一种椎弓根螺钉植入方法
文献发布时间:2023-06-19 10:35:20
技术领域
本发明属于医疗领域,特别涉及一种椎弓根螺钉植入方法。
背景技术
椎弓根螺钉以其优越的生物力学表现已获得全世界脊柱外科医师的认可,并广泛应用于创伤、畸形、结核、肿瘤、退行性变等各种脊柱疾病的治疗[1]。然而,如果螺钉的位置不佳势必会影响其生物力学效果,严重者甚至损伤血管、神经、脊髓等,导致灾难性的后果[2-3]。因此,如何提高植钉准确率一直是脊柱外科领域研究的焦点。
目前临床常用的椎弓根螺钉植入方式主要有:C型臂透视下的徒手置钉、计算机导航技术和3D打印导航模板技术[4]。上述置钉方式虽在一定程度上提高了置钉的效率和准确性,但在实际临床应用中仍存在许多问题。C型臂透视下的徒手置钉是目前最常用的方法,其置钉准确率也较高[5],其劣势主要包括[6]:①术中反复的X线透视增加了术者及患者的射线暴露风险;②操作C臂过程中,C臂角度位置的偏移、患者体位不能做到完全中立对称,或操作中导致患者在体位架上出现移动,均会影响椎弓根影像效果,出现椎弓根影像变形,与真实椎弓根影像出现差异。而术者在螺钉植入时,往往参考术中影像进行置钉,进而出现置钉偏移;③易受术者经验及术中状态影响,且学习曲线较长。计算机导航技术为椎弓根螺钉植入提供实时监控,虽然提高了椎弓根螺钉植入的准确性[7-9],但其缺点是:①导航设备昂贵,且学习曲线相对较长,难以短期内在更大范围开展;②延长了手术时间,增加了患者术中的风险。3D打印导航模板技术依据“逆向工程原理”及“快速成型技术”获得含有置钉通道的导航模板[10],进而辅助置钉,是近年来研究的热点,但临床中发现其存在的问题[11]为:①在退变严重的患者中出现导板与椎体贴合困难或贴合后稳定性差;②术者在顺导航通道植入螺钉时,螺钉植入方向可控性差,影响植钉准确性。因此,我们拟设计一种新的螺钉植入方式即角度控制组合式椎弓根螺钉植入工具(专利号:ZL201420307008.8)结合3D模型及导板辅助椎弓根螺钉精准植入的新技术,并推广应用于临床,以辅助术者徒手植钉,从而提高其准确性,降低手术成本,缩短手术时间,降低神经损伤风险。
参考文献:
[1]Gautschi OP,Schatlo B,Schaller K,et al.Clinically relevantcomplications related to pedicle screw placement in thoracolumbar surgery andtheir management:a literature review of 35,630 pedicle screws.NeurosurgFocus,2011,31(4):E8.
[2]Zhu F,Sun X,Qiao J,et al.Misplacement pattern of pedicle screws inpediatric patients with spinal deformity:a computed tomography study[J].JSpinal Disord Tech,2014,27(8):431-415.
[3]Soultanis KC,Sakellariou VI,Starantzis KA,et al.Late diagnosis ofperforation of the aorta by apedicle screw.Acta Orthop Belg,2013,79(4):361-367.
[4]刘运潮,侯树勋,张宇鹏.脊柱椎弓根螺钉置钉技术研究进展[J].中国骨与关节志,2016,5(08):596-601.
[5]Mason A,Paulsen R,Babuska JM,et al.The accuracy of pedicle screwplacement using intraoperative image guidance systems.JNeurosurg Spine.2014;20(2):196-203.
[6]Koktekir E,Ceylan D,Tatarli N,et al.Accuracy of luoroscopically-assisted pedicle screw placement:analysis of1,218screws in 198patients.SpineJ,2014,14(8):1702-1708.
[7]杨睿,李勇奇,张柯,方洲,夏海军,汪少波,廖燚.天玑骨科机器人辅助椎弓根螺钉置入的临床应用及体会[J].实用骨科杂志,2019,25(10):892-897.
[8]刘亚军,乐晓峰,郑山,田伟.计算机导航辅助颈椎椎弓根螺钉内固定技术[J].骨科临床与研究杂志,2018,3(03):182-187.
[9]陈晓明,肖增明,宗少晖,陈前芬.计算机导航引导下脊柱后路椎弓根螺钉置入内固定:准确性及安全性[J].中国组织工程研究,2015,19(13):2119-2124.
[10]王雅辉,刘正蓬,褚立,明颖,张义龙,孙志杰,王建华,李哲,孙贺.3D打印技术在椎弓根螺钉植入过程中的应用价值[J].实用医学杂志,2019,35(06):931-935.
[11]徐震超,陈刚.3D打印技术在脊柱外科的应用进展[J].临床与病理杂志,2018,38(11):2513-2517.
发明内容
本发明提供一种新的螺钉植入方式即角度控制组合式椎弓根螺钉植入工具(专利号:ZL201420307008.8)结合3D模型及导板辅助椎弓根螺钉精准植入的新技术,并推广应用于临床,以辅助术者置钉,从而提高其准确性,降低操作难度及手术成本,缩短手术时间,降低神经、血管、脊髓等损伤风险。
本发明的技术方案是:一种椎弓根螺钉植入方法,包括以下步骤:
1)组装角度控制工具
2)打印导板及椎体3D模型
①收集患者术前手术节段椎体CT平扫(层厚0.5mm)资料
②DICOM格式保存
③导入Mimics 17.0三维模型重建
④重建模型以STL格式导入3-Matic21.0软件
⑤模拟螺钉的位置、方向、直径,设计最优钉道,提取椎体棘突、椎板、关节突的形态解剖;
⑥设计反向模板,形成带有2个定位导向孔的导板;
⑦椎体三维模型及导板文件保存后输入3DS Project 3600型光敏树脂打印设备打印出椎体三维模型及导航模板。
3)角度控制组合式椎弓根螺钉植入工具结合导板植入螺钉
将导板紧贴与椎弓根后缘,调整互相垂直的两个角度表,使其角度表上数值与术前椎体CT测量数值相同后,沿着导板孔开口并开路以建立钉道,植入椎弓根螺钉。
优选地,角度手柄上安装有重力指针、360°刻度表盘,角度手柄在偏转的过程中可读取其偏转角度,角度手柄安装2个互成90°的表盘,控制椎弓根螺钉植入水平面角度(TSA)及矢状面角度(SSA)。
优选地,所述步骤3)具体为:
患者取俯卧位,考虑到术中因体位因素对数据的影响,故在摆好体位后采用水平仪进行检测,若不符合要求,则重新调整患者术前体位,直至符合要求为止;术前进行椎体三维模型及导板灭菌,预先在3D模型上进行模拟植钉,并在模型测量螺钉植入的外展及头、尾向倾角度;术中充分剥离椎体后缘组织结构,显露椎体棘突、椎板和关节突,将导板紧密贴附于椎体人字脊,助手协助固定导板,术者使用角度控制组合式椎弓根螺钉植入工具,按照椎体3D模型上所模拟得到的外展及头、尾向倾角度,调整术者螺钉植入角度,使角度控制组合式椎弓根螺钉植入工具上两个角度表的数值与模拟数值一致后植入螺钉。
有益效果:
①克服了椎弓根螺钉植入过程中置钉点确定困难及置钉方向可控性差等问题;
②提高了螺钉植入的准确性,缩短了手术时间,降低了术者及患者在术中的射线暴露,降低神经、血管、脊髓等损伤风险;
③降低了手术成本,并降低了术者置钉难度,便于市、县等各级医疗单位的广泛开展。
附图说明
图1为角度控制组合式椎弓根螺钉植入工具的结构示意图。
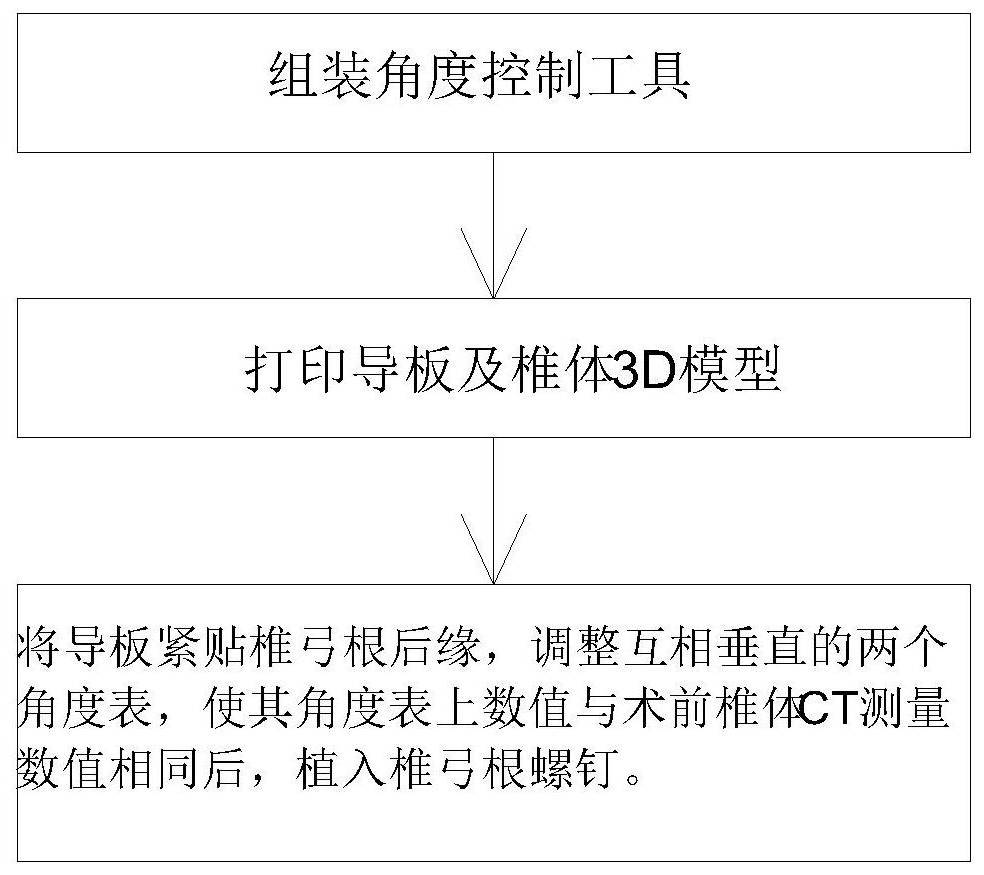
图2为本发明椎弓根螺钉植入方法的流程图。
图3为本发明椎弓根螺钉植入方法的示意图。
图4为导板的结构示意图。
图5为椎弓根螺钉植入的水平截面图。
图6为椎弓根螺钉植入的矢状截面图。
图中 1-手柄套件,2-套杆2,3-角度手柄,4-置钉套件,5-开口锥,6-开路锥,7-定位针持杆,8-定位针Ⅰ,9-定位针Ⅱ,10-导板,11-3D椎体模型,12-导板,13-角度控制工具,14-椎体。
具体实施方式
下面结合附图和具体实施例对本发明作详细描述。
如图1-6所述,本发明提供一种新的螺钉植入方式即角度控制组合式椎弓根螺钉植入工具(专利号:ZL201420307008.8)结合3D模型及导板辅助椎弓根螺钉精准植入的新技术,并推广应用于临床,以辅助术者徒手置钉,从而提高其准确性,降低手术成本,缩短手术时间,降低神经损伤风险。具体如下:
1.角度控制组合式椎弓根螺钉植入工具
角度控制组合式椎弓根螺钉植入工具是甘肃省中医院杨镇源副主任医师设计发明的一种新型椎弓根螺钉植入工具(专利号:ZL201420307008.8),由手柄套件1、套杆2、角度手柄3、置钉套件4、开口锥5、开路锥6、定位针持杆7、定位针Ⅰ8、定位针Ⅱ9组成,可以组合使用,组合简单、拆装方便。根据两个相互垂直面可确定一个立方体的数学原理,在工具上设计安装互相垂直的两个角度表,分别控制螺钉植入的外展及头、尾向倾角。刻度表采用“不倒翁效应”设计原理,当椎弓根螺钉植入工具纵轴垂直于地面时,两个角度表的指针均指向0度;随着置钉角度的调整,角度表盘发生偏转而指针仍保持垂直,从而在表上可读出植入工具杆偏转角度。结合术前椎体三维重建及预置钉角度测量与术前患者体位水平仪测量角度差,得出所需置钉角度,从而通过两个角度表所读取数值达到置钉角度的准确控制。使用时通过角度手柄上的表盘来显示工具与进钉点垂直面的角度。
2.导板制作
需要进行椎弓根螺钉植入患者术前行手术节段椎体CT平扫(层厚0.5mm),将获取的椎体CT资料以DICOM格式保存后导入三维重建软件Mimics 17.0(Materialise companyBelgium)进行椎体三维模型重建,将重建的模型以STL格式导入3-Matic21.0软件并模拟螺钉的位置、方向、直径,设计出椎弓根螺钉的最优钉道,提取椎体棘突、椎板、关节突关节的形态解剖,在软件中设计与上述解剖形态一致的反向模板并将其与椎弓根螺钉的最优钉道拟合为一体,最终形成带有2个定位导向孔的导板。将椎体三维模型及导板文件以STL文件保存后输入3DS Project 3600型光敏树脂打印设备(3DS company,The United States)打印出椎体三维模型及导航模板。
3.角度控制组合式椎弓根螺钉植入工具结合导板植入螺钉
患者取俯卧位,考虑到术中因体位因素对数据的影响,故在摆好体位后采用水平仪进行检测,若不符合要求,则重新调整患者术前体位,直至符合要求为止。术前进行椎体三维模型及导板灭菌,预先在3D模型上进行模拟植钉,并在模型测量螺钉植入的外展及头、尾向倾角度。术中充分剥离椎体后缘组织结构,显露椎体棘突、椎板和关节突关节,将导板紧密贴附于椎体人字脊,助手协助固定导板,术者使用角度控制组合式椎弓根螺钉植入工具,按照椎体3D模型上所模拟得到的外展及头、尾向倾角度,调整术者螺钉植入角度,使角度控制组合式椎弓根螺钉植入工具上两个角度表的数值与模拟数值一致后植入螺钉。
图2为本发明椎弓根螺钉植入方法的流程图。
第一步:组装角度控制工具
角度手柄上安装有重力指针、360°刻度表盘,角度手柄在偏转的过程中可读取其偏转角度,角度手柄安装2个互成90°的表盘,控制椎弓根螺钉植入水平面角度(TSA)及矢状面角度(SSA)。
步骤2:导板制作及椎体3D打印
1)制作导板:
①收集患者术前手术节段椎体CT平扫(层厚0.5mm)资料
②DICOM格式保存
③导入Mimics 17.0三维模型重建
④重建模型以STL格式导入3-Matic21.0软件
⑤模拟螺钉的位置、方向、直径,设计最优钉道,提取椎体棘突、椎板、关节突的形态解剖;
⑥设计反向模板,形成带有2个定位导向孔的导板;
⑦椎体三维模型及导板文件保存后输入3DS Project 3600型光敏树脂打印设备打印出椎体三维模型及导航模板。
2)将导板紧贴于骨面。
步骤3:将角度控制组合式椎弓根螺钉植入工具置于导板孔,调整互相垂直的两个角度表,使其角度表上数值与术前椎体CT测量数值相同后,植入椎弓根螺钉。
图3中,10为导板,11为3D椎体模型。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种椎弓根螺钉的植入方法
- 一种新型椎弓根螺钉及其植入方法