多工位输送线
文献发布时间:2023-06-19 10:30:40
技术领域
本发明属于床垫生产技术领域,尤其是涉及多工位输送线。
背景技术
在床垫生产过程中,为了避免大量使用人力去搬运床垫,需要用机器对床垫进行运输,但是现有技术中对于多工位输送线的传输还是需要人力使床垫从一个传输机构到另一个传输机构,或者从一个传输机构到一个工位,造成了人力消耗过大的情况,所以我们需要设计一个新的传输机构,用机械搬运。
发明内容
有鉴于此,本发明旨在提出多工位输送线,以解决人力搬运消耗过大的问题。
为达到上述目的,本发明的技术方案是这样实现的:
多工位输送线,包括工作台机构、第一辅助传送机构、第一主传送机构、第二辅助传送机构、第二主传送机构和传送带机构,自左至右依次设置工作台机构、第一辅助传送机构、第一主传送机构、第二辅助传送机构、第二主传送机构,传送带机构包括传送带、主动轮、从动轮、第一连接板、第二连接板、第三连接板、第四连接板、横板、连接单元、气缸和第二电机,主动轮和从动轮通过传送带连接,主动轮的固定连接至第二电机的转动轴,主动轮的两端分别套接第一连接板、第二连接板,从动轮的两端分别套接第三连接板、第四连接板,横板为矩形板结构,横板四个角分别固定连接至第一连接板、第二连接板、第三连接板、第四连接板,横板底面固定连接至气缸,第一连接板底端、第二连接板底端、第三连接板底端、第四连接板底端均安装一个连接单元,且传送带、主动轮、从动轮、第一连接板、第二连接板、第三连接板、第四连接板均位于第一主传送机构的下方。
进一步的,所述第一主传送机构包括平行设置的第一挡板、第二挡板,第一挡板和第二挡板之间安装若干第一转动轮,且邻近的两个第一转动轮之间设有间隙,每个第一转动轮右端先套接第二挡板后,均通过一个连接杆固定连接至一个第二主传送机构的第二转动轮,且每个连接杆均通过皮带连接至第一电机,第一挡板下方安装若干第一支撑脚,上方通过第一辅助传送机构固定连接至工作台机构,第二挡板下方安装若干第二支撑脚。
进一步的,所述传送带处于所述间隙的正下方。
进一步的,所述连接单元包括伸缩杆和底座,第一连接板底端通过伸缩杆固定连接至底座。
进一步的,所述传送带的高度要低于所述第一转动轮的高度。
进一步的,所述第一辅助传送机构和第二辅助传送机构结构相同,第二辅助传送机构包括第三转动轮、第一竖板、第二竖板、第二皮带和第三电机,第一竖板和第二竖板之间安装若干第三转动轮,每个第三转动轮的一端均通过第二皮带连接至第三电机,且第一竖板底面左端和第二竖板底面左端均固定连接至第二挡板,第一竖板底面右端和第二竖板底面右端端均固定连接至第二主传送机构的第三挡板。
相对于现有技术,本发明所述的多工位输送线具有以下优势:
(1)本发明所述的多工位输送线,构造简单,安装方便,避免了人力消耗过大的情况发生,工作台机构作为工作人员的工位使用,第一辅助传送机构、第二辅助传送机构和传送带机构用于将床垫从第一主传送机构移动到第二主传送机构,或者从第一主传送机构移动到工作台机构,气缸用于将传送带抬高,使传送带传输床垫。
(2)本发明所述的多工位输送线,传送带的高度要低于所述第一转动轮的高度,保证床垫被第一转动轮传输,所述传送带处于所述间隙的正下方,保证传送带工作时不会被若干第一转动轮阻挡,横板用于带动第一连接板和第二连接板,第一连接板、第二连接板分别带动主动轮、从动轮,主动轮和从动轮均用于带动传送带。
附图说明
构成本发明的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
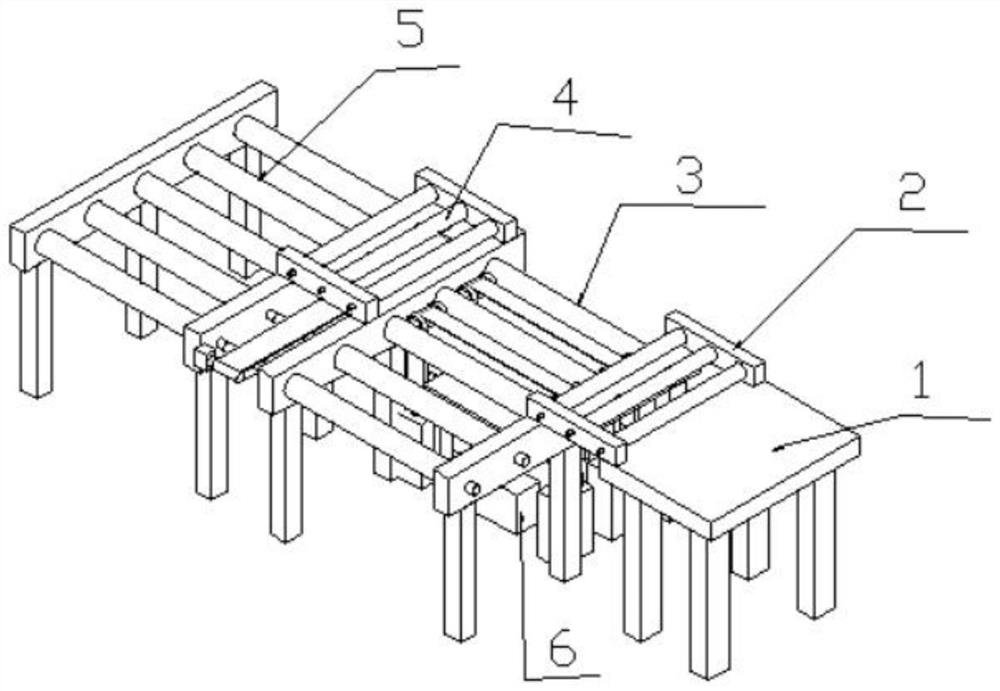
图1为本发明实施例所述的多工位输送线的第一示意图;
图2为本发明实施例所述的多工位输送线的第二示意图;
图3为本发明实施例所述的第一主传送机构、第二主传送机构和传送带机构的装配示意图;
图4为本发明实施例所述的传送带机构的示意图;
图5为本发明实施例所述的第二辅助传送机构的示意图;
图6为本发明实施例所述的第一辅助传送机构的示意图。
附图标记说明:
1-工作台机构;11-工作台;12-支脚;2-第一辅助传送机构;21-第四转动轮;22-第三竖板;23-第四竖板;3-第一主传送机构;31-第一转动轮;32-第一挡板;33-第二挡板;34-第一支撑脚;35-第二支撑脚;36-连接杆;37-皮带;4-第二辅助传送机构;41-第三转动轮;42-第一竖板;43-第二竖板;5-第二主传送机构;51-第二转动轮;52-第三挡板;53-第四挡板;54-第三支撑脚;55-第四支撑脚;6-传送带机构;61-传送带;62-主动轮;63-从动轮;64-第一连接板;65-第二连接板;66-第三连接板;67-第四连接板;68-横板;69-连接单元;691-伸缩杆;692-底座。
具体实施方式
需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”等的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以通过具体情况理解上述术语在本发明中的具体含义。
下面将参考附图并结合实施例来详细说明本发明。
如图1-6所示,多工位输送线包括:工作台机构1、第一辅助传送机构2、第一主传送机构3、第二辅助传送机构4、第二主传送机构5和传送带机构6,自左至右依次设置工作台机构1、第一辅助传送机构2、第一主传送机构3、第二辅助传送机构4、第二主传送机构5,第一辅助传送机构2、第二辅助传送机构4和传送带机构6用于将床垫从第一主传送机构3移动到第二主传送机构5,或者从第一主传送机构3移动到工作台机构1,传送带机构6包括传送带61、主动轮62、从动轮63、第一连接板64、第二连接板65、第三连接板66、第四连接板67、横板68、连接单元69、气缸和第二电机,主动轮62和从动轮63通过传送带61连接,主动轮62的固定连接至第二电机的转动轴,主动轮62的两端分别套接第一连接板64、第二连接板65,从动轮63的两端分别套接第三连接板66、第四连接板67,横板68为矩形板结构,横板68四个角分别固定连接至第一连接板64、第二连接板65、第三连接板66、第四连接板67,横板68底面固定连接至气缸,第一连接板64底端、第二连接板65底端、第三连接板66底端、第四连接板67底端均安装一个连接单元69,且传送带61、主动轮62、从动轮63、第一连接板64、第二连接板65、第三连接板66、第四连接板67均位于第一主传送机构3的下方,气缸用于将传送带61抬高,气缸的电磁阀的型号为ZC51-15HB,第二电机使传送带61传输床垫,横板68用于带动第一连接板64、第二连接板65、第三连接板66和第四连接板67,第一连接板64和第二连接板65带动主动轮62,第三连接板66和第四连接板67带动从动轮63,主动轮62和从动轮63均用于带动传送带61。
如图3所示,所述第一主传送机构3包括平行设置的第一挡板32、第二挡板33,第一挡板32和第二挡板33之间安装若干第一转动轮31,且邻近的两个第一转动轮31之间设有间隙,每个第一转动轮31右端先套接第二挡板33后,均通过一个连接杆36固定连接至一个第二主传送机构5的第二转动轮51,且每个连接杆36均通过皮带37连接至第一电机,第一挡板32下方安装若干第一支撑脚34,上方通过第一辅助传送机构2固定连接至工作台机构1,第二挡板33下方安装若干第二支撑脚35,第一支撑脚34和第二支撑脚35均起支撑作用,第一转动轮31用于传输床垫,第一电机和第二电机为三相异步电动机,且型号均为Y2-100L24-3KW;
所述第二主传送机构5包括第二转动轮51、第三挡板52、第四挡板53、第三支撑脚54和第四支撑脚55,第三挡板52和第四挡板53之间安装若干第二转动轮51,每个第二转动轮51左端先套接第三挡板52后,均通过一个连接杆36固定连接至一个第一转动轮31,第三挡板52下方安装若干第三支撑脚54,第四挡板53下方安装若干第四支撑脚55,第二转动轮51用于传输床垫。
如图3所示,所述传送带61处于所述间隙的正下方,保证传送带6工作时不会被若干第一转动轮31阻挡。
如图4所示,所述连接单元69包括伸缩杆691和底座692,第一连接板69底端通过伸缩杆691固定连接至底座692,底座692起支撑作用。
如图3-4所示,所述传送带61的高度要低于所述第一转动轮31的高度,保证床垫被第一转动轮31传输。
如图2所示,所述工作台机构1包括工作台11和支脚12,工作台11下方安装若干支脚12,上方通过第一辅助传送机构2固定连接至第一挡板32顶面,工作台11作为工位使用。
如图5-6所示,所述第一辅助传送机构2和第二辅助传送机构4结构相同,第二辅助传送机构4包括第三转动轮41、第一竖板42、第二竖板43、第二皮带和第三电机,第一竖板42和第二竖板43之间安装若干第三转动轮41,每个第三转动轮41的一端均通过第二皮带连接至第三电机,且第一竖板42底面左端和第二竖板43底面左端均固定连接至第二挡板33,第一竖板42底面右端和第二竖板43底面右端端均固定连接至第二主传送机构5的第三挡板52,便于第三转动轮41床垫滑行;
所述第一辅助传送机构2包括第四转动轮21、第三竖板22、第四竖板23、第三皮带和第四电机,第三竖板22和第四竖板23之间安装若干第四转动轮21,每个第四转动轮21的一端均通过第三皮带连接至第四电机,且第三竖板22底面左端和第四竖板23底面左端均固定连接至工作台11,第三竖板22底面右端和第四竖板23底面右端均固定连接至第一挡板32,第四转动轮21便于床垫滑行,第三电机和第四电机也为三相异步电动机,且型号均为Y2-100L24-3KW。
本发明的工作原理:第一电机为常开状态,工作人员打开第一电机,第一电机带动连接杆36转动,连接杆36带动第一转动轮31和第二转动轮51转动。
当需要将床垫从第一主传送机构3传输到第二主传送机构5时:工作人员依次打开第二电机的开关、第三电机的开关和气缸的电磁阀,第二电机带动主动轮62转动,主动轮62带动传送带61转动,使传送带61向第二挡板33的方向运输,第三电机带动第三转动轮41,保证第三转动轮41能向第二挡板33的方向运输床垫,气缸的电磁阀使气缸的杆端向上移动,气缸的杆端使横板68向上移动,横板68使传送带61向上移动,气缸使传送带61的高度大于第二挡板33的高度,传送带61将床垫传送至第三转动轮41上,床垫第三转动轮41被向第三挡板52的方向继续运输,最终床垫落在第二转动轮51,被第二转动轮51运输进行后续工作。
当需要将床垫从第一主传送机构3传输到工作台机构1时:工作人员依次打开第二电机的开关,第四电机的开关和气缸的电磁阀,第二电机带动主动轮62转动,主动轮62带动传送带61转动,使传送带61向第一挡板32的方向运输,第四电机带动第四转动轮21转动,保证第四转动轮21能向第一挡板32的方向运输床垫,气缸的电磁阀使气缸的杆端向上移动,气缸的杆端使横板68向上移动,横板68使传送带61向上移动,气缸使传送带61的高度大于第二挡板33的高度,传送带61将床垫传送至第四转动轮21上,床垫被第四转动轮21向工作台1的方向继续运输,最终床垫落在工作台1上,工作人员便可对床垫做后续的加工。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种沿着输送线输送容器的机构、将容器从输送线传送到称重工位、或者反之亦然
- 一种输送线的工位调节机构