一种可拼接多旋翼运输无人机
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及一种无人机设备,更具体的说是一种可拼接多旋翼运输无人机。
背景技术
随着国内自动化信息技术水平的不断提升,国内智能物流行业应运而生,传统的普通运输无法满足日益增长的物流需求,无人机运输行业正飞速发展,但无人机载重能力有限,对于重量较大物品难以完成运输任务,将无人机框架设计成可拼接形式,可应对不同载荷进行灵活拼接,因此设计了这种可拼接多旋翼运输无人机。
发明内容
本发明主要解决的技术问题是提供一种可拼接多旋翼运输无人机,设备能够在意外坠落时保护无人机,设备能够调节运输挂钩升降且挂钩能够自锁,设备能够调节摄像镜头角度,设备能够飞行,设备能够与多台设备拼接,设备能够平稳降落。
为解决上述技术问题,本发明涉及一种无人机设备,更具体的说是一种可拼接多旋翼运输无人机,包括应急降落伞弹出机构、自动升降挂钩机构、摄像头调节机构、飞行及基础机构,设备能够在意外坠落时保护无人机,设备能够调节运输挂钩升降且挂钩能够自锁,设备能够调节摄像镜头角度,设备能够飞行,设备能够与多台设备拼接,设备能够平稳降落。
应急降落伞弹出机构与飞行及基础机构相连,自动升降挂钩机构与飞行及基础机构相连,摄像头调节机构与飞行及基础机构相连。
作为本技术方案的进一步优化,本发明一种可拼接多旋翼运输无人机所述的应急降落伞弹出机构包括加速度传感器、带轴电机一、齿轮一、齿轮二、传动轴一、封盖、圆筒、两个圆通支撑杆、齿轮三、传动轴二、弹簧一、圆台、两个限位凸块、限位槽、弹出导向滑槽,加速度传感器与带轴电机一相连,带轴电机一与齿轮一转动连接,齿轮一与齿轮二相啮合,齿轮二与传动轴一相连,齿轮二与齿轮三相啮合,传动轴一与封盖相连,封盖与圆筒相接触,圆筒与两个圆通支撑杆相连,齿轮三与传动轴二相连,圆筒与传动轴二转动连接,传动轴二与圆台相连,弹簧一与圆筒相接触,弹簧一与圆台相接触,圆台设有两个限位凸块,圆筒设有限位槽,圆筒设有弹出导向滑槽,两个限位凸块与限位槽相接触。
作为本技术方案的进一步优化,本发明一种可拼接多旋翼运输无人机所述的自动升降挂钩机构包括带轴电机二、锥齿轮一、锥齿轮二、传动轴三、升降转轮、吊钩支撑座、绕线滚筒、两个支撑座一、吊钩锁扣、吊钩、吊钩转轴、吊钩支撑座转轴、吊线、吊线固定座,带轴电机二与锥齿轮一转动连接,锥齿轮一与锥齿轮二相啮合,锥齿轮二与传动轴三相连,传动轴三与绕线滚筒相连,传动轴三与两个支撑座一转动连接,升降转轮与吊钩支撑座转轴转动连接,升降转轮与吊线相接触,吊钩支撑座与吊钩锁扣转动连接,吊钩支撑座与吊钩支撑座转轴相连,绕线滚筒与吊线相连,吊钩锁扣与吊钩相接触,吊钩锁扣与吊钩转轴相铰接,吊钩与吊钩转轴相连,吊线与吊线固定座相连。
作为本技术方案的进一步优化,本发明一种可拼接多旋翼运输无人机所述的摄像头调节机构包括带轴电机三、齿轮四、齿轮五、摄像平台转轴、摄像平台、摄像装置、两个摄像装置支撑杆、带轴电机四、锥齿轮三、锥齿轮四、传动轴四、摄像装置转轴、两个皮带轮一、两个皮带一、两个皮带轮二,带轴电机三与齿轮四转动连接,齿轮四与齿轮五相啮合,齿轮五与摄像平台转轴相连,摄像平台转轴与摄像平台相连,摄像平台与两个摄像装置支撑杆相连,摄像平台与带轴电机四相连,带轴电机四与锥齿轮三转动连接,锥齿轮三与锥齿轮四相啮合,锥齿轮四与传动轴四相连,传动轴四与两个摄像装置支撑杆转动连接,摄像装置与摄像装置转轴相连,摄像装置转轴与两个摄像装置支撑杆转动连接,传动轴四与两个皮带轮一相连,两个皮带轮一与两个皮带一摩擦连接,两个皮带一与两个皮带轮二摩擦连接,摄像装置转轴与两个皮带轮二相连。
作为本技术方案的进一步优化,本发明一种可拼接多旋翼运输无人机所述的飞行及基础机构包括基础平台、多个旋翼、多个带轴电机五、多个支撑杆、多个弹簧二、多个缓冲圆筒、多个弹簧三、多个拼接块、多个拼接块转轴、多个拼接块限位腔、多个限位铆钉活动腔、多个限位铆钉、多个连接杆、多个滑块、多个滑槽,基础平台与多个带轴电机五相连,基础平台与多个支撑杆相连,多个旋翼与多个带轴电机五转动连接,多个支撑杆与多个弹簧二相接触,多个弹簧二与多个缓冲圆筒相接触,基础平台设有多个拼接块转轴,基础平台设有多个拼接块限位腔,多个弹簧三与多个拼接块相接触,多个拼接块与多个拼接块转轴相铰接,多个拼接块转轴与多个拼接块限位腔相接触,多个拼接块设有多个限位铆钉活动腔,基础平台与多个限位铆钉相接触,多个弹簧三与多个限位铆钉相接触,多个限位铆钉活动腔与多个限位铆钉相接触,多个支撑杆与多个连接杆相连,多个弹簧二与多个连接杆相接触,多个连接杆与多个滑块相连,多个缓冲圆筒设有多个滑槽,多个滑块与多个滑槽滑动连接,基础平台与加速度传感器相连,基础平台与带轴电机一相连,基础平台与传动轴一转动连接,基础平台与两个圆通支撑杆相连,基础平台与传动轴二转动连接,基础平台与带轴电机二相连,基础平台与两个支撑座一相连,基础平台与吊线固定座相连,基础平台与带轴电机三相连,基础平台与摄像平台转轴转动连接。
本发明一种可拼接多旋翼运输无人机的有益效果为:
本发明一种可拼接多旋翼运输无人机,设备能够在意外坠落时保护无人机,设备能够调节运输挂钩升降且挂钩能够自锁,设备能够调节摄像镜头角度,设备能够飞行,设备能够与多台设备拼接,设备能够平稳降落。
附图说明飞行及基础机构4
下面结合附图和具体实施方法对本发明做进一步详细的说明。
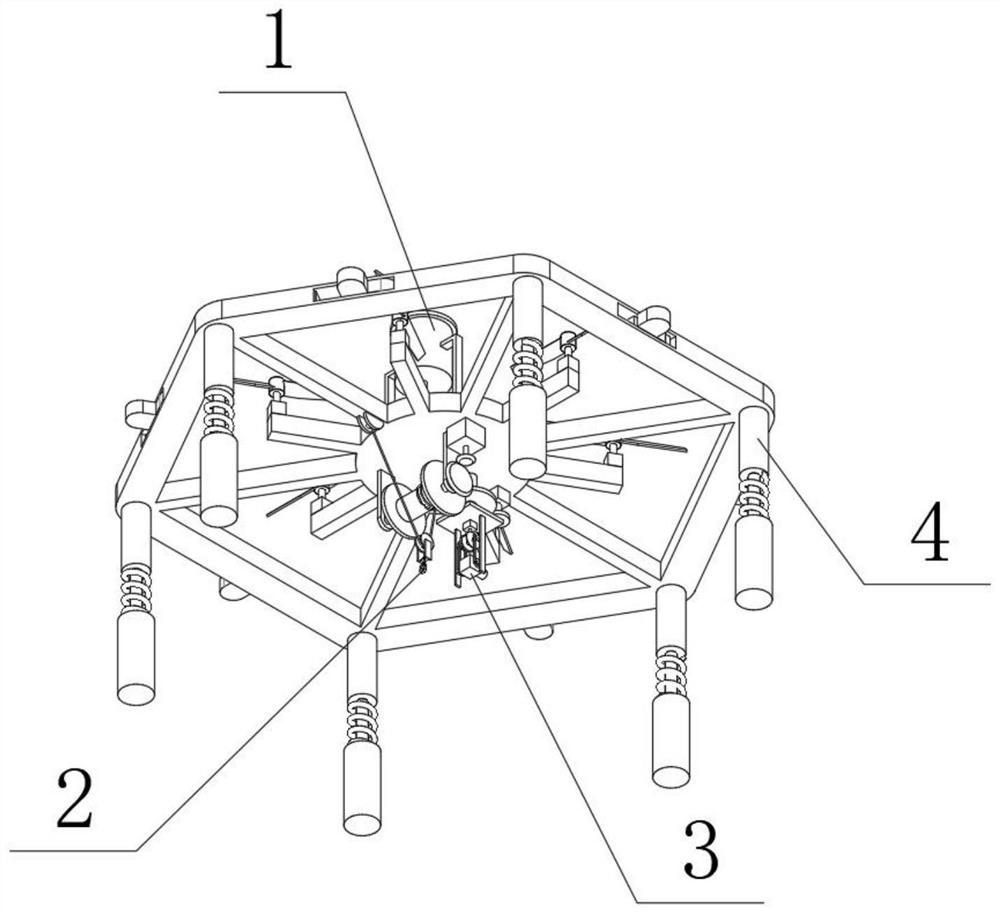
图1为本发明一种可拼接多旋翼运输无人机的结构示意图一。
图2为本发明一种可拼接多旋翼运输无人机的结构示意图二。
图3为本发明一种可拼接多旋翼运输无人机的结构示意图三。
图4为本发明一种可拼接多旋翼运输无人机的应急降落伞弹出机构1的结构示意图一。
图5为本发明一种可拼接多旋翼运输无人机的应急降落伞弹出机构1的结构示意图二。
图6为本发明一种可拼接多旋翼运输无人机的应急降落伞弹出机构1的结构示意图三。
图7为本发明一种可拼接多旋翼运输无人机的自动升降挂钩机构2的结构示意图一。
图8为本发明一种可拼接多旋翼运输无人机的自动升降挂钩机构2的结构示意图二。
图9为本发明一种可拼接多旋翼运输无人机的自动升降挂钩机构2的结构示意图三。
图10为本发明一种可拼接多旋翼运输无人机的摄像头调节机构3的结构示意图一。
图11为本发明一种可拼接多旋翼运输无人机的摄像头调节机构3的结构示意图二。
图12为本发明一种可拼接多旋翼运输无人机的摄像头调节机构3的结构示意图三。
图13为本发明一种可拼接多旋翼运输无人机的飞行及基础机构4的结构示意图一。
图14为本发明一种可拼接多旋翼运输无人机的飞行及基础机构4的结构示意图二。
图15为本发明一种可拼接多旋翼运输无人机的飞行及基础机构4的结构示意图三。
图16为本发明一种可拼接多旋翼运输无人机的飞行及基础机构4的结构示意图四。
图中:应急降落伞弹出机构1;加速度传感器1-1;带轴电机一1-2;齿轮一1-3;齿轮二1-4;传动轴一1-5;封盖1-6;圆筒1-7;圆通支撑杆1-8;齿轮三1-9;传动轴二1-10;弹簧一1-11;圆台1-12;限位凸块1-13;限位槽1-14;弹出导向滑槽1-15;自动升降挂钩机构2;带轴电机二2-1;锥齿轮一2-2;锥齿轮二2-3;传动轴三2-4;升降转轮2-5;吊钩支撑座2-6;绕线滚筒2-7;支撑座一2-8;吊钩锁扣2-9;吊钩2-10;吊钩转轴2-11;吊钩支撑座转轴2-12;吊线2-13;吊线固定座2-14;摄像头调节机构3;带轴电机三3-1;齿轮四3-2;齿轮五3-3;摄像平台转轴3-4;摄像平台3-5;摄像装置3-6;摄像装置支撑杆3-7;带轴电机四3-8;锥齿轮三3-9;锥齿轮四3-10;传动轴四3-11;摄像装置转轴3-12;皮带轮一3-13;皮带一3-14;皮带轮二3-15;飞行及基础机构4;基础平台4-1;旋翼4-2;带轴电机五4-3;支撑杆4-4;弹簧二4-5;缓冲圆筒4-6;弹簧三4-7;拼接块4-8;拼接块转轴4-9;拼接块限位腔4-10;限位铆钉活动腔4-11;限位铆钉4-12;连接杆4-13;滑块4-14;滑槽4-15。
具体实施方式
具体实施方式一:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本发明涉及一种无人机设备,更具体的说是一种可拼接多旋翼运输无人机,包括应急降落伞弹出机构1、自动升降挂钩机构2、摄像头调节机构3、飞行及基础机构4,设备能够在意外坠落时保护无人机,设备能够调节运输挂钩升降,设备能够调节摄像镜头角度,设备能够飞行,设备能够与多台设备拼接,设备能够平稳降落。
应急降落伞弹出机构1与飞行及基础机构4相连,自动升降挂钩机构2与飞行及基础机构4相连,摄像头调节机构3与飞行及基础机构4相连。
具体实施方式二:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的应急降落伞弹出机构1包括加速度传感器1-1、带轴电机一1-2、齿轮一1-3、齿轮二1-4、传动轴一1-5、封盖1-6、圆筒1-7、两个圆通支撑杆1-8、齿轮三1-9、传动轴二1-10、弹簧一1-11、圆台1-12、两个限位凸块1-13、限位槽1-14、弹出导向滑槽1-15,加速度传感器1-1与带轴电机一1-2相连,带轴电机一1-2与齿轮一1-3转动连接,齿轮一1-3与齿轮二1-4相啮合,齿轮二1-4与传动轴一1-5相连,齿轮二1-4与齿轮三1-9相啮合,传动轴一1-5与封盖1-6相连,封盖1-6与圆筒1-7相接触,圆筒1-7与两个圆通支撑杆1-8相连,齿轮三1-9与传动轴二1-10相连,圆筒1-7与传动轴二1-10转动连接,传动轴二1-10与圆台1-12相连,弹簧一1-11与圆筒1-7相接触,弹簧一1-11与圆台1-12相接触,圆台1-12设有两个限位凸块1-13,圆筒1-7设有限位槽1-14,圆筒1-7设有弹出导向滑槽1-15,两个限位凸块1-13与限位槽1-14相接触,降落伞设置在圆台1-12上,当无人机意外坠落时加速度传感器1-1发出信号驱动带轴电机一1-2,带轴电机一1-2带动齿轮一1-3转动,齿轮一1-3带动齿轮二1-4转动,齿轮二1-4带动传动轴一1-5转动,传动轴一1-5带动封盖1-6运动,使封盖1-6与圆筒1-7不再接触,同时齿轮二1-4带动齿轮三1-9转动,齿轮三1-9带动传动轴二1-10转动,传动轴二1-10带动台1-12转动,圆台1-12带动两个限位凸块1-13在限位槽1-14内运动,当两个限位凸块1-13运动到弹出导向滑槽1-15位置时,弹簧一1-11推出圆台1-12带动两个限位凸块1-13沿弹出导向滑槽1-15方向运动,进而将降落伞推出使设备能够减速安全降落。
具体实施方式三:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的自动升降挂钩机构2包括带轴电机二2-1、锥齿轮一2-2、锥齿轮二2-3、传动轴三2-4、升降转轮2-5、吊钩支撑座2-6、绕线滚筒2-7、两个支撑座一2-8、吊钩锁扣2-9、吊钩2-10、吊钩转轴2-11、吊钩支撑座转轴2-12、吊线2-13、吊线固定座2-14,带轴电机二2-1与锥齿轮一2-2转动连接,锥齿轮一2-2与锥齿轮二2-3相啮合,锥齿轮二2-3与传动轴三2-4相连,传动轴三2-4与绕线滚筒2-7相连,传动轴三2-4与两个支撑座一2-8转动连接,升降转轮2-5与吊钩支撑座转轴2-12转动连接,升降转轮2-5与吊线2-13相接触,吊钩支撑座2-6与吊钩锁扣2-9转动连接,吊钩支撑座2-6与吊钩支撑座转轴2-12相连,绕线滚筒2-7与吊线2-13相连,吊钩锁扣2-9与吊钩2-10相接触,吊钩锁扣2-9与吊钩转轴2-11相铰接,吊钩2-10与吊钩转轴2-11相连,吊线2-13与吊线固定座2-14相连,带轴电机二2-1带动锥齿轮一2-2转动,锥齿轮一2-2带动锥齿轮二2-3转动,锥齿轮二2-3带动传动轴三2-4转动,传动轴三2-4带动绕线滚筒2-7转动对吊线2-13长度进行调节,吊线2-13长度变化带动升降转轮2-5转动进而带动吊钩支撑座2-6升降,吊钩支撑座2-6带动吊钩锁扣2-9运动,吊钩锁扣2-9带动吊钩转轴2-11运动,吊钩转轴2-11带动吊钩2-10运动,当需要吊装时移动吊钩2-10使其与吊钩锁扣2-9间产生缺口将货物挂好,带动吊钩2-10受货物重力作用带动吊钩转轴2-11向靠近吊钩锁扣2-9方向摆动,吊钩锁扣2-9与吊钩2-10接触更牢固,使设备具备自动调节挂钩升降及挂钩悬挂货物能够自锁的功能。
具体实施方式四:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的摄像头调节机构3包括带轴电机三3-1、齿轮四3-2、齿轮五3-3、摄像平台转轴3-4、摄像平台3-5、摄像装置3-6、两个摄像装置支撑杆3-7、带轴电机四3-8、锥齿轮三3-9、锥齿轮四3-10、传动轴四3-11、摄像装置转轴3-12、两个皮带轮一3-13、两个皮带一3-14、两个皮带轮二3-15,带轴电机三3-1与齿轮四3-2转动连接,齿轮四3-2与齿轮五3-3相啮合,齿轮五3-3与摄像平台转轴3-4相连,摄像平台转轴3-4与摄像平台3-5相连,摄像平台3-5与两个摄像装置支撑杆3-7相连,摄像平台3-5与带轴电机四3-8相连,带轴电机四3-8与锥齿轮三3-9转动连接,锥齿轮三3-9与锥齿轮四3-10相啮合,锥齿轮四3-10与传动轴四3-11相连,传动轴四3-11与两个摄像装置支撑杆3-7转动连接,摄像装置3-6与摄像装置转轴3-12相连,摄像装置转轴3-12与两个摄像装置支撑杆3-7转动连接,传动轴四3-11与两个皮带轮一3-13相连,两个皮带轮一3-13与两个皮带一3-14摩擦连接,两个皮带一3-14与两个皮带轮二3-15摩擦连接,摄像装置转轴3-12与两个皮带轮二3-15相连,带轴电机三3-1带动齿轮四3-2转动,齿轮四3-2带动齿轮五3-3转动,齿轮五3-3带动摄像平台转轴3-4转动,摄像平台转轴3-4带动摄像平台3-5转动,摄像平台3-5带动两个摄像装置支撑杆3-7运动,两个摄像装置支撑杆3-7带动摄像装置转轴3-12运动,摄像装置转轴3-12带动摄像装置3-6运动,带轴电机四3-8带动锥齿轮三3-9转动,锥齿轮三3-9带动锥齿轮四3-10转动,锥齿轮四3-10带动传动轴四3-11转动,传动轴四3-11带动两个皮带轮一3-13转动,两个皮带轮一3-13带动两个皮带一3-14运动,两个皮带一3-14带动两个皮带轮二3-15转动,两个皮带轮二3-15带动摄像装置转轴3-12转动,摄像装置转轴3-12带动摄像装置3-6运动,使设备具备对摄像头水平及竖直方向调节功能。
具体实施方式五:
下面结合图1、图2、图3、图4、图5、图6、图7、图8、图9、图10、图11、图12、图13、图14、图15、图16说明本实施方式,本实施方式对实施方式一作进一步说明,所述的飞行及基础机构4包括基础平台4-1、多个旋翼4-2、多个带轴电机五4-3、多个支撑杆4-4、多个弹簧二4-5、多个缓冲圆筒4-6、多个弹簧三4-7、多个拼接块4-8、多个拼接块转轴4-9、多个拼接块限位腔4-10、多个限位铆钉活动腔4-11、多个限位铆钉4-12、多个连接杆4-13、多个滑块4-14、多个滑槽4-15,基础平台4-1与多个带轴电机五4-3相连,基础平台4-1与多个支撑杆4-4相连,多个旋翼4-2与多个带轴电机五4-3转动连接,多个支撑杆4-4与多个弹簧二4-5相接触,多个弹簧二4-5与多个缓冲圆筒4-6相接触,基础平台4-1设有多个拼接块转轴4-9,基础平台4-1设有多个拼接块限位腔4-10,多个弹簧三4-7与多个拼接块4-8相接触,多个拼接块4-8与多个拼接块转轴4-9相铰接,多个拼接块转轴4-9与多个拼接块限位腔4-10相接触,多个拼接块4-8设有多个限位铆钉活动腔4-11,基础平台4-1与多个限位铆钉4-12相接触,多个弹簧三4-7与多个限位铆钉4-12相接触,多个限位铆钉活动腔4-11与多个限位铆钉4-12相接触,多个支撑杆4-4与多个连接杆4-13相连,多个弹簧二4-5与多个连接杆4-13相接触,多个连接杆4-13与多个滑块4-14相连,多个缓冲圆筒4-6设有多个滑槽4-15,多个滑块4-14与多个滑槽4-15滑动连接,基础平台4-1与加速度传感器1-1相连,基础平台4-1与带轴电机一1-2相连,基础平台4-1与传动轴一1-5转动连接,基础平台4-1与两个圆通支撑杆1-8相连,基础平台4-1与传动轴二1-10转动连接,基础平台4-1与带轴电机二2-1相连,基础平台4-1与两个支撑座一2-8相连,基础平台4-1与吊线固定座2-14相连,基础平台4-1与带轴电机三3-1相连,基础平台4-1与摄像平台转轴3-4转动连接,多个带轴电机五4-3带动多个旋翼4-2转动产生升力带动多个带轴电机五4-3上升,多个带轴电机五4-3带动基础平台4-1运动,使设备能够飞行,当货物过重一台无人机负载能力无法满足工作需要时,按压多个限位铆钉4-12使其在多个限位铆钉活动腔4-11内下降,同时转动多个拼接块4-8在多个拼接块限位腔4-10内绕多个拼接块转轴4-9转动90度,此时将另一架调整后的无人机的拼接块4-8插入原无人机的拼接块限位腔4-10内,此时两架无人机的限位铆钉4-12分别与对方的基础平台4-1完成限位固定,使设备具备灵活拼接适应不同载重需求功能,设备降落时多个缓冲圆筒4-6先收到冲击,此时基础平台4-1带动多个支撑杆4-4向地面方向运动,多个支撑杆4-4带动多个连接杆4-13运动,多个连接杆4-13带动多个滑块4-14在多个滑槽4-15内滑动,同时多个支撑杆4-4压缩多个弹簧二4-5进行降速,使设备能够平稳降落。
本设备的工作原理是:设备能够在意外坠落时保护无人机,降落伞设置在圆台1-12上,当无人机意外坠落时加速度传感器1-1发出信号驱动带轴电机一1-2,带轴电机一1-2带动齿轮一1-3转动,齿轮一1-3带动齿轮二1-4转动,齿轮二1-4带动传动轴一1-5转动,传动轴一1-5带动封盖1-6运动,使封盖1-6与圆筒1-7不再接触,同时齿轮二1-4带动齿轮三1-9转动,齿轮三1-9带动传动轴二1-10转动,传动轴二1-10带动台1-12转动,圆台1-12带动两个限位凸块1-13在限位槽1-14内运动,当两个限位凸块1-13运动到弹出导向滑槽1-15位置时,弹簧一1-11推出圆台1-12带动两个限位凸块1-13沿弹出导向滑槽1-15方向运动,进而将降落伞推出使设备能够减速安全降落;设备能够调节运输挂钩升降且挂钩能够自锁,带轴电机二2-1带动锥齿轮一2-2转动,锥齿轮一2-2带动锥齿轮二2-3转动,锥齿轮二2-3带动传动轴三2-4转动,传动轴三2-4带动绕线滚筒2-7转动对吊线2-13长度进行调节,吊线2-13长度变化带动升降转轮2-5转动进而带动吊钩支撑座2-6升降,吊钩支撑座2-6带动吊钩锁扣2-9运动,吊钩锁扣2-9带动吊钩转轴2-11运动,吊钩转轴2-11带动吊钩2-10运动,当需要吊装时移动吊钩2-10使其与吊钩锁扣2-9间产生缺口将货物挂好,带动吊钩2-10受货物重力作用带动吊钩转轴2-11向靠近吊钩锁扣2-9方向摆动,吊钩锁扣2-9与吊钩2-10接触更牢固,使设备具备自动调节挂钩升降及挂钩悬挂货物能够自锁的功能;设备能够调节摄像镜头角度,带轴电机三3-1带动齿轮四3-2转动,齿轮四3-2带动齿轮五3-3转动,齿轮五3-3带动摄像平台转轴3-4转动,摄像平台转轴3-4带动摄像平台3-5转动,摄像平台3-5带动两个摄像装置支撑杆3-7运动,两个摄像装置支撑杆3-7带动摄像装置转轴3-12运动,摄像装置转轴3-12带动摄像装置3-6运动,带轴电机四3-8带动锥齿轮三3-9转动,锥齿轮三3-9带动锥齿轮四3-10转动,锥齿轮四3-10带动传动轴四3-11转动,传动轴四3-11带动两个皮带轮一3-13转动,两个皮带轮一3-13带动两个皮带一3-14运动,两个皮带一3-14带动两个皮带轮二3-15转动,两个皮带轮二3-15带动摄像装置转轴3-12转动,摄像装置转轴3-12带动摄像装置3-6运动,使设备具备对摄像头水平及竖直方向调节功能;设备能够飞行,多个带轴电机五4-3带动多个旋翼4-2转动产生升力带动多个带轴电机五4-3上升,多个带轴电机五4-3带动基础平台4-1运动,使设备能够飞行;设备能够与多台设备拼接,当货物过重一台无人机负载能力无法满足工作需要时,按压多个限位铆钉4-12使其在多个限位铆钉活动腔4-11内下降,同时转动多个拼接块4-8在多个拼接块限位腔4-10内绕多个拼接块转轴4-9转动90度,此时将另一架调整后的无人机的拼接块4-8插入原无人机的拼接块限位腔4-10内,此时两架无人机的限位铆钉4-12分别与对方的基础平台4-1完成限位固定,使设备具备灵活拼接适应不同载重需求功能;设备能够平稳降落,设备降落时多个缓冲圆筒4-6先收到冲击,此时基础平台4-1带动多个支撑杆4-4向地面方向运动,多个支撑杆4-4带动多个连接杆4-13运动,多个连接杆4-13带动多个滑块4-14在多个滑槽4-15内滑动,同时多个支撑杆4-4压缩多个弹簧二4-5进行降速,使设备能够平稳降落。
本发明的控制方式是通过控制器来自动控制,控制器的控制电路通过本领域的技术人员简单编程即可实现,属于本领域的公知常识,并且本发明主要用来保护机械装置,所以本发明不再详细解释控制方式和电路连接。
当然,上述说明并非对本发明的限制,本发明也不仅限于上述举例,本技术领域的普通技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,也属于本发明的保护范围。
- 一种可拼接多旋翼运输无人机
- 一种采用多旋翼无人机进行物流运输的装置