一种无人艇区域保持控制方法及装置
文献发布时间:2023-06-19 10:35:20
技术领域
本申请涉及无人艇控制技术,尤其涉及一种无人艇区域保持控制方法及装置。
背景技术
近年来无人艇在军用和民用领域的应用日益广泛。无人艇可搭载多种任务载荷代替有人驾驶船舶在危险特殊水域执行任务,诸如对指定区域进行水样气象监测,在特殊条件下提供中继通信支持,或对不明海域进行情报搜集环境探测以及配合水下潜器执行区域作业等。上述任务都要求无人艇在作业的同时保持在规定区域内,即具备区域保持能力。
现有的区域保持控制技术主要包括:一锚泊控制,即依靠沉于海底的锚抓力来抵抗外界环境干扰;二采用船舶自身动力或动力定位系统进行控制,即利用船舶上的推进装置产生推力来抵抗外界环境干扰,使船舶保持在规定区域内。
无人艇由于体型小、结构简单,受空间等因素限制、缺少横向驱动装置,也无法安装锚泊或动力定位系统,所以不同于全驱动动力定位船或者大型海洋工作平台,无法采用锚泊或动力定位系统实现区域保持。同时,无人艇具有欠驱动性、高度非线性、强耦合性,易受外界环境干扰影响,因此无人艇区域保持的实现也比较困难。此外,区域保持控制不同于跟踪控制,它只需在外界环境干扰下保证无人艇保持在规定作业区域内不超出区域边界即可,对于无人艇的运动方式、控制精度和收敛速度不作要求。所以,如何通过较低的代价,来获得接近于时间触发的控制效果,避免推进器频繁动作,是欠动力无人艇在区域保持技术方面亟待解决的现实问题。
发明内容
(一)发明目的
针对现有技术的上述缺陷,本申请提出了一种无人艇区域保持控制方法,所述方法通过引入障碍李雅普诺夫函数将区域保持问题转化为具有输出状态变量约束系统的控制问题,简化了区域保持控制策略,并进一步通过设置事件触发机制,在完成区域保持的同时降低了推进器动作频率,延长了推进器使用寿命。
(二)技术方案
为解决上述问题,本申请实施例的第一方面提供了一种无人艇区域保持控制方法,包括:
根据未知时变外界环境干扰下无人艇的三自由度运动方程确定所述无人艇的虚拟控制律;
根据所述虚拟控制律确定所述无人艇当前时点的期望纵、横向速度;
根据未知时变外界环境干扰下所述无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度跟踪的非线性滑模面;
在所述非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器,所述鲁棒滑模控制器用于向所述无人艇的推进器发出区域保持的控制信号;
根据预设的所述跟踪误差的阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件;
当所述事件触发条件满足时,所述鲁棒滑模控制器发送所述控制信号给所述无人艇的推进器,实现所述无人艇的区域保持控制。
一些实施例中,所述方法还包括:
当所述触发条件不满足时,通过零阶保持器使所述推进器接收到的所述控制信号保持不变。
一些实施例中,所述三自由度运动方程为:
其中,η=[x,y,ψ]
一些实施例中,根据未知时变外界环境干扰下无人艇的三自由度运动方程确定所述无人艇的虚拟控制律,包括:
设定所述无人艇初始位置和速度跟踪误差x
由式(2)确定所述无人艇纵、横向期望速度的虚拟控制律式如式(3):
其中,x
一些实施例中,根据未知时变外界环境干扰下所述无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度跟踪的非线性滑模面,包括:
将所述无人艇的规定区域的中心作为圆心O(0,0),r作为区域半径,期望航迹半径为r
设定区域保持误差变量
将所述无人艇的运动航迹设定在所述规定区域内;
为使所述无人艇跟踪期望速度α
其中,待确定参数ξ
一些实施例中,在所述非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器,包括:
对式(9)(9)和(10)(10)求导,并将式(1)和(2)代入得:
选取等速趋近律如式(13)、(14):
其中,C
取
其中,中间变量形式如下:
一些实施例中,根据预设的所述跟踪误差的阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件,包括:
定义t
τ
定义跟踪误差阈值如下:
根据跟踪误差阈值的定义,事件触发的区域保持鲁棒滑模控制器(20)重写为式(23);
τ
为了采用时间触发鲁棒滑模控制器的稳定性分析方法,将上述控制器连续化表示如下:
τ
设定初始跟踪误差的范数满足||[x
其中,紧集S
为了使区域保持误差变量d
对式(26)求导,并结合式(24)、(25)可知:
得出初始事件触发条件如下:
t
进一步确定鲁棒滑模控制器的触发条件可表示如下:
t
其中,
本申请实施例的第二方面提供了一种无人艇区域保持控制装置,包括:
虚拟控制律确定模块,用于根据未知时变外界环境干扰下无人艇的三自由度运动方程确定所述无人艇的虚拟控制律;
期望速度确定模块,用于根据所述虚拟控制律确定所述无人艇当前时点的期望纵、横向速度;
非线性滑模面确定模块,用于根据未知时变外界环境干扰下所述无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度变化的非线性滑模面;
鲁棒滑模控制器确定模块,用于在所述非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器,所述鲁棒滑模控制器用于向所述无人艇的推进器发出区域保持的控制信号;
事件触发条件设置模块,用于依据预设的所述无人艇的跟踪误差阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件,所述跟踪误差阈值包括所述无人艇的位置误差,速度误和/或区域保持误差;
控制信号发送模块,用于当所述事件触发条件满足时,所述鲁棒滑模控制器发送所述控制信号给所述无人艇的推进器,实现所述无人艇的区域保持控制。
本申请实施例的第三方面提供了一种电子设备,包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现上述任一项所述的方法
本申请实施例的第四方面提供了一种无人艇,所述无人艇采用了上述的区域保持控制装置。
(三)有益效果
本申请的上述技术方案具有如下有益的技术效果:
本申请实施例根据未知时变外界环境干扰下无人艇的三自由度运动方程确定无人艇的虚拟控制律,根据虚拟控制律确定所述无人艇当前时点的期望纵、横向速度;通过无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度跟踪的非线性滑模面;进而在非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器。并根据预设的所述跟踪误差的阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件;当所述事件触发条件满足时,所述鲁棒滑模控制器发送所述控制信号给所述无人艇的推进器,实现所述无人艇的区域保持控制。其通过引入障碍李雅普诺夫函数将区域保持问题转化为具有输出状态变量约束系统的控制问题,简化了区域保持控制策略,并进一步通过设置事件触发机制,在完成区域保持的同时降低了推进器动作频率,延长了推进器使用寿命。
附图说明
图1是本申请实施例控制方法的流程示意图;
图2是本申请实施例中无人艇在北东坐标系和船体坐标系下的示意图;
图3是本申请实施例中鲁棒滑模控制器的事件触发原理框图,其中,u(t),y(t)表示闭环控制系统的输入和输出,x(t)表示系统状态。
图4是本申请实施例中无人艇区域保护控制的控制原理框图;
图5是本申请实施例控制装置的结构框图。
具体实施方式
为使本申请的目的、技术方案和优点更加清楚明了,下面结合具体实施方式并参照附图,对本申请进一步详细说明。应该理解,这些描述只是示例性的,而并非要限制本申请的范围。此外,在以下说明中,省略了对公知结构和技术的描述,以避免不必要地混淆本申请的概念。
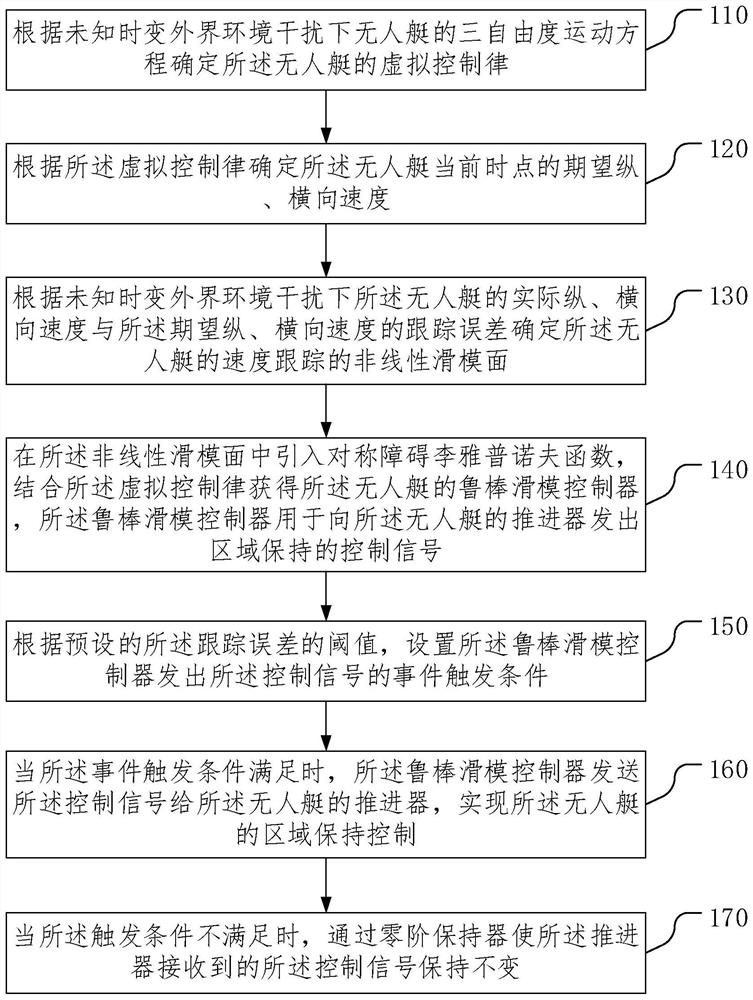
图1是本申请实施例控制方法的流程示意图。
如图1所示,本申请第一方面提供了一种无人艇区域保持控制方法,包括:
步骤110:根据未知时变外界环境干扰下无人艇的三自由度运动方程确定所述无人艇的虚拟控制律;
步骤120:根据所述虚拟控制律确定所述无人艇当前时点的期望纵、横向速度;
步骤130:根据未知时变外界环境干扰下所述无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度跟踪的非线性滑模面;
步骤140:在所述非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器,所述鲁棒滑模控制器用于向所述无人艇的推进器发出区域保持的控制信号;
步骤150:根据预设的所述跟踪误差的阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件;
步骤160:当所述事件触发条件满足时,所述鲁棒滑模控制器发送所述控制信号给所述无人艇的推进器,实现所述无人艇的区域保持控制。
一些实施例中,所述方法还包括:
步骤170:当所述触发条件不满足时,通过零阶保持器使所述推进器接收到的所述控制信号保持不变。
图2是本申请实施例中无人艇在北东坐标系和船体坐标系下的示意图。
如图2所示,步骤110中无人艇在北东坐标系下的三自由度运动方程为:
其中,η=[x,y,ψ]
步骤110中根据未知时变外界环境干扰下无人艇的三自由度运动方程确定所述无人艇的虚拟控制律,包括:
设定所述无人艇初始位置和速度跟踪误差x
由式(2)确定所述无人艇纵、横向期望速度的虚拟控制律式如式(3):
其中,x
步骤130中根据未知时变外界环境干扰下所述无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度跟踪的非线性滑模面,包括:
将所述无人艇的规定区域的中心作为圆心O(0,0),r作为区域半径,期望航迹半径为r
设定区域保持误差变量
将所述无人艇的运动航迹设定在所述规定区域内;
为使所述无人艇跟踪期望速度α
其中,待确定参数ξ
图3是本申请实施例中鲁棒滑模控制器的事件触发原理框图,其中,u(t),y(t)表示闭环控制系统的输入和输出,x(t)表示系统状态。
如图3所示,步骤140中在所述非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器,包括:
对式(9)(9)和(10)(10)求导,并将式(1)和(2)代入得:
选取等速趋近律如式(13)、(14):
其中,C
取
其中,中间变量形式如下:
步骤150根据预设的所述跟踪误差的阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件,包括:
定义t
τ
定义跟踪误差的阈值如下:
根据跟踪误差阈值的定义,事件触发的区域保持鲁棒滑模控制器(20)重写为式(23);
τ
为了采用时间触发鲁棒滑模控制器的稳定性分析方法,将上述控制器连续化表示如下:
τ
设定初始跟踪误差的范数满足||[x
其中,紧集S
为了使区域保持误差变量d
对式(26)求导,并结合式(24)、(25)可知:
得出初始事件触发条件如下:
t
进一步确定鲁棒滑模控制器的触发条件可表示如下:
t
其中,
图4是本申请实施例中无人艇区域保护控制的控制原理框图。
一些实施例中,如图4所示,本申请无人艇区域保护控制方法包括:
步骤1:先确定未知时变外界环境干扰下的无人艇三自由度运动方程如下:
其中,η=[x,y,ψ]
定义无人艇位置和速度跟踪误差x
为避免虚拟控制律的设计缺陷结合注释1,设计期望纵向和横向速度即虚拟控制律如下:
其中,x
根据式(1)和(3)可得(4)如下:
将式(3)和(4)代入式(2)得式(5)如下:
其中,
然后,构造如下李雅普诺夫函数V
将V
已知k
步骤2:假定无人艇的规定区域是以O(0,0)为圆心,r为半径的圆形区域,期望航迹半径为r
其中,待设计参数ξ
对式(9)和(10)求导,并将式(9)和(10)分别代入(1)和(2)得:
选取等速趋近律如下:
其中,C
然后,取
其中,中间变量形式如下:
步骤3:为了得到无人艇事件触发区域保持鲁棒滑模控制器,定义
τ
为了便于进一步分析,定义跟踪误差阈值如下:
对于每个j,e
τ
为了采用时间触发鲁棒滑模控制器的稳定性分析方法,将上述控制器连续化表示如下:
τ
由于事件触发机制的时间序列是由事件触发条件动态确定的,下面将推导事件触发条件以便确定控制律(20)的更新时间。
从实际应用看,初始跟踪误差的范数满足||[x
其中,紧集S
为了使区域保持误差变量d
对式(26)求导,并结合式(24)(25)可知:
由于事件触发区域保持鲁棒滑模饱和控制器更新时间t
t
这里假设初始更新时间触发之前推进器不工作,即τ
最终,事件触发区域保持鲁棒滑模控制器的触发条件可表示如下:
t
其中,
图5是本申请实施例控制装置的结构框图。
如图5所示,本申请第二方面提供了一种无人艇区域保持控制装置,包括:
虚拟控制律确定模块001,用于根据未知时变外界环境干扰下无人艇的三自由度运动方程确定所述无人艇的虚拟控制律;
期望速度确定模块002,用于根据所述虚拟控制律确定所述无人艇当前时点的期望纵、横向速度;
非线性滑模面确定模块003,用于根据未知时变外界环境干扰下所述无人艇的实际纵、横向速度与所述期望纵、横向速度的跟踪误差确定所述无人艇的速度变化的非线性滑模面;
鲁棒滑模控制器确定模块004,用于在所述非线性滑模面中引入对称障碍李雅普诺夫函数,结合所述虚拟控制律获得所述无人艇的鲁棒滑模控制器,所述鲁棒滑模控制器用于向所述无人艇的推进器发出区域保持的控制信号;
事件触发条件设置模块005,用于依据预设的所述无人艇的跟踪误差阈值,设置所述鲁棒滑模控制器发出所述控制信号的事件触发条件,所述跟踪误差阈值包括所述无人艇的位置误差,速度误和/或区域保持误差;
控制信号发送模块006,用于当所述事件触发条件满足时,所述鲁棒滑模控制器发送所述控制信号给所述无人艇的推进器,实现所述无人艇的区域保持控制。
一些实施例中,所述控制装置还包括:
控制信号保持模块007,用于当所述触发条件不满足时,通过零阶保持器使所述推进器接收到的所述控制信号保持不变。
本申请第三方面提供了一种电子设备,包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现上述任一方法实施例述的控制方法。
本申请第四方面提供了一种无人艇,该无人艇采用了上述装置实施例所述的区域保持控制装置。
应当理解的是,本申请的上述具体实施方式仅仅用于示例性说明或解释本申请的原理,而不构成对本申请的限制。因此,在不偏离本申请的精神和范围的情况下所做的任何修改、等同替换、改进等,均应包含在本申请的保护范围之内。此外,本申请所附权利要求旨在涵盖落入所附权利要求范围和边界、或者这种范围和边界的等同形式内的全部变化和修改例。
- 一种无人艇区域保持控制方法及装置
- 一种水面无人艇区域保持控制系统及方法