一种水平极化天线及雷达
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及毫米波雷达技术领域,特别是涉及一种水平极化天线及雷达。
背景技术
高级驾驶辅助系统(Advanced Driving Assistance System)是利用安装在车上的各式各样传感器(毫米波雷达、激光雷达、单\双目摄像头以及卫星导航),在汽车行驶过程中随时来感应周围的环境,收集数据,进行静态、动态物体的辨识、侦测与追踪,并结合导航仪地图数据,进行系统的运算与分析,从而预先让驾驶者察觉到可能发生的危险,有效增加汽车驾驶的舒适性和安全性。在各种传感器中,毫米波雷达能分辨识别很小的目标,而且能同时识别多个目标,具有穿透能力强,体积小、价格低廉等优点,因此,在智能驾驶领域的环境感知中具有广泛的应用。
在雷达传感器中,微带平面天线因其便于集成、成本较低的优点得到广泛使用。传统的微带天线阵列结构虽然能提供满足需求的高增益、低副瓣,但是其天线带宽一般较窄,且基于现有的加工方式,天线阵元远离馈线的一侧的两端均会有一定的圆角,该圆角对应相对的EA值,该EA值对天线的谐振频率会产生一定影响,为保证一定的带宽,现有的天线在加工时,要求较高,难度较大,从而导致生产成本较高、生产效率低。
发明内容
本发明提供了一种水平极化天线及雷达,该天线可以实现较宽的天线带宽,较小的增益变化,从而实现雷达的稳定探测,并且对于加工要求较低,降低了加工成本。
一种水平极化天线,包括至少一个单根线阵,所述单根线阵包括一馈线及至少一个阵元,所述阵元包括梯形结构,所述梯形结构包括平行的第一底边和第二底边,所述第一底边的长度小于所述第二底边,所述第一底边连接于所述馈线。
优选地,所述梯形结构的第一底边通过第一矩形结构连接于所述馈线,所述第一矩形结构包括平行设置的第三底边和第四底边,所述第一矩形结构的第三底边与所述馈线连接,所述第一矩形结构的第四底边与所述梯形结构的第一底边连接,且所述第一矩形结构的第四底边的长度与所述梯形结构的第一底边的长度相同。
优选地,所述梯形结构的第一底边和第二底边之间的间距为第一间距,所述第一矩形结构的第三底边与第四底边之间的间距为第二间距,所述第二间距不大于所述第一间距的五分之一。
优选地,所述梯形结构的第二底边设有第二矩形结构,所述第二矩形结构包括平行设置的第五底边和第六底边,所述第二矩形结构的第五底边与所述梯形结构的第二底边连接,且所述第二矩形结构的第五底边的长度与所述梯形结构的第二底边的长度相同。
优选地,所述梯形结构的第一底边和第二底边之间的间距为第一间距,所述第二矩形结构的第五底边与第六底边之间的间距为第三间距,所述第三间距不大于所述第一间距的五分之一。
优选地,所述梯形结构为等腰梯形结构;和/或;所述梯形结构的两侧腰与所述第二底边之间的夹角均小于90°。
优选地,所述梯形结构中的侧腰与所述第二底边的夹角范围为【60°,85°】。
优选地,所述阵元的数量为多个,且从馈线的中部到两侧,所述阵元的宽度相同或逐渐减小,所述阵元的宽度为在所述馈线的平行方向上,所述梯形结构中两条侧腰之间的间距。
优选地,所述阵元的数量为多个,且分布于所述馈线的两侧,且位于所述馈线的两侧的阵元交叉设置。
优选地,所述馈线上设有至少一个第三矩形结构,所述第三矩形结构与所述阵元一一对应,且所述第三矩形结构和与其对应的阵元位于所述馈线的两侧。
优选地,所述第三矩形结构的第一端与所述阵元的中轴线对齐,所述第三矩形结构的第一端和第二端之间的间距为【1/5,1/3】λ。
本发明还公开了一种雷达,包括PCB基板及天线,所述天线设置于所述PCB基板上,所述天线为上述水平极化天线。
本发明的水平极化天线中,阵元的长度为梯形结构中侧腰及第一底边到第二底边的高度,因此,本发明的阵元长度在一定的长度范围内,这使得本发明的水平极化天线带宽较宽,并且,在加工时,即使在梯形结构的第二底边的两端形成圆角,本阵元的谐振频率受到的影响也比较小,因此,本发明的水平极化天线可以实现较宽的带宽,且可以降低加工要求,进一步降低加工成本,应用本水平极化天线的雷达可以实现稳定探测。
另外,本水平极化天线中的阵元通过在梯形结构的两侧设置第一、第二矩形结构,便于在加工时快速准确地确定梯形结构的尺寸参数,从而进一步便于加工,有利于降低加工成本,且可以保证天线满足预设的要求,进一步保证雷达的探测性能。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
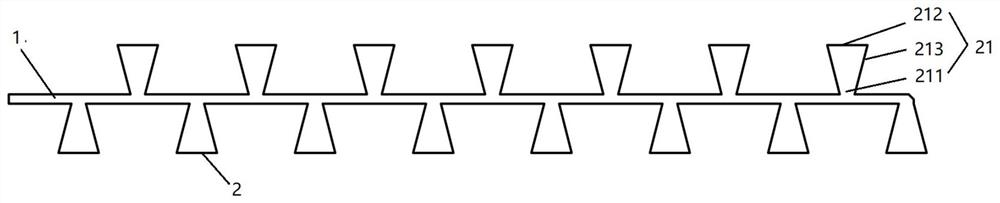
图1为本发明的一种水平极化天线的一种具体实施例;
图2为本发明的水平极化天线的另一种具体实施例;
图3为本发明的水平极化天线的另一种具体实施例中阵元的结构示意图;
图4为本发明的水平极化天线的另一种具体实施例;
图5为本发明的水平极化天线的另一种具体实施例;
图6为本发明的水平极化天线的另一种具体实施例。
在图中:
1-馈线;2-阵元;梯形结构21,第一底边211,第二底边212,侧腰213;第一矩形结构22,第三底边221,第四底边222,;第二矩形结构23,第五底边231,第六底边232;第三矩形结构3,第一端31,第二端32。
具体实施方式
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及实施例中的特征可以相互组合。
具体实施例一
如图1所示,本具体实施例公开了一种水平极化天线,包括一单根线阵,单根线阵包括一馈线1及多个阵元2,多个阵元2分布于馈线1的两侧,且位于馈线的两侧的阵元交叉设置。其中,阵元2包括梯形结构21,梯形结构21包括平行的第一底边211和第二底边212,第一底边211的长度小于第二底边212,第一底边211直接连接于馈线1,本实施例中的梯形结构21为一等腰梯形结,梯形结构21的侧腰与第二底边212之间的夹角小于90°,且梯形结构中的侧腰与第二底边的夹角在【60°,85°】范围内。
并且,在本实施例中,从馈线1的中部到两侧,阵元2的宽度相同,阵元2的宽度为在馈线的平行方向上,梯形结构中两条侧腰之间的间距,也可以说,沿着馈线的轴线方向,从中间到两边,阵元的宽窄保持不变。
在本实施例中,梯形结构中的垂线(即梯形结构中第一底边、第二底边之间的垂线)与馈线垂直。
本具体实施例中公开的水平极化天线中,梯形结构中侧腰213到第二底边212的高度在【0,H】范围内,第一底边211到第二底边212的高度为H,因此,阵元的长度在【0,H】范围内,由于水平极化天线的带宽与阵元的长度有关,而本实施例的阵元的长度在一个较宽的范围内,这使得水平极化天线带宽较宽。另外,在现有的阵元加工方式下,在阵元的尖角处会形成圆角,传统的阵元的谐振频率受到该加工圆角的影响,而本实施例中的阵元即使在尖角(即梯形结构的第二底边的两端)形成圆角,本阵元的谐振频率受影响也较小,仍然可以保持较宽的带宽。
因此,本发明的水平极化天线可以实现较宽的带宽,应用本水平极化天线的雷达可以实现稳定探测,并且,本发明的天线可以降低对加工的要求,进一步降低加工成本。
当然,在其他实施例中,水平极化天线的阵元中的梯形结构不一定是等腰梯形,还可以是直角梯形或其他结构;并且阵元的排列方式也可以根据实际需要进行调整;梯形结构中第一底边、第二底板的垂线与馈线不一定绝对垂直,可以有微小偏差,例如±5°之内的偏差;另外,水平极化天线的其他结构参数也可以根据实际情况调整,此处不再一一赘述。
具体实施例二
如图2、3所示,本具体实施例中的水平极化天线做了进一步的改进,相比于具体实施例一,本实施例中的天线中的阵元增加了第一矩形结构22和第二矩形结构23。具体的,梯形结构21通过第一矩形结构22连接于馈线1,第一矩形结构22包括平行设置的第三底边221和第四底边222,所述第一矩形结构22的第三底边221与所述馈线1连接,所述第一矩形结构22的第四底边222与所述梯形结构21的第一底边211连接,且所述第一矩形结构22的第四底边222的长度与所述梯形结构21的第一底边211的长度相同,也就是说,第一矩形结构22的两平行侧边之间的间距与梯形结构的第一底边的长度相同。
具体的,所述梯形结构的第一底边211和第二底边212之间的间距为第一间距,所述第一矩形结构的第三底边221与第四底边222之间的间距为第二间距,第二间距不大于第一间距的五分之一。
在进行加工时,可以通过测量第一矩形结构22的两侧边之间间距,从而确定梯形结构21的第一底边的长度211的长度,相比于具体实施例一,本实施例中梯形结构的第一底边的长度更容易得到精确测量,从而保证阵元的结构设计要求,并且加工成本较低。
具体的,本实施例中阵元中的梯形结构21的第二底边设有第二矩形结构23,第二矩形结构23包括平行设置的第五底边231和第六底边232,所述第二矩形结构23的第五底边231与所述梯形结构21的第二底边212连接,且所述第二矩形结构23的第五底边231的长度与所述梯形结构21的第二底边212的长度相同。
具体的,所述梯形结构21的第一底边211和第二底边212之间的间距为第一间距,所述第二矩形结构23的第五底边231与第六底边232之间的间距为第三间距,第三间距不大于第一间距的五分之一。
在进行加工时,可以通过测量第二矩形结构23的两侧边之间间距,从而确定梯形结构21的第二底边的长度212的长度,相比于具体实施例一,本实施例中梯形结构21的第二底边212的长度更容易得到精确测量,从而保证阵元的结构设计要求,并且加工成本较低。
需要说明的是图3中标号222、231指向的线条,仅是作为示意,从而使技术人员更形象地理解阵元的结构组成,在实际情况中,该线条可能不存在。
本具体实施例进一步降低了阵元的加工成本,使得水平天线的结构可以更好得满足预设的要求,进一步保证水平天线的良好性能,从而使运用该天线的雷达可以实现稳定探测。
在其他的具体实施例中,可以根据需要仅设置第一矩形结构或第二矩形结构,第一矩形结构和第二矩形结构的具体参数等可以根据实际进行调整。
具体实施例三
如图4所示,本具体实施例公开的水平极化天线在具体实施例二的基础上做了进一步改进,具体的,在本实施例中,天线中的阵元2的数量为多个,且多个阵元2分布于馈线1的两侧,且从馈线1的中部到两侧,阵元2的宽度逐渐减小,阵元2的宽度为在馈线的平行方向上,梯形结构中两条侧腰之间的间距,也可以说,沿着馈线的轴线方向,从中间到两边,阵元逐渐变窄。
本具体实施例中的水平极化天线不仅实现较宽的带宽,加工成本低,另外,由于阵元的在宽度方向上的变化,还可以调整馈入阵元的电流幅度,从而实现旁瓣的有效抑制。
在其他的具体实施例中,阵元的宽度变化可以根据需要适应性调整。
具体实施例四
如图5所示,本具体实施例公开水平极化天线的另外一种结构,相比于具体实施例一,本实施例中的水平极化天线中的馈线上设有多个第三矩形结构3,所述第三矩形结构3与所述阵元2一一对应,且所述第三矩形结构3和与其对应的阵元1位于所述馈线1的两侧。另外,所述第三矩形结构3的第一端31与所述阵元2的中轴线对齐,所述第三矩形结构3的第一端31和第二端32之间的间距为1/4λ,其中λ为波长,该波长由水平极化天线的工作频率决定。另外,阵元2的中轴线为阵元中垂直于馈线的对称轴。
本具体实施例中的水平极化天线不仅可以实现较宽的带宽,加工成本低,另外,,第三矩形结构的设置还可以调整馈入阵元的电流幅度,从而实现旁瓣的有效抑制。
在其他具体实施例中,矩形结构的第一端与阵元的中轴线不需要绝对对齐,也可以在具有一定的间距,第三矩形结构的第一端和第二端之间的间距可以在【1/5,1/3】λ范围进行具体选择和调整,此处不再一一赘述。
具体实施例五
如图6所示,本具体实施例公开水平极化天线的另外一种结构,相比于具体实施例三,在本实施例中的水平极化天线包括两个单根线阵,且两根馈线1中间的阵元2交叉设置。
具体实施例六
本具体实施例公开了一种雷达,包括PCB基板及天线,天线设置于所述PCB基板上,天线为具体实施例一至五中的任一水平极化天线。
须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
此外,虽然本文已经描述了说明性实施例,但是具有等效元件,修改,省略,组合(例如,跨各种实施例的方面),改编和/或改变的任何和所有实施例的范围,如本领域技术人员将理解的。基于本公开的技术。权利要求中的限制应基于权利要求中采用的语言广义地解释,并且不限于本说明书中描述的示例或者在申请的起诉期间。这些例子应被解释为非排他性的。此外,可以以任何方式修改所公开方法的步骤,包括通过重新排序步骤和/或插入或删除步骤。因此,意图是说明书和实施例仅被认为是说明性的,真正的范围和精神由所附权利要求及其等同物的全部范围表示。
- 一种水平极化/圆极化可重构船舶雷达天线
- 一种水平极化天线及雷达