电;
当混合动力汽车运行状态为升速工况,目标功率大于第一功率阈值且小于第二阈值时,氢燃料电池系统和锂电池混合供电,其中第二功率阈值大于第一功率阈值,第一功率阈值为锂电池额定功率,第二功率阈值为燃料电池额定功率;
当混合动力汽车运行状态为行驶工况,目标功率小于等于第二功率阈值时,氢燃料电池系统供电;当目标功率大于第二功率阈值时,氢燃料电池系统和锂电池混合供电;
混合动力汽车运行状态为降速工况时,氢燃料电池系统供电;
当混合动力汽车运行状态为刹车工况时,断开氢燃料电池系统。
进一步,控制系统中的PWM波生成器根据混合动力汽车运行状态,按自动投切策略切换永磁同步电机的运行模式,自动投切策略是:
当混合动力汽车运行状态为升速或行驶或启动加速或降速工况时,闭合交流接触器KM1,断开交流接触器KM2,此时双向变换模块2处于逆变状态,永磁同步电机切换到电动运行模式;
当混合动力汽车运行状态为刹车工况时,闭合交流接触器KM1,断开交流接触器KM2,此时双向变换模块2处于整流状态,永磁同步电机切换到发电运行模式。
进一步,控制系统通过协调控制策略来协调供电直流电源、双向变换模块协同工作,保证混合动力汽车按目标行驶速度行驶,所述的协调控制策略是:
用标志位S1、标志位S2、标志位S3、标志位S4、标志位S5分别表示混合动力汽车运行的启动加速、升速、行驶、降速、刹车5种工况,有效时其值为1,无效时其值为0,同一时间只能有一种标志位为1,协调控制步骤如下:
步骤1:初始化;
主控制器3-1复位混合动力汽车运行状态标志S1、标志S2、标志S3、标志S4、标志S5。
步骤2:确定有效的标志位;
永磁同步电机切换到电动运行模式:当混合动力汽车运行状态为启动加速运行工况时,置标志位S1为1,其余标志位均为0;当混合动力汽车运行状态为升速运行工况时,置标志位S2位为1,其余标志位均为0;当混合动力汽车运行状态为行驶运行工况时,置标志位S3位为1,其余标志位均为0;当混合动力汽车运行状态为降速运行工况时,置标志位S4位为1,其余标志位均为0;
永磁同步电机切换到发电运行模式:置标志位S5位为1,其余标志位均为0。
步骤3:协调控制;
当S1为1时,主控制器3-1将目标功率信号发送给供电直流电源1,由供电直流电源1中的锂电池供电,按目标功率信号提供需求功率P2;主控制器3-1使用成熟的脉宽调制法控制PWM波生成器3-3产生PWM波信号,其占空比为逐渐增大,控制双向变换模块2处于逆变状态,双向变换模块2控制永磁同步电机,按目标行驶速度驱动混合动力汽车启动加速行驶;
当S2为1时,主控制器3-1将目标功率信号发送给供电直流电源1,由供电直流电源1中的氢燃料电池系统和锂电池混合供电,按目标功率信号提供需求功率P3;主控制器3-1使用成熟的脉宽调制法控制PWM波生成器3-2产生PWM波信号,其占空比为最大,控制双向变换模块2处于逆变状态,双向变换模块2控制永磁同步电机,按目标行驶速度驱动混合动力汽车快速加速行驶;
当S3为1,目标功率小于第二功率阈值时,主控制器3-1将目标功率信号发送给供电直流电源1,由供电直流电源1中的燃料电池系统供电,根据SOC值的大小来决定是否由燃料电池系统给锂电池充电;按目标功率信号提供需求功率P41;主控制器3-1使用成熟的脉宽调制法控制PWM波生成器3-2产生PWM波信号,调节占空比,控制双向变换模块2处于逆变状态,按目标行驶速度驱动混合动力汽车行驶;
当S3为1,目标功率等于第二功率阈值时,主控制器3-1将目标功率信号发送给供电直流电源1,锂电池根据SOC值的大小来决定是否进入充电状态;当锂电池进入充电模式时,由供电直流电源1中的燃料电池系统供电;按目标功率信号提供需求功率P42;主控制器3-1使用成熟的脉宽调制法控制PWM波生成器3-2产生PWM波信号,调节占空比,控制双向变换模块2处于逆变状态,按目标行驶速度驱动混合动力汽车行驶;
当S3为1,目标功率大于第二功率阈值时,主控制器3-1将目标功率信号发送给供电直流电源1,由供电直流电源1中的氢燃料电池系统和锂电池混合供电;按目标功率信号提供需求功率P43;主控制器3-1使用成熟的脉宽调制法控制PWM波生成器3-2产生PWM波信号,调节占空比,控制双向变换模块2处于逆变状态,按目标行驶速度驱动混合动力汽车行驶;
当S4为1,主控制器3-1将目标功率信号发送给供电直流电源1,由供电直流电源1中的氢燃料电池系统供电;按目标功率信号提供需求功率P5;主控制器3-1使用成熟的脉宽调制法控制PWM波生成器3-2产生PWM波信号,占空比逐渐下降,控制双向变换模块2处于逆变状态,驱动混合动力汽车由当前速度减速行驶至目标行驶速度;
当S5为1,将氢燃料电池系统输出功率降到最低,永磁同步电机速度下降为0,混合动力汽车实现刹车,此过程中,锂电池根据SOC值的大小来决定是否进入充电状态;当锂电池进入充电模式时,双向变换模块处于整流状态,在控制系统提供的PWM波作用下,将永磁同步电机发出的交流电转换成直流电给锂电池充电。
进一步,所述的需求功率P2、P3、P41、P42、P43、P5,为不同混合动力汽车运行状态情况下,包含永磁同步电机的需要功率和功率损耗,且均大于目标功率P1。
进一步,车辆关闭下电控制:钥匙由ON挡打到OFF挡时,断开开关K1,断开交流接触器KM1和断开交流接触器KM2,整车进入下电流程,控制系统3依然保持供电直流电源1;供电直流电源1中的氢燃料电池系统进行降载,当其功率降到0kW后进行扫吹,扫吹时间不超过20min,待氢燃料电池系统关机后,控制系统3进入休眠状态,下电完成。
交流接触器KM1断开,交流接触器KM2闭合,可实现永磁同步电机反转。
以上对本发明所提供的一种混合动力汽车线控驱动与制动协调控制方法进行了详细介绍,以上实施说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 一种混合动力汽车线控驱动与制动协调控制方法
- 一种集中驱动式纯线控汽车制动系统及其控制方法