一种用于对图像数据进行滤波的方法及系统
文献发布时间:2023-06-19 10:29:05
技术领域
本发明涉及图像处理技术领域,并且更具体地涉及,一种用于对图像数据进行滤波的方法及系统。
背景技术
光学图像是采用光学摄影系统获取的以感光胶片为介质的图像,通常指可见光和部分红外波段传感器获取的影像数据。SAR图像由合成孔径雷达(SAR,Synthetic ApertureRadar)系统产生的图像。SAR系统是一种主动式的对地观测系统,可安装在飞机、卫星、宇宙飞船等飞行平台上,并且能够全天时、全天候对地实施观测、并具有一定的地表穿透能力。
光学图像通常会包含多个波段的灰度信息,以便于识别目标和分类提取。而SAR图像则只记录了一个波段的回波信息,以二进制复数形式记录下来;但基于每个像素的复数数据可变换提取相应的振幅和相位信息。SAR影像分辨率相对较低、信噪比较低,所以SAR影像中所包含的振幅信息远达不到同光学影像的成像水平;但其特有的相位信息是其他传感器所无法获取的,基于相位的干涉建模也是SAR的主要应用方向。
光学影像通常采用中心投影面域成像或推帚式扫描获取数据;而SAR处于信号处理的需要(合成孔径过程,这里就不展开讨论了)不能采用垂直向下的照射方式而只能通过测视主动成像方式发射和接受面域雷达波,并通过信号处理(聚焦、压缩、滤波等)手段后期合成对应于地面目标的复数像元。
单一SAR影像的相位信息基本没有统计特征,只有振幅信息可用于目标识别和分类等应用。振幅信息深受噪声的影响,加之SAR影像特有的几何畸变(叠掩、透视收缩、多路径虚假目标等)特征。光学图像在信息量和统计上更易进行图像分割。
在早期的干涉相位滤波中,技术人员是将一般的光学的滤波算法加以改进和调整,并不能很好的保留干涉相位的特点,会将一部分有用的信息过滤除去,并且不能很好的保留图片的边缘信息细节。
发明内容
针对一般的光学的滤波算法不能很好的保留干涉相位的特点,会将一部分有用的信息过滤除去,并且不能很好的保留图片的边缘信息细节的问题,本发明采用了利用圆周的周期性,有效的保留了相位信息。本算法可以弥补这两点,做到滤波后图像剩余细节的最大化。
本发明是通过采用以下的技术方案来实现的:利用中值做计算就可以有效的减少颗粒噪声。采取加权的方法,离中心值接近的点权值就大,反之则小,可以有效的区分噪声并过滤掉。利用圆周的周期性可以有效地保护相位信息。在窗口内的相加也可以滤除一部分的高斯噪声。
根据本发明的一个方面,提供一种用于对图像数据进行滤波的方法,所述方法包括:
获取待处理的图像数据,将所述待处理的图像数据内多个像素点中每个像素点依次选择作为目标像素点;
以目标像素点为中心构建滤波窗口,将所述滤波窗口内多个相位中的每个相位进行矢量相加,以获得多个相位的和矢量;
计算所述滤波窗口内多个相位中的任意两个相位之间的相角差,以获得多个相角差;
按照相角差的值的降序顺序对多个相角差进行排序,以生成相角差列表,基于相角差列表确定多个相角差的中位数;
基于多个相角差的中位数为每个相角差确定权重值,从而获得多个权重值,对多个权重值进行归一化处理,以获得经过归一化处理的多个权重值;
将经过归一化处理的每个权重值与滤波窗口中除目标像素点之外的相应像素点进行关联,并计算经过归一化处理的每个权重值和每个相角差的加权和;
将加权和与所述和矢量的相位主值相加,以确定目标像素点的滤波参数,基于目标像素点的滤波参数与滤波阈值的比较结果确定目标像素点的滤波结果。
所述图像数据为光学图像数据或合成孔径雷达SAR图像数据。
所述图像数据为具有相位信息的图像数据。
通过以下公式来计算计算所述滤波窗口内多个相位中的任意两个相位之间的相角差:
其中j为复数单位,
其中滤波窗口的大小为(2N+1)×(2M+1),n、m、N和M为自然数。基于多个相角差的中位数为每个相角差确定权重值包括:
确定多个相角差中每个相角差与中位数的差值;
基于所述差值确定每个相角差的权重值。
其中滤波窗口内的相角差与所述中位数的差值越小,那么相角差的权重值越大。
其中滤波窗口内的相角差与所述中位数的差值越大,那么相角差的权重值越小。
根据待处理的图像数据内多个像素点中每个像素点的滤波结果,确定待处理的图像数据的滤波结果。
根据本发明的另一方面,提供一种用于对图像数据进行滤波的系统,所述系统包括:
选择装置,获取待处理的图像数据,将所述待处理的图像数据内多个像素点中每个像素点依次选择作为目标像素点;
获得装置,以目标像素点为中心构建滤波窗口,将所述滤波窗口内多个相位中的每个相位进行矢量相加,以获得多个相位的和矢量;
计算装置,计算所述滤波窗口内多个相位中的任意两个相位之间的相角差,以获得多个相角差;
排序装置,按照相角差的值的降序顺序对多个相角差进行排序,以生成相角差列表,基于相角差列表确定多个相角差的中位数;
处理装置,基于多个相角差的中位数为每个相角差确定权重值,从而获得多个权重值,对多个权重值进行归一化处理,以获得经过归一化处理的多个权重值;
关联装置,将经过归一化处理的每个权重值与滤波窗口中除目标像素点之外的相应像素点进行关联,并计算经过归一化处理的每个权重值和每个相角差的加权和;
滤波装置,将加权和与所述和矢量的相位主值相加,以确定目标像素点的滤波参数,基于目标像素点的滤波参数与滤波阈值的比较结果确定目标像素点的滤波结果。
所述图像数据为光学图像数据或合成孔径雷达SAR图像数据。
所述图像数据为具有相位信息的图像数据。
计算装置通过以下公式来计算计算所述滤波窗口内多个相位中的任意两个相位之间的相角差:
其中j为复数单位,
其中滤波窗口的大小为(2N+1)×(2M+1),n、m、N和M为自然数。处理装置基于多个相角差的中位数为每个相角差确定权重值包括:
处理装置确定多个相角差中每个相角差与中位数的差值;
处理装置基于所述差值确定每个相角差的权重值。
其中滤波窗口内的相角差与所述中位数的差值越小,那么相角差的权重值越大。
其中滤波窗口内的相角差与所述中位数的差值越大,那么相角差的权重值越小。
根据待处理的图像数据内多个像素点中每个像素点的滤波结果,确定待处理的图像数据的滤波结果。
本发明所提供的一种针对相位的滤波方法,包括对光学图片的滤波、SAR图像的滤波以及其他含有相位信息图片的滤波。可以很好的保留图片所带的相位信息,并且可以很好的保留图片的一些边缘细节。
本发明通过利用圆周的周期性和加权的平均性,当我们用窗口内相角差的中值作为计算权值的基础时,就可以有效的避免掉颗粒点噪声的干扰,因为颗粒点噪声被赋予的权值将会非常小,因此我们在窗口内进行累加的时候就可以近似的忽略掉这些颗粒噪声的影响,在窗口内做累加的同时又相当于做了均值滤波的操作,因此可以带上一点均值滤波的优点,在滤波的过程中可以滤除掉一些高斯噪声的影响。
附图说明
通过参考下面的附图,可以更为完整地理解本发明的示例性实施方式:
图1为根据本发明实施方式的用于对图像数据进行滤波的方法的流程图;
图2为根据本发明实施方式的改进的滤波算法的示意图;
图3为根据本发明实施方式的图像处理的示意图;以及
图4为根据本发明实施方式的用于对图像数据进行滤波的系统的结构示意图。
具体实施方式
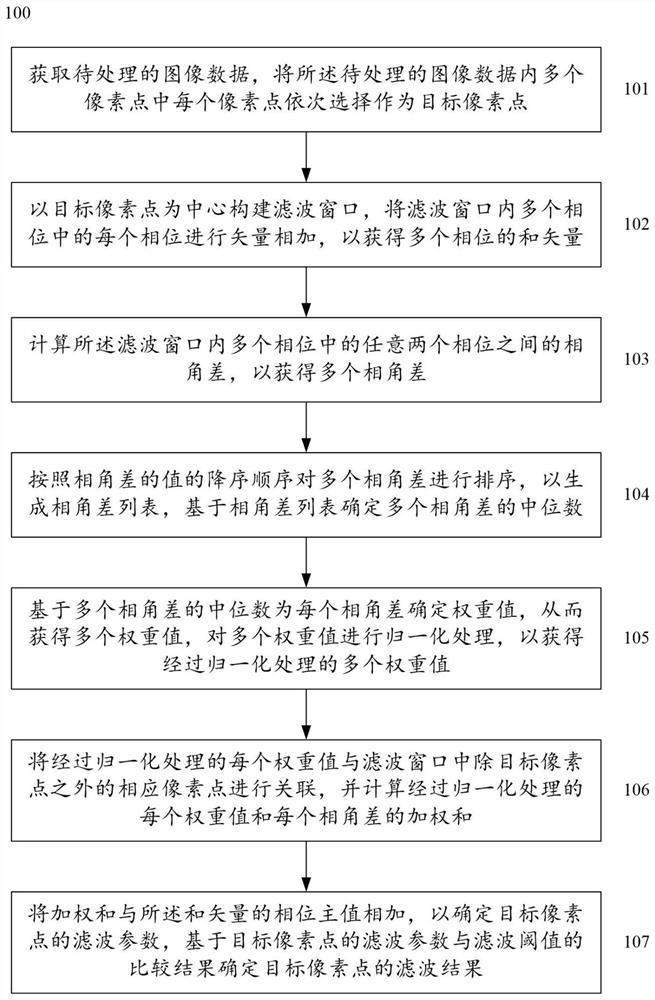
图1为根据本发明实施方式的用于对图像数据进行滤波的方法100的流程图。方法100从步骤101处开始。
在步骤101,获取待处理的图像数据,将所述待处理的图像数据内多个像素点中每个像素点依次选择作为目标像素点。
在步骤102,以目标像素点为中心构建滤波窗口,将所述滤波窗口内多个相位中的每个相位进行矢量相加,以获得多个相位的和矢量。
在步骤103,计算所述滤波窗口内多个相位中的任意两个相位之间的相角差,以获得多个相角差。
在步骤104,按照相角差的值的降序顺序对多个相角差进行排序,以生成相角差列表,基于相角差列表确定多个相角差的中位数。
在步骤105,基于多个相角差的中位数为每个相角差确定权重值,从而获得多个权重值,对多个权重值进行归一化处理,以获得经过归一化处理的多个权重值。
在步骤106,将经过归一化处理的每个权重值与滤波窗口中除目标像素点之外的相应像素点进行关联,并计算经过归一化处理的每个权重值和每个相角差的加权和。
在步骤107,将加权和与所述和矢量的相位主值相加,以确定目标像素点的滤波参数,基于目标像素点的滤波参数与滤波阈值的比较结果确定目标像素点的滤波结果。
图像数据为光学图像数据或合成孔径雷达SAR图像数据。图像数据为具有相位信息的图像数据。优选地,通过以下公式来计算计算所述滤波窗口内多个相位中的任意两个相位之间的相角差:
其中j为复数单位,
其中滤波窗口的大小为(2N+1)×(2M+1),n、m、N和M为自然数。基于多个相角差的中位数为每个相角差确定权重值包括:确定多个相角差中每个相角差与中位数的差值;基于所述差值确定每个相角差的权重值。其中滤波窗口内的相角差与所述中位数的差值越小,那么相角差的权重值越大。其中滤波窗口内的相角差与所述中位数的差值越大,那么相角差的权重值越小。根据待处理的图像数据内多个像素点中每个像素点的滤波结果,确定待处理的图像数据的滤波结果。
具体地,首先选取一个像素点,以此像素点为中心形成一个滤波窗口,将滤波窗口的每一个相位进行相加,求出他们的和矢量O
图4为根据本发明实施方式的用于对图像数据进行滤波的系统400的结构示意图。系统400包括:选择装置401、获得装置402、计算装置403、排序装置404、处理装置405、关联装置406以及滤波装置407。
选择装置401,获取待处理的图像数据,将所述待处理的图像数据内多个像素点中每个像素点依次选择作为目标像素点。
获得装置402,以目标像素点为中心构建滤波窗口,将所述滤波窗口内多个相位中的每个相位进行矢量相加,以获得多个相位的和矢量。
计算装置403,计算所述滤波窗口内多个相位中的任意两个相位之间的相角差,以获得多个相角差。
排序装置404,按照相角差的值的降序顺序对多个相角差进行排序,以生成相角差列表,基于相角差列表确定多个相角差的中位数。
处理装置405,基于多个相角差的中位数为每个相角差确定权重值,从而获得多个权重值,对多个权重值进行归一化处理,以获得经过归一化处理的多个权重值。
关联装置406,将经过归一化处理的每个权重值与滤波窗口中除目标像素点之外的相应像素点进行关联,并计算经过归一化处理的每个权重值和每个相角差的加权和。
滤波装置407,将加权和与所述和矢量的相位主值相加,以确定目标像素点的滤波参数,基于目标像素点的滤波参数与滤波阈值的比较结果确定目标像素点的滤波结果。
图像数据为光学图像数据或合成孔径雷达SAR图像数据。图像数据为具有相位信息的图像数据。计算装置403通过以下公式来计算计算所述滤波窗口内多个相位中的任意两个相位之间的相角差:
其中j为复数单位,
其中滤波窗口的大小为(2N+1)×(2M+1),n、m、N和M为自然数。处理装置405基于多个相角差的中位数为每个相角差确定权重值包括:处理装置确定多个相角差中每个相角差与中位数的差值;处理装置基于所述差值确定每个相角差的权重值。其中滤波窗口内的相角差与所述中位数的差值越小,那么相角差的权重值越大。其中滤波窗口内的相角差与所述中位数的差值越大,那么相角差的权重值越小。根据待处理的图像数据内多个像素点中每个像素点的滤波结果,确定待处理的图像数据的滤波结果。
举例来说,首先选取一个像素点,以此像素点为中心形成一个滤波窗口,将滤波窗口的每一个相位进行相加,求出他们的和矢量,在对和矢量进行相位主值的求解。其次继续对滤波窗口内的值进行处理,对窗口内的每一个相位进行相角差的计算,求得相角差后,对得到的相角差进行求中值的计算,得到相角差的中值后,以求得的中值为基础,对窗口内的每一个相角差都进行求权值的计算,如果窗口内的相位差越接近所求的中值,那么该相位差所获得的权值就越大,求得权值后在进行权值归一化的处理。在求得权值和相位差后,将窗口内每一个像素点的权值与相位差相乘再把窗口内所有像素点的结果相加,最后在加上第一步所求和矢量的相位主值,就可以的到我们所求窗口中心点的滤波结果。将此中心点在数据图片的每一个像素点遍历一遍,即得到我们所要的滤波结果。
- 一种用于对图像数据进行滤波的方法及系统
- 用于对图像数据进行滤波的方法