一种高空抛物监测预警系统及方法
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及智慧城市安防监控及物联网领域,具体涉及一种高空抛物监测预警系统及方法。
背景技术
随着城市化的快速推进,城市人口密度越来越大,房屋需求也逐渐增加,但是,由于城市土地面积有限,房屋逐渐向空中发展,产生大量的高楼和超高楼,与此同时,由于住户良莠不齐,高空抛物的问题时有发生,不仅污染公共环境,严重时会对行人的人身安全造成严重损害。
目前对高空抛物取证主要采用以下解决方案:a、利用小区视频安防监控摄像机拍摄记录高空抛物事件,形成过程视频录像,便于事后调查取证使用;b、利用高空抛物专用摄像机,具备事件智能侦测功能,当一定大小目标物体在下落过程中,支持对下落物体轨迹实时跟踪,并推送报警信息给到后台客户端,方便相关人员及时对现场环境进行查证处置。
但是,上述两种取证方式均存在以下缺点:(1)、两种方式均为事后取证,难以在事情发生时采取积极措施,均会产生不良后果;(2)、事后取证追责时,不仅需要进行大量的数据处理,且难以将肇事者的排查范围最小化,效率较低且准确度较低。
发明内容
针对现有技术中存在的缺陷,本发明的目的在于提供一种高空抛物监测预警系统及方法,能够提高定位排查的效率和准确度。
为达到以上目的,本发明采取的技术方案是:
一种高空抛物监测预警系统,包括监控机构,还包括数据处理机构、报警机构和任务分配机构,所述监控机构用于实时拍摄待检测楼面的图像信息并发送至数据处理机构,数据处理机构对图像信息进行处理,将高空抛物信息发送给报警机构,将高空抛物信息和位置信息发送给任务分配机构;
所述报警机构在收到高空抛物信息时进行报警,所述任务分配机构与工作人员的移动设备连接,所述任务分配机构收到高空抛物信息和位置信息时,搜索当前高空抛物信息发生位置周边工作人员信息,并发送处理信息至距离最近的工作人员,工作人员至现场进行应急处理。
进一步的,当所述数据处理机构根据图像信息能够直接精确定位高空抛物肇事者位置时,位置信息为定位信息;当数据处理机构根据图像信息难以直接精确定位高空抛物肇事者位置时,对图像信息进行处理并确定肇事者的最小化范围,位置信息为最小化范围信息。
进一步的,所述任务分配机构与待检测楼面所在小区的业务系统对接,其具体处理方式如下:
数据处理机构将高空抛物信息和位置信息(定位信息或最小化范围信息)发送至任务分配机构,任务分配机构获取高空抛物信息的数量及相应的位置区域,同时,实时获取当前工作人员的位置信息,任务分配机构根据业务流程机制自动配置工单信息,基于人员实时位置信息,通过匹配算法策略,自动关联匹配的工作人员,完成系统自动派单动作;派单后,任务分配机构实时监测当前工单状态。
进一步的,所述监控机构包括普通网络摄像机和至少一台云台式电动光学变焦网络摄像机,普通网络摄像机的数量为N,N≥0,所述普通网络摄像机、云台式电动光学变焦网络摄像机均部署在待监控楼面的地面上,所述普通网络摄像机、云台式电动光学变焦网络摄像机相互连接且能够实现联动,普通网络摄像机能够向云台式电动光学变焦网络摄像机发送指令,控制云台式电动光学变焦网络摄像机的监控范围,所述云台式电动光学变焦网络摄像机能够自动变焦,实现高空抛物目标的快速追踪和精确捕获。
进一步的,所述云台式电动光学变焦网络摄像机自动根据普通网络摄像机发送的指令自动调整监控范围,并自动追踪高空抛物目标,其原理是基于云台式电动光学变焦网络摄像机和普通网络摄像机之间的坐标转换;
具体转换的计算方法如下:
普通网络摄像机视域中任意点的二维坐标(x,y)投影于一个云台式电动光学变焦网络摄像机的PTZ坐标,PTZ坐标可以转化为垂直高度Q和水平方位角B;
对任意目标区域的中心点坐标(x,y)进行坐标的建立时,可以通过公式一建立映射关系:
公式一表示普通网络摄像机的视域平面中任意一点(x,y)到云台式电动光学变焦网络摄像机坐标中的垂直高度角和水平方位角(θ,β)的映射,f
进一步的,选取三个以上的定标点,用最小二乘法得到矩阵A的具体推导方法如下:
令rsinθcosβ为M,rsinθsinβ为N,
M=a
方程组是齐次的,由于工程实践应用会存在一定的偏移量,需要引入常量补偿校正,使得公式能够满足实际工程应用需要,因此,对等式进行修正并得到:
M=a
若获取n个样本,由于方程组是齐次的,以M=a
对三个参数a
求取N式的参数,获取矩阵A参数,最后的结果为:
进一步的,所述公式一的具体推导方法如下:
所述普通网络摄像机是以中心Ow为原点的三维直角坐标系(Xw,Yw,Zw)中的点,其在云台式电动光学变焦网络摄像机坐标中的映射点为以Op为原点的球面坐标系中的坐标(ρ,θ,β);
假设普通网络摄像机的坐标系原点Ow和云台式电动光学变焦网络摄像机的中心Op之间的距离足够小,远小于ρ,则普通网络摄像机的坐标系中的点(Xw,Yw,Zw)与其对应的云台式电动光学变焦网络摄像机坐标系(ρ,θ,β)的关系如公式二:
其中,R为坐标旋转矩阵,
(x*,y*)与(Xw,Yw,Zw)之间的关系由
通常摄像机平面坐标(X,Y,0)的原点0为像平面左上角,因此(x*,y*)在坐标系(X,Y,0)中的坐标系(x’,y’)=(x*+c’x,y*+c’y),且(c’x,c’y)与O*重合,即(c’x,c’y)为普通网络摄像机像平面的光学中心;
在坐标系(X,Y,0)中,将(x’,y’)=(x*+c’x,y*+c’y)代入公式三,得到公式四:
其中,
将每个像素在x方向和y方向上的长度因子mx、my代入可得到公式五:
x'=xm
其中(x,y)和(c
进一步的,所述云台式电动光学变焦网络摄像机的变焦放大倍数计算可以由公式六计算得到:
其中,f
一种基于高空抛物监测预警系统的方法,包括以下步骤:
S1、监控机构实时监控相关楼面是否出现高空抛物,在出现时将图像信息发送至数据处理机构;
S2、数据处理机构处理图像信息,并发送定位信息和高空抛物信息至任务分配机构;
S3、任务分配机构发送报警信息和范围信息至报警机构和任务分配机构;
S4、报警机构在收到报警信号时进行报警,所述任务分配机构与工作人员的移动设备连接,所述任务分配机构收到报警信号时,搜索当前高空抛物信息发送位置周边工作人员信息,并发送处理信息至距离最近的工作人员,工作人员至现场进行应急处理。
与现有技术相比,本发明的优点在于:
(1)本发明中的一种高空抛物监测预警系统,将普通网络摄像机拍摄的广角视频图像中的目标区域的中心位置,转化为云台式电动光学变焦网络摄像机中的PTZ坐标对准该目标区域时的水平方位角和垂直方位角,使得目标区域的中心位置位于所述云台式电动光学变焦网络摄像机所拍摄的局部图像的画面中央,并且将普通网络摄像机所拍摄的画面中目标区域的大小信息转换成云台式电动光学变焦网络摄像机的焦距,用来调整云台式电动光学变焦网络摄像机对局部进行放大特写时的放大倍数,通过以上方法实现云台式电动光学变焦网络摄像机位置和倍数的调整,从而达到较好的目标追踪效果,进而能够确定目标物的准确位置,提高效率。
附图说明
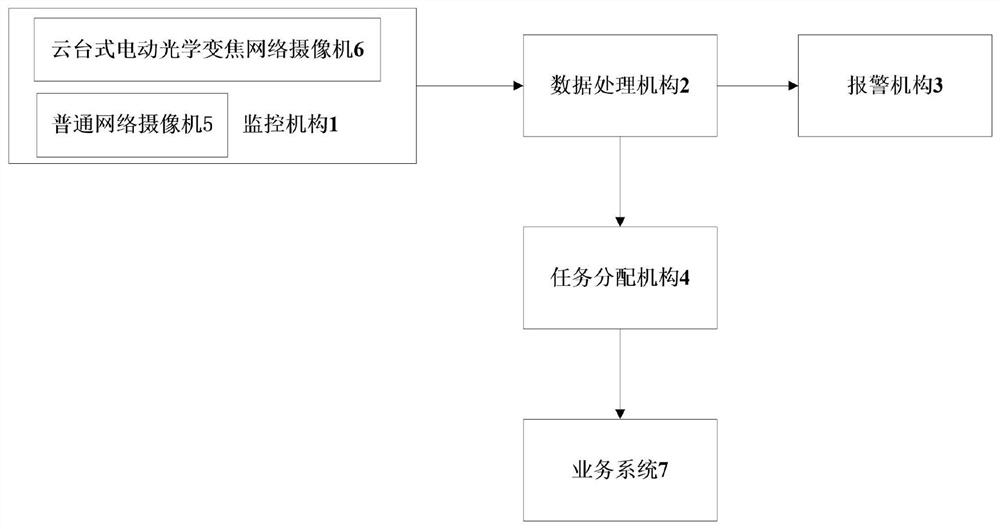
图1为本发明实施例中高空抛物监测预警系统的结构框图;
图2为本发明实施例中高空抛物监测预警方法的流程图。
图中:1-监控机构,2-数据处理机构,3-报警机构,4-任务分配机构,5-普通网络摄像机,6-云台式电动光学变焦网络摄像机,7-业务系统。
具体实施方式
以下结合附图对本发明的实施例作进一步详细说明。
参见图1所示,本发明实施例提供一种高空抛物监测预警系统,包括监控机构1、数据处理机构2、报警机构3和任务分配机构4,所述监控机构1用于实时拍摄待检测楼面的图像信息并发送至数据处理机构2,数据处理机构2对图像信息进行处理,将高空抛物信息发送给报警机构3,将高空抛物信息和位置信息发送给任务分配机构4。
当数据处理机构2根据图像信息能够直接精确定位高空抛物肇事者位置时,位置信息为定位信息;当数据处理机构2根据图像信息难以直接精确定位高空抛物肇事者位置时,对图像信息进行处理并确定肇事者的最小化范围,位置信息为最小化范围信息。
所述报警机构3在收到高空抛物信息时进行报警,所述任务分配机构4与工作人员的移动设备连接,所述任务分配机构4收到高空抛物信息和位置信息时,搜索当前高空抛物信息发生位置周边工作人员信息,并发送处理信息至距离最近的工作人员,工作人员至现场进行应急处理。
所述任务分配机构4与待检测楼面所在小区的业务系统7对接,其具体处理方式如下:
数据处理机构2将高空抛物信息和位置信息定位信息或最小化范围信息发送至任务分配机构4,任务分配机构4获取高空抛物信息的数量及相应的位置区域,同时,实时获取当前工作人员的位置信息,任务分配机构4根据业务流程机制物业制定的相关规定自动配置工单信息,基于人员实时位置信息,通过匹配算法策略,自动关联匹配的工作人员,完成系统自动派单动作;派单后,任务分配机构4实时监测当前工单状态,自动对接单人的操作,包括不限于接单时间、接单人当前位置等信息做记录。
所述监控机构1包括普通网络摄像机5和至少一台云台式电动光学变焦网络摄像机6,普通网络摄像机5的数量为N,N≥0,所述普通网络摄像机5、云台式电动光学变焦网络摄像机6均部署在待监控楼面的地面上,所述普通网络摄像机5、云台式电动光学变焦网络摄像机6相互连接且能够实现联动,普通网络摄像机5能够向云台式电动光学变焦网络摄像机6发送指令,控制云台式电动光学变焦网络摄像机6的监控范围,所述云台式电动光学变焦网络摄像机6能够自动变焦,实现高空抛物目标的快速追踪和精确捕获。
在实际使用中,根据具体需要设置普通网络摄像机5和云台式电动光学变焦网络摄像机6的数量,本实施例中,100米高的楼面选用两台普通网络摄像机5和一台云台式电动光学变焦网络摄像机6。
在无高空抛物事件发生时,两台普通网络摄像机5通过接力的方式监控1~60m的楼面范围,云台式电动光学变焦网络摄像机6监控60~100m的楼面范围(其中,60层由云台式电动光学变焦网络摄像机6监控)。
当发生高空抛物时,若出现在60~100m的楼面,云台式电动光学变焦网络摄像机6保持监控范围不变,通过自动变焦,实现高空抛物目标的快速追踪和精确捕获;若出现在1~60m的楼面,普通网络摄像机5发生联动信号至云台式电动光学变焦网络摄像机6,云台式电动光学变焦网络摄像机6转动并将监控视场调整至1~60m的楼面,并根据普通网络摄像机5实时图像捕捉高空抛物目标,通过自动变焦对高空抛物目标进行自动追踪,实现高空抛物目标的快速追踪和精确捕获。
本实施例中,云台式电动光学变焦网络摄像机6自动根据普通网络摄像机5发送的指令自动调整监控范围,并自动追踪高空抛物目标,其原理是基于云台式电动光学变焦网络摄像机6和普通网络摄像机5之间的坐标转换。
具体转换的计算方法如下:
普通网络摄像机5视域中任意点的二维坐标(x,y)投影于一个云台式电动光学变焦网络摄像机6的PTZ坐标,PTZ坐标可以转化为垂直高度Q和水平方位角B。
对任意目标区域的中心点坐标(x,y)进行坐标的建立时,可以通过公式一建立映射关系:
公式一表示普通网络摄像机5的视域平面中任意一点(x,y)到云台式电动光学变焦网络摄像机6坐标中的垂直高度角和水平方位角(θ,β)的映射,fx、fy、ax、ay以及矩阵A则是该映射的参数。
其中,
其中fx、fy、ax、ay可以通过畸变校正方法算出,矩阵A可以通过定标方法得出,定标方法即选取三个以上的定标点,用最小二乘法得到。
公式一的具体推导方法如下:
参见图2所示,普通网络摄像机5是以中心Ow为原点的三维直角坐标系(Xw,Yw,Zw)中的点,其在云台式电动光学变焦网络摄像机6坐标中的映射点为以Op为原点的球面坐标系中的坐标(ρ,θ,β)。
假设普通网络摄像机5的坐标系原点Ow和云台式电动光学变焦网络摄像机6的中心Op之间的距离足够小,远小于ρ,则普通网络摄像机5的坐标系中的点(Xw,Yw,Zw)与其对应的云台式电动光学变焦网络摄像机6坐标系(ρ,θ,β)的关系如公式二:
其中,R为坐标旋转矩阵,
(x*,y*)与(Xw,Yw,Zw)之间的关系由
通常摄像机平面坐标(X,Y,0)的原点0为像平面左上角,因此(x*,y*)在坐标系(X,Y,0)中的坐标系(x’,y’)=(x*+c’x,y*+c’y),且(c’x,c’y)与O*重合,即(c’x,c’y)为普通网络摄像机5像平面的光学中心。
在坐标系(X,Y,0)中,将(x’,y’)=(x*+c’x,y*+c’y)代入公式三,得到公式四:
其中,
将每个像素在x方向和y方向上的长度因子mx、my代入可得到公式五:
x'=xm
其中(x,y)和(c
云台式电动光学变焦网络摄像机6的变焦放大倍数计算可以由公式六计算得到:
其中,f
选取三个以上的定标点,用最小二乘法得到矩阵A的具体推导方法如下:
令rsinθcosβ为M,rsinθsinβ为N,
M=a
方程组是齐次的,由于工程实践应用会存在一定的偏移量,需要引入常量补偿校正,使得公式能够满足实际工程应用需要,因此,对等式进行修正并得到:
M=a
若获取n个样本,由于方程组是齐次的,以M=a
对三个参数a
求取N式的参数,获取矩阵A参数,最后的结果为:
总体来讲,后端系统初始化时完成对坐标转换的标定工作,在普通网络摄像机坐标系中选取任意的三个坐标,输入坐标的(x,y)值,完成对应点的云台式电动光学变焦网络摄像机标定工作,确定此时的角度坐标(θ,β)值。适当进行畸形校正后,确定f
本实施例将普通网络摄像机5拍摄的广角视频图像中的目标区域的中心位置,转化为云台式电动光学变焦网络摄像机6中的PTZ坐标对准该目标区域时的水平方位角和垂直方位角,使得目标区域的中心位置位于所述云台式电动光学变焦网络摄像机6所拍摄的局部图像的画面中央,并且将普通网络摄像机5所拍摄的画面中目标区域的大小信息转换成云台式电动光学变焦网络摄像机6的焦距,用来调整云台式电动光学变焦网络摄像机6对局部进行放大特写时的放大倍数,通过以上方法实现云台式电动光学变焦网络摄像机6位置和倍数的调整,从而达到较好的目标追踪效果,进而能够确定目标物的准确位置,提高效率。
数据处理机构(2)处理图像信息存在以下情形:a、根据图像信息能够直接精确定位到高空抛物肇事者位置;b、根据图像信息难以确定具体位置,计算出高空抛物肇事者所在的最小化范围。
针对a:直接通过对普通网络摄像机6和云台式电动光学变焦网络摄像机6的视频流信息(图像信息)进行分析提取即可得到高空抛物肇事者的位置坐标信息。
针对b:通过对普通网络摄像机6和云台式电动光学变焦网络摄像机6的视频流信息进行分析提取,难以得到高空抛物肇事者的位置坐标信息时,通过图像处理分析技术和系统算法处理后得到高空抛物肇事者的位置可排除范围,后端系统自动分析(如采用神经卷积网络算法)并锁定一个最小化范围,同时对已排除的范围同步有视频和图像记录,以便后续查证。
如对于20层高的楼面,经过系统分析计算后可明确排除15楼以下楼层造成高空抛物行为的可能,后端系统自动分析,锁定目标在19到20层中。
本发明还提供一种高空抛物监测预警方法,包括以下步骤:
S1、监控机构1实时监控相关楼面是否出现高空抛物,在出现时将图像信息发送至数据处理机构2。
S2、数据处理机构处理图像信息,并发送定位信息和高空抛物信息至任务分配机构4。
S3、任务分配机构4发送报警信息和范围信息至报警机构3和任务分配机构4。
S4、报警机构3在收到报警信号时进行报警,所述任务分配机构4与工作人员的移动设备连接,所述任务分配机构4收到报警信号时,搜索当前高空抛物信息发送位置周边工作人员信息,并发送处理信息至距离最近的工作人员,工作人员至现场进行应急处理。
其中,任务分配机构4收到报警信号时,搜索当前高空抛物信息发送位置周边工作人员信息,并发送处理信息至距离最近的工作人员,工作人员至现场进行应急处理。
本发明不仅局限于上述最佳实施方式,任何人在本发明的启示下都可得出其他各种形式的产品,但不论在其形状或结构上作任何变化,凡是具有与本发明相同或相近似的技术方案,均在其保护范围之内。
- 一种高空抛物监测预警系统及方法
- 一种灾害监测预警系统和构建灾害监测预警系统的方法