钩针式电感绕线机用绕线装置
文献发布时间:2023-06-19 10:29:05
【技术领域】
本发明涉及钩针式电感绕线机用绕线装置。
【背景技术】
目前的钩针式电感绕线机,大多数是排线机构夹持磁环旋转排线,绕线机构无法多方位移动,当需要对共模电感等需要绕不同线材或分段绕线时,采用流水线操作绕线时,排线机构夹持磁环旋转排线会使整个绕线机更加复杂。
【发明内容】
本发明的目的是解决共模电感流水绕线机的需求,提供一种能够适应被夹持电感而移动绕线的钩针式电感绕线机用绕线装置。
本发明是通过以下技术方案实现的:
钩针式电感绕线机用绕线装置,包括设于机台上的底座,其特征在于所述的底座设有绕线机构、钩针组件驱动所述绕线机构与钩针组件旋转的旋转驱动。优选绕线机构与钩针组件同时旋转,更优选绕线机构与钩针组件共轴旋转。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述的绕线机构包括连接所述旋转驱动输出端的旋转座,所述的旋转座上设有绕线臂和驱动所述绕线臂绕磁环转动的绕线驱动,所述的旋转座上设有驱动所述的绕线臂移动靠近或远离磁环的平移驱动。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述的绕线臂连接所述绕线驱动的输出端,所述的绕线驱动连接所述平移驱动的输出端。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述的绕线臂包括与所述绕线驱动的输出端连接的轴套,所述的轴套内套设有可相对其轴向移动的伸缩轴,所述伸缩轴的一端设有能够与所述轴套相抵夹线的夹头,所述伸缩轴的另一端连接有滚轮。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述的绕线驱动设有曲面环,所述的伸缩轴通过所述滚轮在曲面环高低不同的环面上滚动相对所述的轴套移动。曲面环优选具有两个凸面和两个凹面。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述轴套内设有加速所述伸缩轴复位的弹性件。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述的夹头或/和所述的轴套的相对面设有导向斜面。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述的旋转座上设有位于磁环下方的绕线定位件,所述的绕线定位件具有钩针孔和线槽,所述的钩针孔和线槽相通,所述的绕线定位件上设有绕线感应器。
如上所述的钩针式电感绕线机用绕线装置,其特征在于所述钩针组件包括钩针和驱动所述钩针伸缩的钩针驱动。
与现有技术相比,本发明有如下优点:
本发明的绕线机构、钩针组件可以绕着磁环转动绕线,便于磁环绕多种绕线时流水线作业,提高绕线工序的自动化程度。
本发明中,绕线机构与钩针组件共轴旋转,结构精简,占用体积小,更有利于整个作业流程的自动化优化设计。
【附图说明】
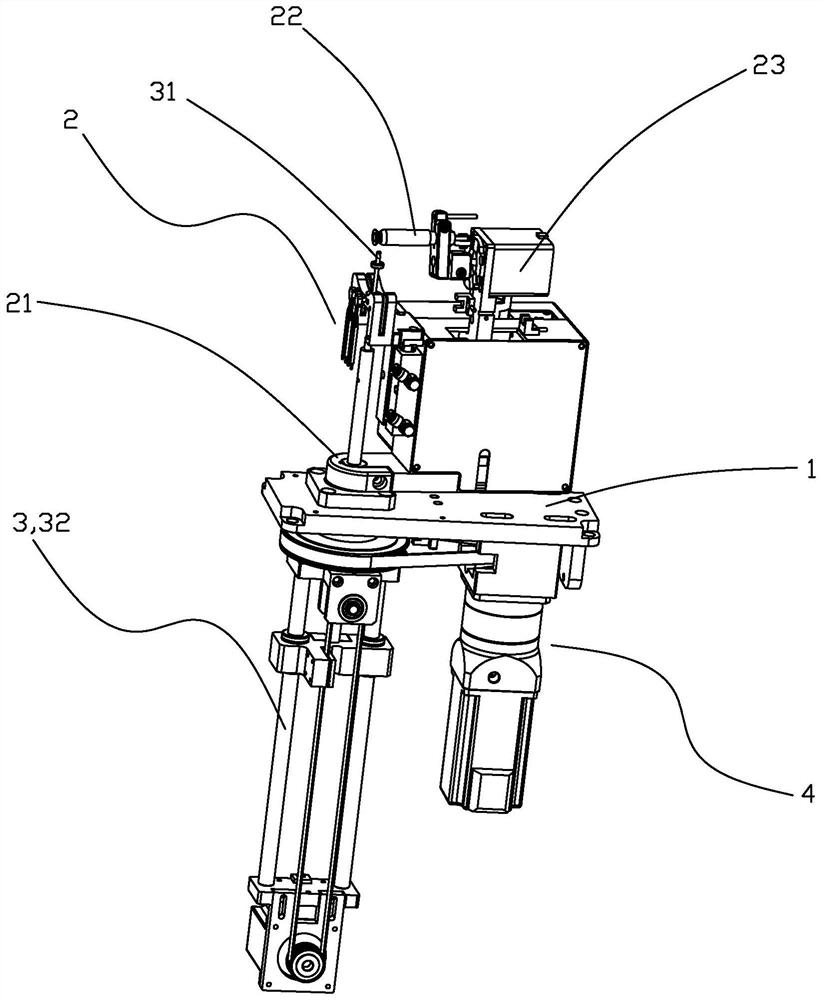
图1为本发明的结构示意图;
图2为本发明绕线机构的结构示意图;
图3为本发明绕线机构的部分结构示意图;
图4为本发明绕线机构的部分结构分解示意图;
图5为本发明的应用状态部分结构示意图。
【具体实施方式】
下面结合具体实施例对本发明作进一步详细说明。
如图1-5所示,钩针式电感绕线机用绕线装置,包括设于机台上的底座1,底座1设有绕线机构2、钩针组件3和驱动绕线机构2与钩针组件3旋转的旋转驱动4。优选绕线机构2设于底座1上方,钩针组件3和旋转驱动4设于底座1下方,钩针组件3包括钩针31和驱动钩针31伸缩的钩针驱动32,钩针31由底座1下方伸出至上方。本发明绕线机构2与钩针组件3可以绕待绕线磁环旋转进行绕线,实现磁环的流水线转动而自动化完成不同线材的绕线。
进一步的,绕线机构2与钩针组件3同时旋转,便于控制系统控制,旋转驱动4可以同时驱动绕线机构2和钩针组件3旋转,也可以包括两个分别驱动绕线机构色2和钩针组件3的旋转驱动。
本发明的一个优选实施例,绕线机构2与钩针组件3共轴旋转,由旋转驱动4驱动,节构更紧凑,节省结构空间,旋转控制也更精准。
优选的,绕线机构2包括连接旋转驱动4输出端的旋转座21,该旋转座21上设有绕线臂22和驱动绕线臂22绕磁环转动的绕线驱动23,绕线机构2还包括驱动绕线臂22移动靠近或远离磁环的平移驱动24,带动绕线臂22和绕线驱动23伸缩,从而实现绕线臂22对穿过磁环中心的线材的让位,实现自动化绕线。更优选地,平移驱动24设于旋转座21,随其一起旋转,可以任一排线位都快速推送绕线臂22绕线。
优选的,绕线臂22连接绕线驱动23的输出端,绕线驱动23连接平移驱动24的输出端。平移驱动24驱动带动绕线驱动23和绕线臂22同时移动。进一步优选地,绕线臂22包括与绕线驱动23的输出端连接的轴套221,轴套221内套设有可相对其轴向移动的伸缩轴222,伸缩轴222的一端设有能够与轴套221相抵夹线的夹头223,伸缩轴222的另一端连接有滚轮224,绕线驱动23设有曲面环25,曲面环25具有高低不同的凸面和凹面,伸缩轴222通过滚轮224在曲面环25高低不同的环面上滚动从而相对轴套221移动,实现夹头223与轴套221端部的开合,对绕线进行夹取或放松。
夹头223与轴套221的端部形成夹线位220,优选在夹头223或/和轴套221的相对面设有导向斜面2231或/和2211,导向斜面2231、2211可以为斜直面或斜曲面,有助于扩大绕材进入夹线位220的进入口,提高夹线的准确度。
更优选地,在轴套221内设有加速伸缩轴222复位的弹性件225,实现夹头223和轴套221的快速关闭。伸缩轴222上设有伸出于轴套221的限位件226,轴套221上设有导向槽227,限位件226在轴套221内轴向移动,从而定位伸缩轴222与轴套221的周向相对位置,避免滚轮224跑偏。
曲面环25优选具有两个凸面和两个凹面,夹头223和轴套221配合夹线翻转时,可以在凹面适当放松线材,避免线材一直被夹紧翻转容易拉断线材。
本发明的一个优选实施例,旋转座21上设有位于磁环下方的绕线定位件26,绕线定位件26具有钩针孔261和线槽262,并且钩针孔261和线槽262相通,钩针31勾线时,穿过底座1和旋转座21,由绕线定位件26的钩针孔261中伸出,穿过磁环中心进行勾线,线槽262对勾下去的绕线进行限位,便于绕线臂22准确夹线绕线,在绕槽262内加设挡杆264,更有利于对绕线的限位夹取。更进一步地,绕线定位件26上设有绕线感应器263,检测到钩针勾空线时报警,防止磁环绕线不合格。绕线感应器263优选为两个,检测更准确。
优选地,绕线臂22通过旋转连接件29连接于绕线驱动23的输出端,绕线驱动23通过连接件28连接平移驱动24的输出端。绕线机构2还包括感应绕线臂22位置和旋转圈数的绕线臂感应器27,便于自动化绕线的控制。
本发明中的各种驱动可以为皮带传动轮式驱动,丝杆驱动、气缸式驱动或其他适宜的驱动。
本发明工作时,控制系统控制旋转驱动4工作,带动绕线机构2与钩针组3旋转至设定位置,送线机构的送线嘴6送线穿过磁环10,平移驱动24工作,推绕线驱动23和送绕线臂22移动,至绕线臂22至磁环10下方,绕线旁边,绕线驱动23带动绕线臂22旋转,使得绕线臂22的伸缩轴222在曲面环25的凸面伸出,夹线位220打开,绕线进入夹线位220,继续旋转,伸缩轴222在曲面环25的凹面回缩,夹头223与轴套221端面相抵,夹线位220关闭,夹紧线材,继续转动至线材翻转至磁环10上方并横置,此时控制系统控制钩针驱动32工作,推动钩针31伸出磁环10并高于线材,然后再驱动钩针31下降,勾住线材穿过磁环10中心向下,完成一次绕线,绕线臂22被平移驱动24带动后退让位下垂的绕线,转动至线材的另一侧,绕线臂22的伸缩轴222再次伸出打开夹线位220准备下一次绕张的夹线,旋转驱动4在绕线过程中驱动绕线机构2和钩针组件3旋转至设定的排线位,完成磁环的设定绕线圈数。
- 钩针式电感绕线机用绕线装置
- 钩针式电感绕线机用绕线装置