跷板开关
文献发布时间:2023-06-19 10:32:14
技术领域
本申请是关于开关技术领域,尤其是关于一种跷板开关。
背景技术
跷板开关是一种比较常见的墙壁开关,通过按动跷板开关的按键,可以实现电路的通断。
跷板开关在结构上主要包括跷板、支撑件和出线端子等,跷板位于支撑件的顶部,支撑件的顶部作为跷板运动的支点,跷板的两端分别具有动触点,跷板的两个动触点处分别对应一个出线端子,每个出线端子的顶部具有与动触点对应的静触点。基于上述结构,跷板运动可以实现动触点和静触点的碰触,以实现所在电路的通断。
该跷板开关在行使通断功能时,动触点和静触点碰触以后,动触点并不会马上停止运动,会在静触点上弹跳若干次之后停止运动,而动触点每一次弹跳,都会在动触点和静触点之间引发电弧现象,长此以往将会严重缩短跷板开关的使用寿命。
发明内容
本申请提供了一种跷板开关,能够克服相关技术中存在的问题。所述技术方案如下:
根据本申请,提供了一种跷板开关,所述跷板开关包括跷板、过渡件、支撑件和两个出线端子;
所述跷板、所述过渡件和所述支撑件均位于所述两个出线端子之间,且所述过渡件的底部压紧在所述跷板的底部上表面,所述支撑件支撑在所述跷板的底部下表面;
所述跷板包括支撑板和两个动触板,所述两个动触板连接在所述跷板的两端,每个动触板的远离所述支撑板的位置处具有动触点,每个出线端子具有静触点,每个静触点位于同侧的动触点的圆周运动轨迹上;
每个动触点的动触面和同侧的静触点的静触面的位置相对,且每个动触点的动触面所在的平面和所述支撑板所在的平面之间具有第一夹角,每个静触点的静触面所在的平面和水平面之间具有第二夹角,所述第一夹角和所述第二夹角均大于0度且小于180度,且所述第一夹角、所述第二夹角和所述跷板的旋转角度之和为180度。
可选的,所述第一夹角和所述旋转角度之和大于等于90度且小于等于120度,所述第二夹角大于等于60度且小于等于90度。
可选的,所述第一夹角为90度,所述第二夹角大于0度且小于90度。
可选的,每个动触板的与所述过渡件相对的表面具有凸向所述过渡件的凸起结构;
所述凸起结构与所述跷板的支点之间的距离,大于所述过渡件的最远滑行位置与所述支点之间的距离,以使所述过渡件能够让处于粘连状态的动触点和静触点强制分离。
可选的,每个动触板为斜板;
所述凸起结构形成于所述斜板的与所述过渡件相对的表面。
可选的,每个动触板为弯折板,包括依次连接的第一竖板、横板和第二竖板;
所述第一竖板和所述支撑板相连,所述动触点位于所述第二竖板远离所述过渡件的表面;
所述凸起结构形成于所述第一竖板和所述横板的连接处。
可选的,每个动触点为通过冲压技术在所述动触板的远离所述过渡件表面形成的凸包结构。
可选的,每个出线端子包括出线端子本体和静触板,所述静触板为弯折板,包括水平部和倾斜部;
所述水平部水平位于所述出线端子本体的一侧,且与同侧的动触板的位置相对;
所述倾斜部连接在所述水平部远离所述出线端子本体的端部,所述静触点位于所述倾斜部的与同侧的动触点相对的表面;
所述水平部和所述倾斜部之间的连接处具有弹性。
可选的,所述支撑板的下表面具有一个或多个限位罩,所述支撑件的顶部具有一个或多个限位头,所述限位头位于所述限位罩中。
可选的,所述限位罩为八字型罩或球型罩。
本申请提供的技术方案带来的有益效果至少包括:
在本申请实施例中,该跷板开关的动触点和静触点位置相对,且动触点的动触面和支撑板之间具有第一夹角,静触点的静触面和水平面之间具有第二夹角,第一夹角和第二夹角均大于0度且小于180度,且第一夹角、第二夹角和跷板的旋转角度之和为180度。这样,静触点的静触面所在的平面相对于水平面呈倾斜状态,动触面所在的平面相对于支撑板所在的平面呈倾斜状态,能够在动触点与静触点碰触时减少竖直方向的速度。而动触点碰触到静触点时的竖直方向的速度一旦减少,可以减少动触点相对于静触点在竖直方向的弹跳次数,进而减弱动触点和静触点之间的拉弧现象,延长跷板开关的使用寿命。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。在附图中:
图1是根据实施例示出的一种跷板开关的结构示意图;
图2是根据实施例示出的一种跷板开关的结构示意图;
图3是根据实施例示出的一种跷板开关的限位罩和限位头的结构示意图;
图4是根据实施例示出的一种跷板开关的结构示意图;
图5是根据实施例示出的一种跷板开关的结构示意图;
图6是根据实施例示出的一种跷板开关的动触点和静触点碰触场景示意图;
图7是根据实施例示出的一种跷板开关的结构示意图;
图8是根据实施例示出的一种跷板开关的结构示意图;
图9是根据实施例示出的一种跷板开关的结构示意图;
图10是根据实施例示出的一种跷板开关的结构示意图;
图11是根据实施例示出的一种跷板开关的跷板的结构示意图。
图例说明
1、跷板;11、支撑板;111、限位罩;12、动触板;121、凸起结构;122、第一竖板;123、横板;124、第二竖板;13、动触点;131、动触面;
2、过渡件;21、T字型壳体;22、弹子;23、弹簧;
3、支撑件;31、限位头;
4、出线端子;41、静触点;42、出线端子本体;43、静触板;431、水平部;432、倾斜部;433、连接处;
5、进线端子。
通过上述附图,已示出本申请明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本申请构思的范围,而是通过参考特定实施例为本领域技术人员说明本申请的概念。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本申请相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本申请的一些方面相一致的装置和方法的例子。
本申请实施例提供了一种跷板开关,跷板开关是一种比较常见的墙壁开关,通过按动跷板开关的按键,可以实现电路的通断。
如图1所示,该跷板开关主要包括跷板1、过渡件2、支撑件3、两个出线端子4和进线端子5。跷板1、过渡件2和支撑件3均位于两个出线端子4之间,过渡件2的底部压紧在跷板1底部的上表面,支撑件3的顶部支撑在跷板1的底部下表面。过渡件2能够在跷板1的底部移动,过渡件2移动,可以促使跷板1以支撑件3的顶部为支点作圆周运动,使得跷板1的端部能够与同侧的出线端子4碰触,跷板1的端部和出线端子4碰触,可以实现开关的接通或者断开。原因如下:
跷板1和支撑件3均由导电材质制成,例如,均是由铜板制成,支撑件3和进线端子5固定连接,支撑件3的顶部和跷板1的底部下表面接触,实现跷板1、支撑件3和进线端子5依次电连接。而进线端子5和两个出线端子4均连接在跷板开关所在的线路中。可见,跷板1的端部的动触点13和出线端子4的静触点41碰触,能够实现跷板1、碰触的出线端子4、支撑件3和进线端子5所在的线路接通,或者,能够实现跷板1、未碰触的出线端子4、支撑件3和进线端子5所在的线路断开。所以,跷板1的动触点13和出线端子4的静触点41碰触,可以实现开关的接通或者断开。
由上述可见,跷板开关在使用中,跷板1的动触点13和出线端子4的静触点41会发生多次碰触,而每一次碰触中,由于跷板1的动触点13落在出线端子4的静触点41上时,具有比较大的速度,那么跷板1的动触点13和出线端子4的静触点41碰触后,跷板1的动触点13不会立即停止在出线端子4的静触点41上,而是在出线端子4的静触点41上多次弹跳以后,停止在出线端子4的静触点41上。跷板1这样在出线端子4上反复多次弹跳,跷板1的动触点13和出线端子4的静触点41之间的电压会将空气击穿,而产生拉弧现象。其中,跷板1的动触点13在出线端子4的静触点41上弹跳的频率越多,拉弧现象越严重,长期以往将会缩短该跷板开关的使用寿命。
而且,跷板1的动触点13和出线端子4的静触点41之间产生拉弧,长期以往,动触点13和静触点41上都会具有积碳,而积碳将会影响动触点13和静触点41之间的连接。
基于上述问题,本实施例提供了一种跷板开关,该跷板开关能够减少动触点13在静触点41上弹跳的次数,减少拉弧现象,提升跷板开关的使用寿命,而且还能减少动触点13和静触点41的表面上的积碳,保障动触点13和静触点41之间接触良好。
如图2所示,该跷板开关包括跷板1、过渡件2、支撑件3和两个出线端子4;跷板1、过渡件2和支撑件3均位于两个出线端子4之间,且过渡件2的底部压紧在跷板1的底部上表面,支撑件3支撑在跷板1的底部下表面。
例如,跷板1包括支撑板11和两个动触板12,两个动触板12连接在跷板11的两端,过渡件2的底部压紧在支撑板11的上表面,且能够沿着支撑板11滑行,支撑件3的顶部支撑在支撑板11的下表面,支撑件3的顶部和支撑板11的连接处为跷板1的动触点12作圆周运动的支点。
其中,过渡件2的底部压紧在支撑板11的上表面,并且能够在支撑板11上滑行,过渡件2的底部沿着支撑板11滑行中,始终保持和支撑板11的上表面相接触。
如图2所示,过渡件2包括T字型壳体21、弹子22和弹簧23,T字型壳体21的竖向壳体具有腔室,弹簧23压缩固定在腔室中,弹子22位于腔室中且和弹簧23相连,弹子22的底部伸出于腔室的底部与支撑板11的上表面接触。这样,弹子22在弹簧23的弹力下,始终与支撑板11的上表面保持接触状态。
为了限制跷板1的运动自由度,如图2所示,支撑板11的下表面具有一个或多个限位罩111,支撑件3的顶部具有一个或多个限位头31,限位罩111和限位头31一一对应,限位罩111和限位头31相适配,限位头31位于限位罩111中。其中,限位头31位于限位罩111中,能够限制跷板1的左右移动。
如图1所示,为了进一步限制跷板1的运动自由度,限位罩111和限位头31的数量均为至少两个。如图1所示,限位罩111和限位头31的数量均为两个,支撑板11具有一定的宽度,支撑件3具有一定的长度,支撑板11的下表面沿着宽度方向布置两个限位罩111,支撑件3的顶部沿着长度方向布置两个限位头31,两个限位罩111的位置和两个限位头31的位置相对,以便于每个限位头31都能够位于一个限位罩111中。
跷板1和支撑件3之间通过两个限位罩111和两个限位头31的配合,能够限制跷板1沿着支撑件3的长度方向翻转运动。
如图1所示,跷板1在竖直方向由过渡件1和支撑件3限制,避免跷板1发生上下移动,在水平方向由限位罩111和限位头31的配合限制,避免跷板1发生左右移动,在前后方向由多个限位罩111和多个限位头31的配合限制,避免跷板1发生前后翻转运动。这样跷板1可以稳定的绕着支点作圆周运动。
其中,如图1所示,可以以沿着支撑板3高度方向记为竖直方向,也是z轴方向;以沿着支撑板3长度方向记为前后方向,也是y轴方向;以垂直于支撑板3的方向记为水平方向,也是x轴方向。
如图2所示,限位罩111可以为八字型罩,限位罩111的内表面为弧形曲面,限位头31的外表面也为弧形曲面,以便于跷板1作圆周运动。
限位罩111的数量可以是一个或多个,限位头31的数量也可以是一个或多个。一个限位罩111和一个限位头31的方案中,如图1所示,限位罩111沿着y轴的长度可以比较长,限位头31沿着y轴方向也具有一定的长度,限位头31位于限位罩111中,这样能够限制跷板1在y轴方向发生翻转运动。
多个限位罩111和一个限位头31的方案中,如图1所示,多个限位罩111沿着y轴方向布置在支撑板11的下表面,一个限位头31沿着y轴方向具有长度,且限位头31的长度大于或者等于多个限位罩111在y轴方向的总长度,这样,多个限位罩111都能够罩在限位头31上,这样能够很好的限制跷板1在y轴方向发生翻转运动。
当然,多个限位罩111和多个限位头31的方案中,多个限位罩111沿着y轴方向布置在支撑板11的下表面,多个限位头31沿着y轴方向布置在支撑件3的顶部,每个限位头31位于各个限位罩111中,这样也能够很好的限制跷板1在y轴方向发生翻转运动。
其中,本实施例对限位罩111和限位头31的数量不做限定,技术人员可以根据实际情况,灵活选择。
如图3所示,限位罩111为球形罩,限位头31也可以为球形结构的结构示意图。该结构的限位罩111和限位头31,能够限制跷板1在水平方向左右移动,以及竖直方向上下移动,而为了限制跷板1在前后方向翻转运动,相应的,该结构中,限位罩111的数量为至少两个,限位头31的数量也为至少两个。
其中,球形罩的限位罩111的球心处的直径稍微大于限位头31的球心处的直径,限位罩111的罩口处的直径稍微小于限位头31的球心处的直径,限位头31可以过盈安装在限位罩111中。
或者,限位罩111为括号型罩,限位头31过盈安装在限位罩111中,限位罩111的数量为一个或多个,限位头31的数量为一个或多个。其中,限位罩111和限位头31均为一个的方案、限位罩111为多个,限位头31为一个的方案,以及限位罩111和限位头31均为多个的方案,可以参见上述所述,此处不再一一赘述。
其中,本实施例对限位罩111的具体形状不做限定,技术人员可以根据实际情况,灵活选择。
如图1所示,支撑件3可以是条形板,支撑件3靠近端部位置与进线端子5固定连接,支撑件3位于两个出线端子4之间,支撑件3在对应出线端子4的位置处的顶部对折形成限位头31,这种通过对折形成的限位头31,其外表面为弧形曲面,以便于和限位罩111的内表面的弧形曲面配合,方便跷板1作圆周运动。
其中,本实施例对限位罩111和限位头31的具体形状均不做限定,能够实现限位罩111和限位头31的配合,限制跷板1在水平方向上左右移动,跷板1在前后方向翻转运动即可。
如图2所示,过渡件2的弹子22虽然保持压紧在支撑板11的上表面,但是由于弹子22能够在弹簧23的伸缩下上下移动,那么跷板1在竖直方向上的速度会加剧跷板1的弹跳次数,那么为了减少跷板1的弹跳次数,主要在于减少动触点13和静触点41碰触时,动触点13在竖直方向上的速度。
下面将介绍跷板1的具体结构以及减少动触点12和静触点41碰触时动触点13在竖直方向的速度的实现结构。
如图2所示,两个动触板12连接在支撑板11的两端,每个动触板12的远离支撑板11的位置处具有动触点13,每个动触点13远离过渡件2的位置具有动触面131。
其中,如图2所示,动触面131为远离过渡件2的表面,如图4所示,动触面131为远离过渡件2的位置处的切平面。
如图2所示,每个出线端子4具有静触点41,且每个静触点41位于同侧的动触点13的圆周运动轨迹上,每个静触点41邻近动触点13的位置具有静触面411,其中,静触面411可以是如图2所示的邻近动触点13的表面,也可以是邻近动触点13的位置处的切平面。
其中,本实施例对动触点13的动触面131的具体形成方式,以及静触点41的静触面411的具体形成方式,均不做限定。
其中,每个静触点41位于同侧的动触点13的圆周运动轨迹上,以便于跷板1的两个动触点13绕着支点作圆周运动中,能够与同侧的静触点41碰触。
如图2所示,每个动触点13的动触面131和同侧的静触点41的静触面411的位置相对,以便于跷板1作圆周运动中,动触点13与静触点41碰触时,如图5所示,动触点13的动触面131能和同侧的静触点41的静触面411重合。
继续参考图2所示,每个动触点13的动触面131所在的平面和支撑板11所在的平面之间具有第一夹角,每个静触点41的静触面411所在的平面和水平面之间具有第二夹角,第一夹角和第二夹角均大于0度且小于180度,且第一夹角、第二夹角和跷板1的旋转角度之和为180度。
其中,图2中α表示第一夹角,β表示第二夹角,γ表示动触面131和静触面411重合时,跷板1作圆周运动发生的旋转角度。
为了使静触面411相对于水平面呈倾斜状态,相应的,β从0至180度之间取值,且不包括0度和180度。由于动触点13和静触点41碰触时,如图5所示,动触面131和静触面411发生重合,故α、β和γ三者之和为180度,那么,α从180度至0度之间取值,且不包括180度和0度。
如图5所示,静触面411所在的平面相对于水平面呈倾斜状态,动触面131所在的平面相对于支撑板11所在的平面呈倾斜状态,能够减少动触点13与静触点41碰触时,在竖直方向的速度。而动触点13碰触到静触点41时的竖直方向的速度一旦减少,便可以减少动触点13相对于静触点41的弹跳次数,进而减弱动触点13和静触点41之间的拉弧现象。
如图6中(a)所示,静触面411所在片面和水平面之间的夹角为0度,那么,动触点13与静触点41碰触时,动触点13在竖直方向的速度为v。而如图6中(b)所示,动触点13与静触点41碰触时,动触点13在竖直方向的速度为v1=v·sinθ。在同等条件下,也即是,动触点13刚碰触到静触点41时的速度相等的条件下,如图6(b)所示的结构中,动触点13在竖直方向的速度小于,如图6(a)所示的结构中,动触点13在竖直方向的速度。
其中,如图6中(b)所示,动触点13与静触点41碰触时,在水平方向的速度v2=v·cosθ,由于如图5所示的限位罩111和限位头31的配合限制作用,使v2降为0,避免跷板1在水平方向上左右弹跳。
如图5所示,动触点13与静触点41碰触时,在限位头31位于限位罩111中限制跷板1在水平方向左右移动的基础上,配合动触点13在竖直方向的速度减少,进而能够减少动触点13在静触点41上弹跳的次数,从而能够减弱动触点13和静触点41之间的拉弧现象,延长该跷板开关的使用寿命。
而且,又由于静触点41的静触面411所在的平面与水平面之间具有夹角,呈倾斜状态,动触点13的动触面131所在的平面与支撑板11之间具有夹角,呈倾斜状态,使得静触面411和动触面131上的积碳容易滑落下来,进而能够减少静触面411和动触面131上的积碳,确保静触面411和动触面131接触良好。
关于动触面131相对于支撑板11的倾斜角度,以及静触面411相对于水平面的倾斜角度,技术人员可以根据实际情况设定,以实现动触点13在静触点41上弹跳次数最少,动触面131和静触面411最容易滑落积碳为原则,选择合适的角度。
例如,第一夹角α和旋转角度γ之和大于等于90度且小于等于120度,第二夹角β大于等于60度且小于等于90度。
示例性地,如图5所示,第二夹角β为60度时,第一夹角α和旋转角度γ之和为120度。如图7所示,第二夹角β为90度时,第一夹角α和旋转角度γ之和为90度。
又例如,如图8所示,第一夹角α为90度,第二夹角β和旋转角度γ之和为90度,第二夹角β大于0度且小于90度。
技术人员可以根据动触点13和静触点41碰触时,动触点13弹跳次数最少,动触面131和静触面411上的积碳最容易滑落,动触点13和静触点41分离的最远距离满足大于或者等于3毫米等参数,选择第一夹角α、第二夹角β和旋转角度γ。
为了进一步减少动触点13的弹跳次数,相应的,如图8所示,每个出线端子4包括出线端子本体42和静触板43,静触板43为弯折板,包括水平部431和倾斜部432;水平部431水平位于出线端子本体42的一侧,且与同侧的动触板12的位置相对;倾斜部432连接在水平部431远离出线端子本体42的端部,静触点41位于倾斜部432的与同侧的动触点13相对的表面;水平部431和倾斜部432之间的连接处433具有弹性。
其中,静触板43在材质上可以是金属,例如,可以是铜片等。
如图8所示,静触板43在结构上具有弯折性,包括水平部431和倾斜部432,水平部431用于与出线端子本体42固定连接,倾斜部432用于承载静触点41,例如,倾斜部432的与同侧的动触点13相对的表面具有静触点41。
如上述所述,静触点41的静触面411所在的平面和水平面之间具有第二夹角,而倾斜部432可以与静触面411相平行,所以,倾斜部432所在的平面和水平面之间的夹角也可以为第二夹角。
其中,水平部431和倾斜部432的连接处433具有弹性,弹性一方面来自于静触板43的金属材质的延展性,另一方面来自于静触板43的弯折结构。
这样,由于水平部431和倾斜部432的连接处433具有弹性,使得当动触板12碰触到倾斜部432时,动触板12并不会立即从倾斜部432上反弹,而是会继续以连接处433为圆点,作圆周运动直到速度变为零,才会在倾斜部432的推动下反弹。可见,动触板12和倾斜部432的碰触属于柔性碰触,动触板12朝向同侧的出线端子本体42作圆周运动时,会消耗速度,一旦速度降低,动触点13在静触点41上的弹跳次数便也可以减少,进而能够减弱动触点13和静触点41之间的拉弧现象。
其中,粘连故障是开关部件比较常见的失效方式,粘连故障也即是动触点13和静触点41发生粘连,无法分离的故障,为减少甚至避免该跷板开关出现粘连故障,相应的实现结构可以如下:
如图9所示,每个动触板12的与过渡件2相对的表面具有凸向过渡件2的凸起结构121;凸起结构121与跷板1的支点之间的距离,大于过渡件2的最远滑行位置与支点之间的距离,以使过渡件2能够让处于粘连状态的动触点13和静触点41强制分离。
其中,如图9所示,动触板12可以相对支撑板11倾斜的斜板,凸起结构121可以形成于斜板的与过渡件2相对的表面。
图9中的位置O为跷板1作圆周运动的支点,位置A为过渡件2在支撑板11上滑行的最远位置,位于B为凸起结构121最先与过渡件2接触的位置。线段OB之间的距离b大于线段OA之间的距离a。这样,当动触点13和静触点41发生粘连故障,过渡件2与凸起结构121的位置B接触,在位置B处向跷板1施加作用力,与在位置A处向跷板1施加作用力相比,显然同样大小的作用力,力臂变大,那么过渡件2向跷板1施加的力矩增大,能够让动触点13和静触点41强制分离。
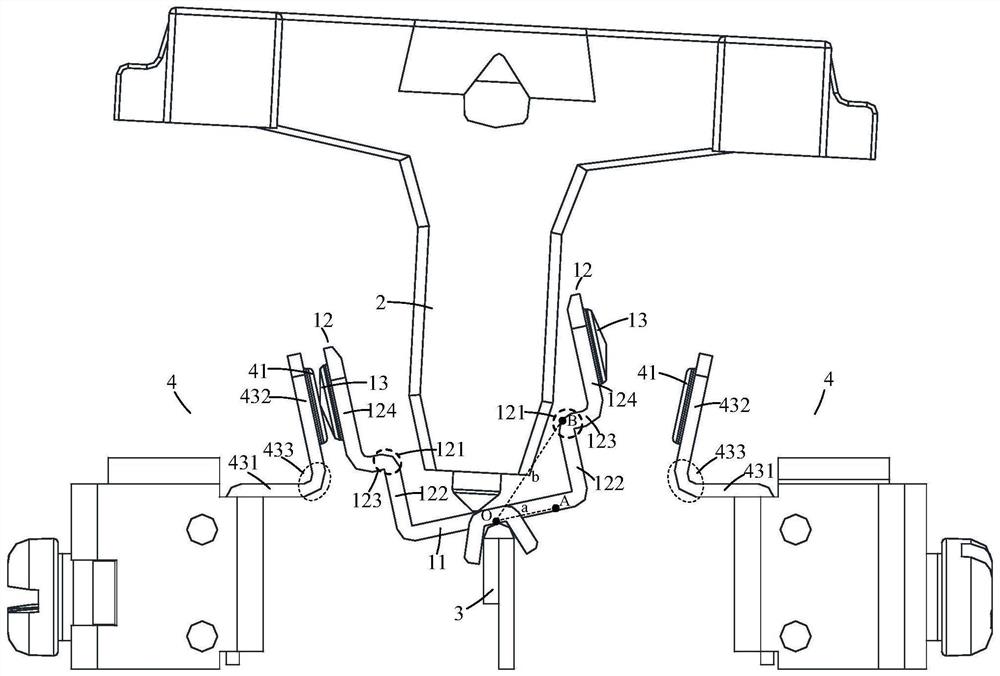
凸起结构121的另一种形成方式也可以是,如图10所示,每个动触板12为弯折板,包括依次连接的第一竖板122、横板123和第二竖板124;第一竖板122和支撑板11相连,动触点13位于第二竖板124远离过渡件2的表面;凸起结构121形成于第一竖板122和横板123的连接处。
如图10所示,第二竖板124用于作为动触点13的载体,动触点13的动触面131所在的平面与支撑板11所在的平面之间具有第一夹角,第二竖板124所在的平面可以与动触面131所在的平面平行,所以,第二竖板123和支撑板11之间的夹角也可以为第一夹角。
如图10所示,第一竖板122用于与支撑板11相连,横板123用于形成凸起结构121。示例性地,两个第二竖板124之间的距离大于两个第一竖板122之间的距离,连接在第一竖板122和第二竖板124之间的横板123,在横板123和第一竖板122之间的连接处可以形成凸起结构121。
上述结构的动触板12,能够形成凸起结构121,如图10所示,支点O和凸起结构121的最先碰触到过渡件2的位置B之间的距离b,大于支点O与过渡件2在支撑板11上的最远滑行位置A之间的距离a,也即是,线段OB的长度b大于线段OA的长度a。进而,动触点13和静触点41发生粘连时,过渡件2能通过位置B压着跷板1,使动触点13和静触点41强制分离。
其中,关于凸起结构121的形成方式以及形成位置,本实施例不做具体限定,能够实现强制分离功能即可,即动触点13和静触点41粘连时,过渡件2能够以凸起结构121为作用点,使动触点13和静触点41强制分离。
在一种示例中,动触点13和静触点41均为实现电连接的导电部,例如,可以是涂覆有银层的导电体,例如,可以按照如图9所示的方式分别形成于出线端子本体42和动触板12。
又例如,如图11所示,每个动触点13为通过冲压技术在动触板12的远离过渡件2表面形成的凸包结构。
示例性地,可以通过冲压技术在动触板12的远离过渡件2的表面形成凸包结构,然后再在凸包结构的外表面涂覆银层,得到动触点13。同样,对于静触点41也可以是通过冲压技术在静触板43的倾斜部432的表面形成凸包结构。
这种通过冲压技术形成的凸包结构,与通过焊接或者铆接形成凸起结构相比,能够避免焊接或者铆接产生的空气间隙,进而能够提升动触点13和静触点41之间的良好接触。
基于上述结构所示,参考如图10所示,由于动触点13的动触面131和支撑板11之间具有第一夹角,静触点41的静触面411和水平面之间具有第二夹角,静触面411相对于水平面呈倾斜状态,动触点13与静触点41碰触时,动触面131也相对于水平面呈倾斜状态。这样,可以参考图6所示,动触点13与静触点41碰触时,动触点13在竖直方向的速度,和动触点13竖直落在静触点41相比,明显减少。其中,动触点13竖直落在静触点41上,动触点13在竖直方向的速度为v,而动触点13按照如图6中(b)所示落在静触点41上,动触点13在竖直方向的速度为v·sinθ,明显小于v。再配合限位罩111和限位头31的限制,进而能够减少动触点13在静触点41上的碰触次数,减弱动触点13和静触点41之间的拉弧现象,有利于延长跷板开关的使用寿命。
另外,由于静触点41的静触面411和水平面之间具有第二夹角,静触面411相对于水平面呈倾斜状态,动触点13与静触点41碰触时,动触面131也相对于水平面呈倾斜状态。这样能够使动触面131和静触面411上的积碳比较容易滑落,保持动触面131和静触面411表面上的清洁性,提高动触面131和静触面411的接触良好性。
另外,又由于静触板43为弯折板,弯折的连接处433具有弹性,使得动触板12与静触板43之间的碰触为柔性碰触,减少动触板12从静触板43反弹时的反弹速度,而反弹速度一旦降低,便能够减少动触板12在静触板43上的弹跳次数,进而减弱动触点13和静触点41之间的拉弧现象,有利于延长跷板开关的使用寿命。
另外,又由于动触板12包括第一竖板122、横板123和第二竖板124,第一竖板122和横板123之间的连接处能够形成凸向过渡件2的凸起结构121,使得动触点13和静触点41之间发生粘连故障时,过渡件2能够在凸起结构121处,向跷板1施加作用力,使动触点13和静触点41强制分离。
另外,又由于动触点13是通过冲压技术在动触板12表面上形成的凸包结构,而非铆接结构,可以减少甚至避免动触点13内部出现空气空隙,而导致接触不良的现象。例如,如果动触点13的形成为,首先通过铆接在动触板12表面形成铆接结构,然后在铆接结构焊接银层,要经历两次焊接,那么动触点13具有空隙的概率更大。而如果动触点13的形成为,首先通过冲压技术在动触板12表面形成凸包结构,然后在凸包结构表面焊接银层,减少焊接方式,那么动触点13具有空隙的概率更小。
在本申请实施例中,该跷板开关的动触点和静触点位置相对,且动触点的动触面和支撑板之间具有第一夹角,静触点的静触面和水平面之间具有第二夹角,第一夹角和第二夹角均大于0度且小于180度,且第一夹角、第二夹角和跷板的旋转角度之和为180度。这样,静触点的静触面所在的平面相对于水平面呈倾斜状态,动触面所在的平面相对于支撑板所在的平面呈倾斜状态,能够在动触点与静触点碰触时减少竖直方向的速度。而动触点碰触到静触点时的竖直方向的速度一旦减少,可以减少动触点相对于静触点在竖直方向的弹跳次数,进而减弱动触点和静触点之间的拉弧现象。
应当理解的是,本申请并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本申请的范围仅由所附的权利要求来限制。
- 具有门开关或房间开关的操纵跷板的跷板支架
- 具有至少一个住房通讯系统的门开关或房间开关的操纵跷板的跷板支架