一种基于机器视觉的放射库盖板落放误差自动纠正方法
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及放射源库桥式起重机吊运领域,具体涉及一种矩形盖板落放误差的检测纠正方法。
背景技术
随着近几十年石油勘探、无损检验等事业的高速发展,许多地区用源单位产生了不同形态的废放射源,数量大且种类多。由于废放射源中的高能射线对环境和人体都会造成不同程度的危害,因此必须严格管理,用源单位需要将废放射源送交其所在区域环保部门所属的城市放射性废物库。针对放射源库中的矩形水泥盖板,工程上为达到理想的防辐射屏蔽效果,通常在设计中盖板与坑位之间的合盖间隙为毫米级(不超过1cm),同时由于盖板的水泥浇筑不均匀会导致其整体重心偏移,这种情况极易造成起重机抓盖时负载不均衡导致的盖板位姿歪斜而无法合盖的问题。对于这一问题,当前基本是依赖操作员手动操作,调整歪斜盖板的角度和位置进行纠正,以确保盖板能顺利合上。但是对于放射源库这一具有高辐射性的特殊工况,实际作业依赖于现场人工纠正具有一定的危险性,并且效率低,所以实现放射源库起重机自动化作业具有非常重要的意义。
为了达到观察者与被观察对象无实际接触的安全目的和高度自动化的要求,机器视觉作为一种代替人眼反馈过程中需要理解的视觉信息的技术已被广泛应用。机器视觉不仅在吊运系统定位工作中扮演重要角色,在解决实际工程中遇到的如负载不均衡导致的盖板歪斜偏差问题也能发挥其积极作用。核用起重机的绝对定位精度通常需要达到±3mm的高标准,而上述提到的盖板位姿歪斜问题会严重影响其盖板落放时的定位精度,直接导致放射源库盖板无法顺利合上。如何利用视觉技术实现放射源库中矩形盖板因位姿歪斜无法合盖的自动纠正,已成为起重机自动化技术领域一个亟待解决的问题。
发明内容
发明目的:本发明提出一种基于机器视觉的放射库盖板落放误差自动纠正方法,解决放射源库中因起重机抓具负载不均衡导致的矩形盖板歪斜落放卡边的问题。
技术方案:一种基于机器视觉的放射库盖板落放误差自动纠正方法,包括以下步骤:
(1)在放射源库矩形盖板上方两角侧位置和起重机抓具正前侧添加标识圆,并且确保盖板上两圆圆心连线与盖板边线平行,负载时抓具标识圆圆心位于盖板两圆位置的中心轴线上;
(2)在起重机抓具硬臂上方侧边固定一工业相机,确保镜头与地面平行,在观察视野内能够看到抓具和盖板上的标识圆;
(3)放射性废物桶入库需要抓盖前,利用视觉圆检测算法对盖板上的标识圆进行识别定位,在像素坐标系中,记一侧圆心坐标为(
(4)完成放射性废物桶入库操作后,当起重机抓取盖板至落放位置时,测量盖板上两侧标识圆圆心坐标(
(5)根据初始角度α和当前角度β计算需要纠正的偏移角度值θ=β-α,将θ作为角度纠正参数反馈至控制系统,通过起重机旋转机构纠正偏移角度;
(6)当盖板高度下落至预设的观察高度阈值
(7)当判断到盖板发生卡边时进行调整,将盖板起升至安全高度后根据卡边偏向给予位移点动纠正,再次落放直至顺利合盖。
作为一种优选的实施方式,所述步骤(6)中测算盖板两侧标识圆至抓具标识圆之间的横向观察距离变化率,并根据两侧观察距离变化率的对比情况判断盖板是否发生卡边包括:
记像素平面上盖板两侧标识圆圆心坐标分别为(
根据
根据下式执行计算,观察盖板AB两侧高度观察距离的变化趋势:
其中
作为优选的实施方式,所述根据
式中,
作为优选的实施方式,所述步骤(7)包括:
当判断到卡边情况时,向控制系统的主控PLC发出急停命令字,令起升机构停止下降动作,并缓慢上升至安全高度;
根据
点动调整后等待一段时间至盖板无摇晃状态,再次落放盖板,若再次卡边则返回步骤(6)继续调整,若无卡边状态发生则顺利合盖结束流程。
有益效果:本发明所提供的基于视觉的放射源库矩形盖板落放误差自动纠正方法,利用机器视觉技术,能够准确测量盖板偏斜的角度,并能辅助判断盖板落放卡边时的偏向,帮助对其纠正。本方法能够实现负载时盖板的歪斜角度及位置自动调整,确保盖板落放顺利合盖,调整精度高,成本低,同时具有安全、可靠、高效等优点,具有重大的实用价值。
附图说明
图1为理想情况下起重机负载的示意图,其中(a)为起重机负载时的主视图,(b)为起重机负载时的侧视图,(c)为工业相机视角下起重机负载时的俯视图;
图2为盖板落放卡边的示意图,其中(a)为盖板落放顺利合盖时的理想情况,(b)为盖板吊点定位偏右造成落放时单侧卡边的情况,虚线框中为盖板右侧刮蹭到坑位边缘的情况;
图3为工业相机视角下,盖板与抓具标识圆之间的相对关系示意图,其中(a)为测量盖板角度的示意图,(b)为检测盖板倾斜情况的示意图;
图4为正视图视角下盖板落放卡边过程中位姿的几何关系示意图;
图5为判断盖板落放卡边情况时盖板透过相机镜片至感光平面的映射关系示意图;
图6为盖板两侧基准点高度观察距离的变化趋势曲线图;
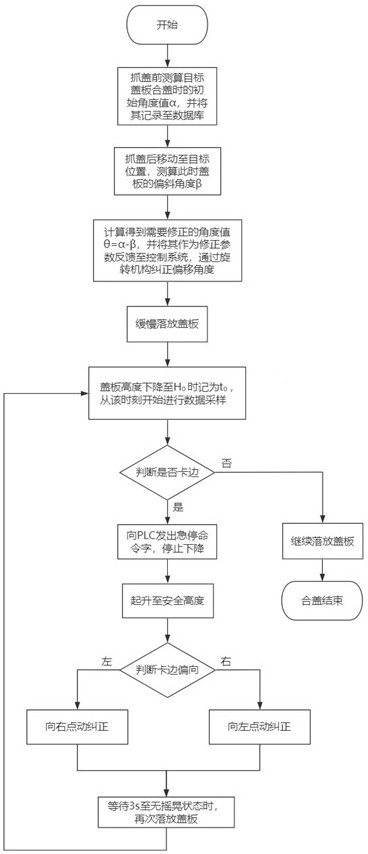
图7为基于本发明的盖板落放误差自动检测和纠正方法的一个实施例的流程框图。
具体实施方式
下面结合附图对本发明的技术方案作进一步说明。
本发明实施例提出一种基于机器视觉的放射库盖板落放误差自动纠正方法,基于一个包括大车、小车、WCS编码尺、起重臂、起升机构、起升机构编码器、旋转机构、抓具、工业相机、标识圆和上位机的检测和纠正系统。其中,工业相机安装于起重臂一侧,镜头平行于地面,能确保清晰地看到起重机抓具和标识圆;标识圆分别设置于矩形盖板上方两角侧和抓具正前方,作为视觉识别定位的基准。
图1为理想情况下起重机负载的示意图,其中(a)为起重机负载时的主视图,标号1为起升机构,负责控制抓具的起升活动调整其高度位置;标号2为旋转机构,负载控制抓具的旋转角度;标号3为一种四爪型抓具,用于抓取矩形水泥盖板;标号4为矩形水泥盖板。(b)为起重机负载时的侧视图,其中矩形水泥盖板和坑位的两侧轮廓均为阶梯型设计,具有较好的密封性和一定程度上的落放导向作用;标号5为工业相机,其镜头平行于地面,能确保清晰地观察到起重机抓具和标识圆;标号6为设置于抓具上的标识圆,作为对抓具进行视觉识别定位的基准。图(c)为工业相机视角下起重机负载时的俯视图,其中标号7为设置于矩形盖板上方两侧的标识圆,作为对盖板位姿检测的基准,以上所述标识圆要求与环境背景色对比度大,利于图像识别分析。
根据本发明的一实施例,放射性废物桶入库前,操作员需要在上位机软件中查询并选择具有空间的坑位,然后根据数据库中给出的坑位吊点坐标信息控制大小车行至相应位置,将盖板抓取放置一侧,待废物桶入库后再将盖板抓取放回至原坑位吊点坐标位置,将其合盖。为避免长久使用后镜头的歪斜对于盖板位姿测量造成的误差,工程中通过测算盖板角度的相对偏移量来进行纠正。以废物桶入库前盖板合盖时的位置为一基准,利用视觉圆检测算法对矩形盖板上的标识圆进行识别定位。在像素坐标系中,记盖板左侧圆心坐标为(
根据本发明的一实施例,由图2解释性地说明了盖板落放卡边的情况,其中垂直虚线为坑位落放点的中轴线,可以根据抓具吊点与该参考线的相对位置判断落放点是否理想,其中左侧图(a)为盖板落放顺利合盖时的理想情况,而右侧图(b)为盖板吊点定位偏右造成落放时单侧卡边的情况,虚线框中为盖板右侧刮蹭到坑位边缘的情况,此时会导致无法合盖的问题。针对这一问题,首先可以建立起数学模型,如图4和图5所示,其中图4为正视图视角下盖板落放卡边过程中位姿的几何关系示意图,图5为盖板透过相机镜片至感光平面的映射关系示意图。记落放过程中的某一时刻为
图2(b)对应的数学几何关系如图4所示,反映的是盖板落放卡边的一个过程变化,其中中间的垂直虚线为一条过抓具标识圆圆心的中轴线(此处假设相机光心与抓具标识圆圆心在同一条中轴线上,若实际情况不符合亦不影响下述方法的结论)。由公式(1)可知,可以根据像素物理距离
以图5中A、B两点高度变化为例进行具体分析,其中焦距
其中
实际情况中,由于盖板长度较大,而倾斜角
通过反复实验可以观察到,当出现图2(a)中盖板顺利合盖的情况时,
根据本发明的一实施例,在盖板偏移角度纠正之后,控制系统将其缓慢落放,在这一过程中,选取一高度阈值
为了更清楚地了解盖板左右两侧高度观察距离的变化趋势,定义如下三条观察曲线:
其中
根据本发明的一个实施例,参照图7,基于机器视觉的放射库盖板落放误差自动纠正方法的具体实施步骤如下:
(1)在放射源库矩形盖板上方两角侧位置和起重机抓具正前侧添加与环境背景色对比度较大的标识圆,并且确保盖板上两圆圆心连线与盖板边线平行,负载时抓具标识圆圆心位于盖板两圆位置的中心轴线上;
(2)在起重机抓具硬臂上方侧边固定一工业相机,确保镜头与地面平行,在观察视野内能够清晰的看到抓具和目标盖板上的标识圆;
(3)放射性废物桶入库需要抓盖前,利用视觉圆检测算法对矩形盖板上的标识圆进行识别定位,记左侧圆心坐标为(
(4)完成放射性废物桶入库操作后,需要将其盖板落放回对应坑位,如图3(a)所示抓具负载时由于负载不均衡已经造成盖板歪斜。针对这一角度偏移误差,同样利用上述方法测量左右两侧圆心坐标在x与y轴方向上的差值
(5)此时可通过比较原先数据库中存储的合盖角度信息计算得到需要纠正的角度值
(6)当起重机抓具将盖板移动到对应坑位上方时,以缓慢的速度将其落放,在盖板最低处距离坑位约600mm处设定为一观察高度阈值
(7)从落放过程达到高度
(8)设一判断阈值
(9)当判断到卡边情况时,立即向主控PLC发出急停命令字,令起升机构停止下降动作,并缓慢上升至安全高度;
(10)根据
(11)然后根据卡边偏向情况,给予其相反的位移补偿点动,可以根据实际情况调整点动距离,通常将其设为2mm。
(12)点动调整后等待一段时间如3s至盖板无摇晃状态,然后再次落放盖板,若再次卡边则返回步骤(7)继续调整,若无卡边状态发生则顺利合盖结束流程。
本发明提出的基于机器视觉的放射库盖板落放误差自动纠正方法,通过在放射源库矩形盖板上方两角侧位置和起重机抓具正前侧添加标识圆,利用固定在起重机抓具硬臂上方侧边的工业相机获取标识圆的位置,在抓盖和落盖过程中利用视觉圆检测算法对盖板和抓具上的标识圆进行识别定位,实时准确测量盖板偏斜的角度,并能辅助判断盖板落放卡边时的偏向,帮助对其纠正,能够有效解决核用桥式起重机负载时盖板歪斜导致的无法合盖问题,角度调整精度和盖板落放卡边情况的检测敏感程度高,并具有安全、可靠、自动化程度高等优点,具有重大的实用价值。
- 一种基于机器视觉的放射库盖板落放误差自动纠正方法
- 一种基于机器视觉的放射库盖板落放误差自动纠正方法