一种具有单髋关节驱动的双足步行机器人
文献发布时间:2023-06-19 10:33:45
技术领域
本发明涉及智能机器人技术领域,尤其涉及到一种具有单髋关节驱动的双足步行机器人。
背景技术
随着科学技术的发展,机器人的运用越来越广泛。其中双足机器人是本领域一个重要的研发方向,双足机器人相较于传统的轮式、履带式机器人,行动更加灵活,环境适应性更强,越障能力更为出色。同时双足式机器人具有更强的人机交互能力,能够使用更多的需求。
目前,传统的双足机器人结构上通常较为复杂,不利于对双足机器人的行走机理的研究,对其的控制也非常复杂,同时价格十分昂贵。因此,本发明提供了一种具有单髋关节驱动的双足步行机器人,以克服上述缺陷。
发明内容
本发明的目的在于针对现有技术中的不足,提供一种具有单髋关节驱动的双足步行机器人,以解决现有技术中存在的问题。
本发明的上述技术目的是用过以下技术方案实现的:
一种具有单髋关节驱动的双足步行机器人,包括腰部支架,所述腰部支架的下表面安装有控制箱,腰部支架下表面的左右两端内壁分别与第一髋关节总成以及第二髋关节总成连接,所述第一髋关节总成和第二髋关节总成的下部分别与第一大腿总成和第二大腿总成连接,所述第一大腿总成以及第二大腿总成分别与第一小腿总成和第二连接小腿总成连接,所述第一小腿总成和第二小腿总成上设置有足部总成。
本发明的进一步设置为:所述控制箱的内部设置有电源模块以及控制系统。
本发明的进一步设置为:所述第一髋关节总成包括第一髋关节支撑板和第一旋转电机,所述第一髋关节支撑板的一端通过定位螺钉固定在腰部支架上,第一髋关节支撑板的另一端通过第一旋转电机与第一大腿总成连接,所述第二髋关节总成包括第二髋关节支撑板,所述第二髋关节支撑板的一端通过定位螺钉固定在腰部支架上,第二髋关节支撑板的另一端通过定位螺丝固定在第二大腿总成上。
本发明的进一步设置为:所述第一大腿总成包括第一大腿支撑板和第二旋转电机,所述第一大腿支撑板的一端与第一髋关节支撑板传动连接,第一大腿支撑板的另一端上设置有第二旋转电机,所述第二旋转电机的输出轴上连接有减速机,第一大腿支撑板通过减速机与第一小腿总成连接,所述第二旋转电机与控制箱电性连接,所述第二大腿总成包括第二大腿支撑板和第三旋转电机,所述第二大腿支撑板的一端与第二髋关节支撑板传动连接,第二大腿支撑板的另一端上设置有第三旋转电机,所述第三旋转电机的输出轴上连接有减速机,第二大腿支撑板通过减速机与第二小腿总成连接,所述第三旋转电机与控制箱电性连接。
本发明的进一步设置为:所述第一小腿总成和第二小腿总成的结构相同均包括,小腿支架,所述小腿支架上部设置有多个增强轴,小腿支架的下部上设置有安装轴,所述安装轴上安装有足部总成。
本发明的进一步设置为:所述足部总成包括行走块和压力传感器,所述行走块设置在安装轴上,行走块的底部设置有压力传感器。
本发明的进一步设置为:所述小腿支架的一端设置有用于安装第二旋转电机和第三旋转电机的第一安装孔,所述小腿支架的另一端设置有用于设置安装轴的第二安装孔,所述小腿支架上还设置有用于安装增强轴的第三安装孔。
本发明的进一步设置为:所述行走块上设置有用于供安装轴通过的通孔。
综上所述,本发明具有以下有益效果:
1.本发明所述的一种具有单髋关节驱动的双足步行机器人,具有一个髋关节自由度与两个膝关节自由度,整体结构设计更加简单,对其控制方法较为简单,方案成本低,易于实现。
2.本发明所述的一种具有单髋关节驱动的双足步行机器人采用单髋关节设计,方便与建立数值模型以及对机器人的运动机理进行分析,为研究机器人行走本质原理和实现基本双足行走运动提供理想验证和实验平台。
3.本发明所述的一种具有单髋关节驱动的双足步行机器人的腰部平台上设置有控制箱,用于控制机器人上的各个电机完成步行动作。
附图说明
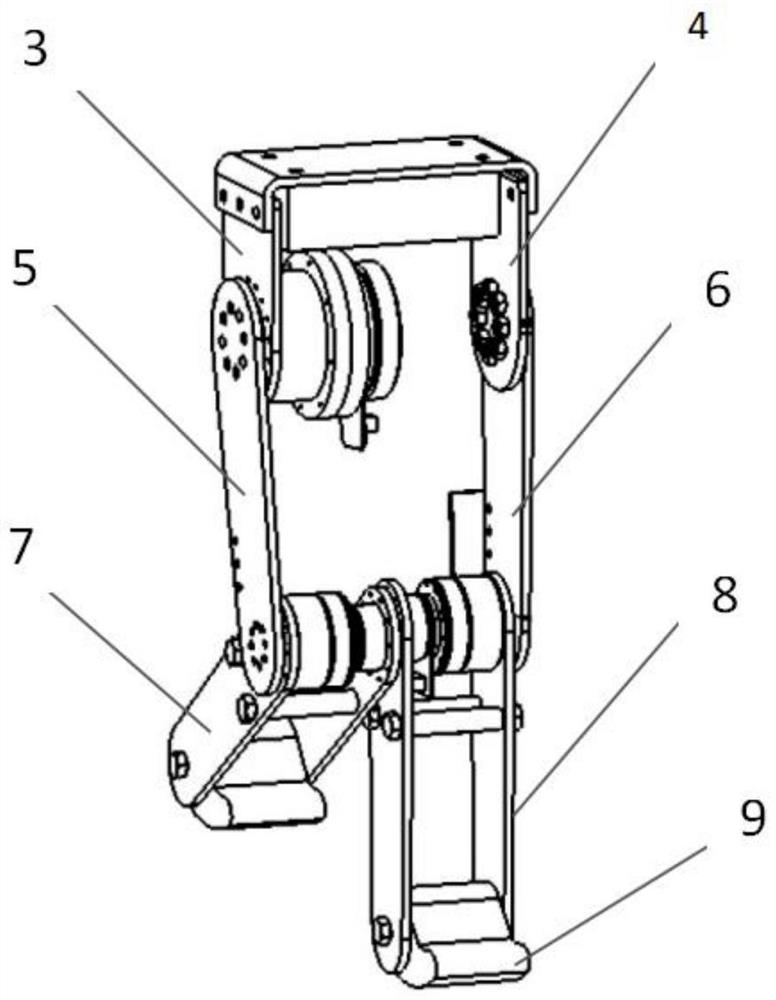
图1是本发明所述的双足机器人的结构示意图。
图2是本发明所述的腰部支架的结构示意图。
图3是本发明所述的髋关节总成的结构示意图。
图4是本发明所述的大腿总成的结构示意图。
图5是本发明所述的小腿总成的结构示意图。
图6是本发明所述的足部总成的结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图示与具体实施例,进一步阐述本发明。
如图1至6所示,本发明提出的一种具有单髋关节驱动的双足步行机器人,包括腰部支架1,所述腰部支架1的下表面安装有控制箱2,腰部支架1下表面的左右两端内壁分别与第一髋关节总成3以及第二髋关节总成4连接,所述腰部支架1的两侧开有多个M8.5定位孔,所述第一髋关节总成3和第二髋关节总成4的下部分别与第一大腿总成5和第二大腿总成6连接,所述第一大腿总成5以及第二大腿总成6分别与第一小腿总成7和第二连接小腿总成8连接,所述第一小腿总成7和第二小腿总成8上设置有足部总成9。
所述控制箱2的内部设置有电源模块(图中未画出)以及控制系统(图中未画出),所述电源模块用于为各个电机提供电能,所述控制系统用于控制各个电机的工作状态。
所述第一髋关节总成3包括第一髋关节支撑板31和第一旋转电机32,所述第一旋转电机32为EC90电机,所述第一髋关节支撑板31的一端通过定位螺钉固定在腰部支架1上,所第一髋关节支撑板31的另一端通过第一旋转电机32与第一大腿总成5连接,所述第一旋转电机32与控制箱2电性连接,所述第二髋关节总成4包括第二髋关节支撑板41,所述第二髋关节支撑板41的一端通过定位螺钉固定在腰部支架1上,第二髋关节支撑板41的另一端通过定位螺丝固定在第二大腿总成6上,所述第一髋关节总成3与第一大腿总成5具有一个自由度,所述第二髋关节总成4通过多个M8定位孔与第二大腿总成6固定连接,不具有自由度。
所述第一大腿总成5包括第一大腿支撑板51和第二旋转电机52,所述第一大腿支撑板51的一端与第一髋关节支撑板31传动连接,第一大腿支撑板51的另一端上设置有第二旋转电机52,所述第二旋转电机52的输出轴上连接有减速机,第一大腿支撑板51通过减速机与第一小腿总成7连接,所述第二旋转电机52与控制箱2电性连接,所述第二大腿总成6包括第二大腿支撑板61和第三旋转电机62,所述第二大腿支撑板61的一端与第二髋关节支撑板41传动连接,第二大腿支撑板61的另一端上设置有第三旋转电机62,所述第三旋转电机62的输出轴上连接有减速机,第二大腿支撑板61通过减速机与第二小腿总成8连接,所述第三旋转电机62与控制箱2电性连接,所述第一大腿总成5与第一小腿总成7具有自由度,所述第二大腿总成6与第一小腿总成8具有自由度。
所述第一小腿总成7和第二小腿总成8的结构相同均包括,小腿支架71,所述小腿支架71上部设置有多个增强轴72,小腿支架71的下部上设置有安装轴73,所述安装轴73通过M8定位孔与足部总成9连接。
所述足部总成9包括行走块91和压力传感器92,所述行走块91设置在安装轴73上,行走块91的底部设置有压力传感器92,所述行走部91未流线仿人型设计,所述压力传感器92用于记录机器人足部与地面接触时间以及机器人的重心。
所述小腿支架71的一端设置有用于安装第二旋转电机52和第三旋转电机62的第一安装孔,所述小腿支架72的另一端设置有用于设置安装轴73的第二安装孔,所述小腿支架71上还设置有用于安装增强轴72的第三安装孔。
所述行走块91上设置有用于供安装轴73通过的通孔911。
本发明的工作原理如下:
包括腰部支架1,所述腰部支架1的下表面安装有控制箱2,腰部支架1下表面的左右两端内壁分别与第一髋关节总成3以及第二髋关节总成4连接,所述第一髋关节总成3和第二髋关节总成4的下部分别与第一大腿总成5和第二大腿总成6连接,所述第一大腿总成5以及第二大腿总成6分别与第一小腿总成7和第二连接小腿总成8连接,所述第一小腿总成7和第二小腿总成8上设置有足部总成9,所述控制箱2的内部设置有电源模块以及控制系统,设置有髋关节驱动机构,具有一个髋关节自由的和两个膝关节自由度,通过控制箱2可以控制机器人完成步行动作。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
- 一种具有单髋关节驱动的双足步行机器人
- 一种具有单髋关节驱动的双足步行机器人