一种基于语音识别技术的老年人生活辅助设备
文献发布时间:2023-06-19 10:35:20
技术领域
本发明涉及生活辅助设备领域,具体涉及一种基于语音识别技术的老年人生活辅助设备。
背景技术
随着我国人口老龄化问题日益严重,老年人口数目日益增多。随着年龄的增长,老年人多有腿脚不便的情况,有时难以完成一些如弯腰,下蹲等简单的动作,这给老年人的基本生活带来了极大挑战,因为一些基本生活活动例如如厕和行走等动作完成比较困难。
目前,国内外兼具安全、实用、功能性的老年人生活辅助设备非常少,不能为老年人提供人性化的服务,不能有效满足老年人多样化、多层次养老服务需求。其中,老年人如厕和行走是两大难题。虽然目前国内外已有帮助老年人如厕和行走的辅助设计,但功能单一,未与人工智能相结合,老年人独自操作设备非常困难。
发明内容
本发明的目的就是为了解决上述现有技术的不足,提供一种基于语音识别技术的老年人生活辅助设备,运用创新设计理念,综合应用产品组合创新技术和方法、语音识别技术、自动控制技术,通过单片机语音模块对设备的其他模块进行控制,对设备进行智能管理,可在如厕和行走方面助老。
为实现上述目的,本发明是通过以下技术方案实现的:
一种基于语音识别技术的老年人生活辅助设备,包括靠背、坐垫,还包括行走机构、升降机构、超声波测距传感器、语音识别系统;其中,
所述行走机构包括下底盘,所述下底盘下部前后四角处设置有四个滚轮,其中后方滚轮处设置有驱动滚轮的直流电机;
所述升降机构包括上底盘、平行四边形升降单元体以及步进电动推杆;所述平行四边形升降单元至少有两组,上部连接所述上底盘,下部连接所述下底盘;所述步进电动推杆至少有两个,设置在所述平行四边形升降单元体处,上部连接所述平行四边形升降单元体上端,下部连接平行四边形升降单元体下端,通过步进电动推杆带动平行四边形升降单元体升降而实现设备的升降;
所述坐垫一侧安装在一根连接轴上,所述连接轴两端设置有从动齿轮,所述从动齿轮与设置在上底盘下部的主动齿轮相啮合,所述主动齿轮与设置在上底盘下部的步进电机相连接,通过步进电机驱动主动齿轮、从动齿轮、连接轴从而驱动坐垫上下转动;
所述语音识别系统安装在所述下底盘下部或上底盘下部,其包括电源、语音识别模块、单片机、语音合成模块,所述单片机用以控制所述直流电机、步进电动推杆、步进电机;
所述超声波测距传感器安装在下底盘前部,并连接所述单片机。
进一步地,所述平行四边形升降单元体为二级平行四边形机构,即通过设置连杆组成上下两个连接在一起的平行四边形结构。
进一步地,所述坐垫、上底盘、下底盘中部对应部位镂空。
进一步地,所述上底盘左右两侧安装有转动扶手,所述转动扶手通过转动铰链安装,并采用自动弹簧插销锁住。
进一步地,所述靠背处设置有拉杆机构,能够实现手动拉伸或收缩。
进一步地,通过直流电机转速的不同,使得滚轮速度不同,实现设备的转向。
进一步地,下底盘下部前方两个滚轮处设置有制动机构。
本发明有益效果:
本发明基于语音识别技术的老年人生活辅助设备,结合语音识别技术,利用单片机语音模块,研究实现老年人生活辅助设备,可以帮助老年人解决如厕和行走方面的生活难题,使设备朝着智能化方向发展,提高设备的可靠性和使用价值。
附图说明
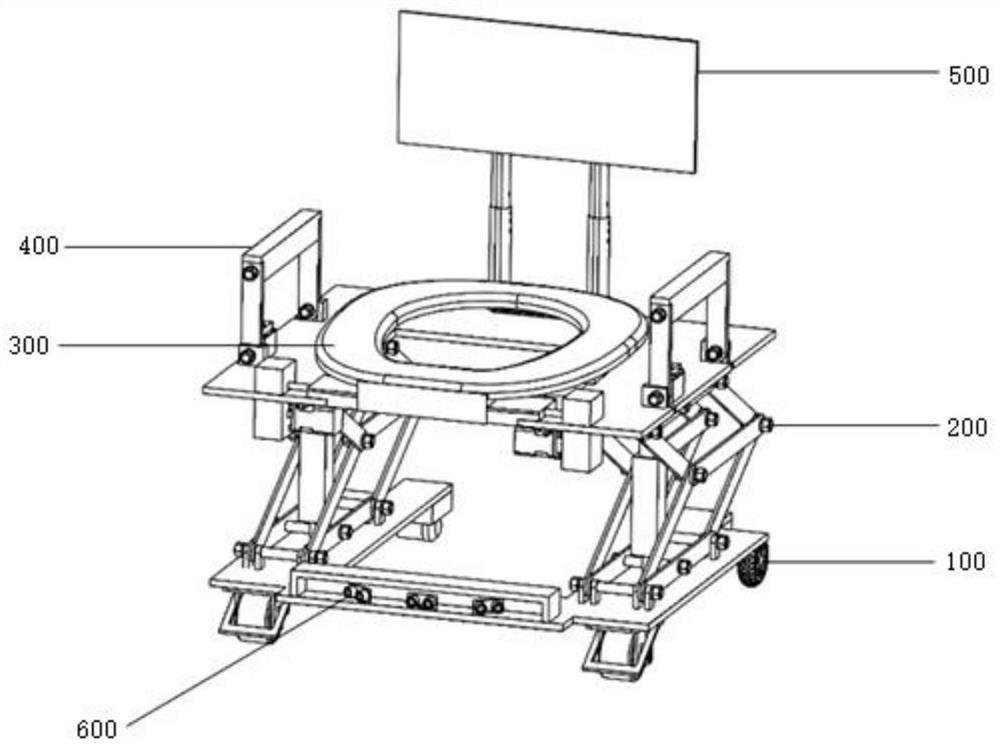
图1为本发明整体结构示意图;
图2为本文发明语音识别流程图;
图3为本发明中控制系统电路原理图;
图4为本发明中行走机构的示意图;
图5为本发明中升降机构的示意图;
图6为本发明中转动坐垫机构的示意图;
图7为本发明中转动扶手机构的示意图;
图8为本发明中拉杆靠背机构的示意图;
图中:100-行走机构,200-升降机构,300-转动坐垫机构,400-转动扶手机构,500-拉杆靠背机构,600-超声波测距传感器,1-直流电机A,2-直流电机B,3-联轴器A,4-联轴器B,5-后轮A,6-后轮B,7-前轮,8-制动机构,9-下底盘,10-步进电动推杆,11-平行四边形升降单元体,12-步进电机,13-上底盘,14-齿轮A保护架,15-齿轮B保护架,16-齿轮A,17-齿轮B,18-连接轴,19-坐垫,20-扶手,21-转动铰链,22-自动弹簧插销,23-靠背,24-伸缩拉杆,25-拉杆按钮,26连杆,27上顶点双头螺栓,28下顶点双头螺栓,29上中心点双头螺栓,30下中心点双头螺栓。
具体实施方式
下面将结合附图及实施例,对本发明的技术方案进行具体描述。
如图1所示,本发明实施例提供一种基于语音识别技术的老年人生活辅助设备,主要包括行走机构100、升降机构200、转动坐垫机构300、转动扶手机构400、拉杆靠背机构500、超声波测距传感器600和语音识别系统,所述语音识别系统包括电源、语音识别模块、STM32单片机和语音合成模块,所述语音识别模块优选型号为LD3320,所述语音合成模块优选型号为SYN6288。需要说明,所述语音识别系统可以设置在行走机构100中,也可以设置在升降机构200中,图中并未画出。
所述语音识别模块的工作模式设置为一级口令模式,即每次识别时都需要说出设定的一级口令之后,才能进行下一级的识别。唤醒设备之后才能进行后续操作,这样减少了垃圾词汇对设备工作情况的影响。当模块识别到用户的语音后,先进行预处理以及语音特征的提取,在提前存入的关键词库中进行匹配,将声音转化为文本,实现语音的输入,并且通过与STM32单片机的串口通信,将信息传递给STM32单片机,再由STM32单片机对设备进行控制,对设备的语音控制由此开始。语音合成模块通过串口与STM32单片机通信,且外接喇叭,将文本转化为声音,实现语音的输出。当设备识别到用户的语音命令后准备运行时,STM32单片机可控制语音合成模块输出动作名称的语音,为老年人提供语音提醒功能。
优选24V电源作为设备的总电源,为直流电机A1、直流电机B2、步进电动推杆10和步进电机12提供24V电压,然后通过设置降压模块将24V电压降为5V提供给语音识别模块、语音合成模块和超声波测距传感器600,再由5V降为3.3V提供给STM32单片机。
所述行走机构100、升降机构200和转动坐垫结构300由语音识别系统自动控制,所述转动扶手机构400和拉杆靠背机构500由用户手动操作。
如图4,所述行走机构100包括下底盘9、直流电机A1、直流电机B2、联轴器A3、联轴器B4、后轮A5、后轮B6、前轮7和制动机构8,其采用后驱方式。直流电机A1和直流电机B2固定在下底盘9,分别连接联轴器A3和联轴器B4,带动后轮A5和后轮B6运动,实现前进与后退,通过直流电机A1与直流电机B2转速的不同,使得后轮A5和后轮B6速度不同,实现设备的转向。所述前轮7起辅助支撑设备的作用,带制动机构8,所述制动机构8由包括弹簧片和踏板,通过脚踩的方式进行定位,类似于常见刹车脚轮的工作原理,可在特定位置停住设备。
如图5,所述升降机构200包括上底盘13、步进电动推杆10和两组平行四边形升降单元体11。所述平行四边形升降单元体11由两个连杆机构组成,所述连杆机构是通过七根连杆26连接在一起形成的上下两个平行四边形结构,两个连杆机构的上部顶点通过上顶点双头螺栓27连接,下部顶点通过下顶点双头螺栓28连接,上部中心点通过上中心点双头螺栓29连接,下部中心点通过下中心点双头螺栓30连接,所述步进电动推杆10下端固定安装在下中心点双头螺栓30上,上端固定安装在上中心点双头螺栓29上,由步进电动推杆10的推动与收缩动作带动升降机构200运动。平行四边形升降单元体11对称分布,提高了设备的稳定性。
如图6,所述转动坐垫机构300包括步进电机12、齿轮A保护架14、齿轮B保护架15、齿轮A16、齿轮B17、连接轴18和坐垫19。所述坐垫19固定安装在连接轴18上,所述连接轴18两端固定安装有齿轮B17作为从动齿轮,所述上底盘13上对应齿轮B17安装有两个步进电机12,所述步进电机12的输出轴上固定安装有齿轮A16作为主动齿轮,所述齿轮A16与齿轮B17啮合。由步进电机12输出转动驱动齿轮A16进而通过齿轮B17、连接轴18带动坐垫19转动。所述齿轮A16外部设置有齿轮A保护架14,所述齿轮B17外部设置有齿轮B保护架15,避免齿轮与用户接触,保护用户的安全。
如图7,所述转动扶手机构400包括扶手20、转动铰链21和自动弹簧插销22。在转动铰链21的作用下,用户可手动将扶手20转动到上底盘13上方竖直位置,然后通过自动弹簧插销22将其锁住,使之固定。设备用完后存储时,用户可解除自动弹簧插销22的锁定,将扶手20转动到上底盘13下方竖直位置,贴近平行四边形升降单元体11,减小设备所占空间,有利于用户存储,实现设备折叠功能。
如图8,所述拉杆靠背机构500包括靠背23、伸缩拉杆24和拉杆按钮25。靠背23固定安装在伸缩拉杆24的最高级,可随伸缩拉杆24的伸缩一同运动。用户按下拉杆按钮25后,拉杆按钮25的垂直运动方向变成锁扣的水平运动,用户可使手动使伸缩拉杆24上升或下降,靠背23也被带动。设备用完后存储时,用户可按下拉杆按钮25,将伸缩拉杆24降至最低位置,靠背23也随之降到最低位置,节省设备存放空间。
优选地,本发明中的语言识别系统设置在下底盘9的底部,整体降低本发明的重心。
根据设备的工作状态进行不同的控制。设备共有五种状态,分别为:折叠状态、下蹲辅助状态、如厕辅助状态、行走辅助状态和起立辅助状态。结合设备工作状态流程进行分析:
(1)折叠状态:制动机构8起作用,设备不能移动,步进电动推杆10在工作最低位置,扶手20在上底盘13下方竖直位置,贴近平行四边形升降单元体11,伸缩拉杆24处于收缩状态,靠背23下降到最低点。
(2)下蹲辅助状态:用户手动将扶手20转动到上底盘13上方竖直位置,并用自动弹簧插销22将其锁住,按下拉杆按钮25,将伸缩拉杆24提高到最高位置,靠背23起支撑人体背部作用。用户对设备发出下蹲辅助状态的语音命令,语音识别模块识别到用户的语音命令后,传递信息给STM32单片机,由STM32单片机控制步进电动推杆10伸长到极限值,升降机构200处于最高点;控制步进电机12输出转速,带动坐垫19旋转一定角度,便于在用户下蹲时起支撑作用。
(3)如厕辅助状态:用户对设备发出如厕辅助状态的语音命令,语音识别模块识别到用户的语音命令后,通过串口通信传递信息给STM32单片机,STM32单片机控制步进电机12转动,使之贴合上底盘13,同时,控制步进电动推杆10缩短一定距离,设备下降到一定位置,便于用户如厕。
(4)行走辅助状态:与(3)如厕辅助状态处于同等优先级,都由下蹲辅助状态转变而成,具体情况由用户控制。由下蹲辅助状态下降到一定位置,辅助用户行走,且可通过语音识别系统控制设备与(3)如厕辅助状态进行切换,便于应对不同的实际情况。解除制动机构8的锁定后,设备辅助行走的工作模式又可分为人为控制模式,以及自动避障模式。人为控制模式,即用户通过不同的语音命令人为控制行走机构100进行前进、后退、左转、右转和停止;自动避障模式,即用户通过语音命令开启设备的自动避障模式,设备通过超声波测距传感器600对外界环境的感知,反馈给STM32单片机,再由STM32对行走机构100进行控制。
(5)起立辅助状态:用户完成如厕或行走后,可通过语音识别系统控制设备进入起立辅助状态,步进电动推杆10伸长,升降机构200上升到最高点,步进电机12输出转速,带动坐垫19旋转到便于用户起立的位置。
用户完成起立动作后,可通过语音控制步进电动推杆10下降以及步进电机12旋转,改变升降机构200和转动坐垫机构300的状态,再手动操作转动扶手机构400和拉杆靠背机构500,使之折叠,设备从起立辅助状态到折叠状态,设备完成了一个工作流程。设备在运行的过程中,完成每个动作之前,STM32单片机控制语音合成模块输出相应的动作的语音,完成语音提醒功能,为老年人提供了极大的方便。本发明通过旋转坐垫19起到辅助老人进行站立和坐下,相较于一般设备整体翻转具有更低的重心,能够有效保证在老人站立或坐下时设备不会因为失去重心而造成整体翻覆,致使老人受伤。
上面以举例方式对本发明进行了说明,但本发明不限于上述具体实施例,凡基于本发明所做的任何改动或变形均属于本发明要求保护的范围。
- 一种基于语音识别技术的老年人生活辅助设备
- 一种基于语音识别技术的电网调度辅助交互方法