一种四摄像头接触线测量仪的标定方法与装置
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及接触线测量技术领域,具体涉及一种四摄像头接触线测量仪的标定方法与装置。
背景技术
电气化铁路上,列车电源是通过车厢上方的接触线来提供的,接触线相对于铁轨的位置关系(高度、偏离轨道中心线的距离)是铁路运行维护中需要检测的。四摄像头接触线测量仪是一种非常方便的接触线测量仪,但四摄像头接触线测量仪本身涉及四个摄像头,每个摄像头的安装位置精度、镜头畸变等等都影响测量精度,用传统的解析法来分析测量误差需要精确测量每一个摄像头的镜头参数、镜头畸变量、安装位置、角度,这样使得仪器标定非常困难,而且每一项测量误差叠加后可能产生放大效应,从而降低仪器的标定精度。
发明内容
解决的技术问题
针对现有技术所存在的上述缺点,本发明提供了一种四摄像头接触线测量仪的标定方法与装置,用来解决传统的解析法标定困难,误差较大,降低了仪器标定精度的问题。
技术方案
为实现以上目的,本发明通过以下技术方案予以实现:
一种四摄像头接触线测量仪的标定方法,包括以下操作步骤:
步骤S1:通过两个二维可控移动平台测量出接触线的实际位置(x,y);
步骤S2:手持四摄像头接触线测量仪拍摄得到两副铁轨图像和两幅接触线图像;
步骤S3:对步骤S2拍摄得到的铁轨图像和接触线图像进行抽象处理,其中,将铁轨图像中的两条钢轨抽象成两条直线,将接触线图像抽象成一条直线,并列出六条直线方程式:y=kx+b(k为拍摄图像中铁轨参数;b为拍摄图像中接触线参数);
步骤S4:将步骤S3中所述六条直线方程式和接触线实际位置作为一个样本,样本形式参数包括:k1,b1,k2,b2,k3,b3,k4,b4,k5,b5,k6,b6,x,y;
步骤S5:按照步骤S1-S4获取多个样本M(M≥100),并且将样本分为两组;
步骤S6:通过步骤S5获取的样本M构建人工神经网络,通过构建的人工神经网络训练样本,并将人工神经网络的训练结果作为四摄像头接触线测量仪的标定结果。
更进一步地,步骤S5中的接触线实际位置(x,y)在整个样本空间均匀分布,同时空间位置相邻的两个样本不分在同一组。
更进一步地,步骤S6还包括以一组样本训练人工神经网络,再用另一组样本检验训练结果,若人工神经网络的训练结果不满足误差要求,重新训练至满足误差为止。
一种四摄像头接触线测量仪的标定装置,包括一对二维可控移动平台、接触线、标准铁轨和控制电脑,两个所述接触线和标准铁轨按照实际情景搭建,同时二维可移动平台分别滑动设置在接触线和标准铁轨两侧。
有益效果
采用本发明提供的技术方案,与已知的公有技术相比,具有如下有益效果:
本发明采用黑盒标定方法,不需要精确测量每一个摄像头的参数和误差,对摄像头安装精度没有要求,并且提高了标定精度,有助于更加精准地测量。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
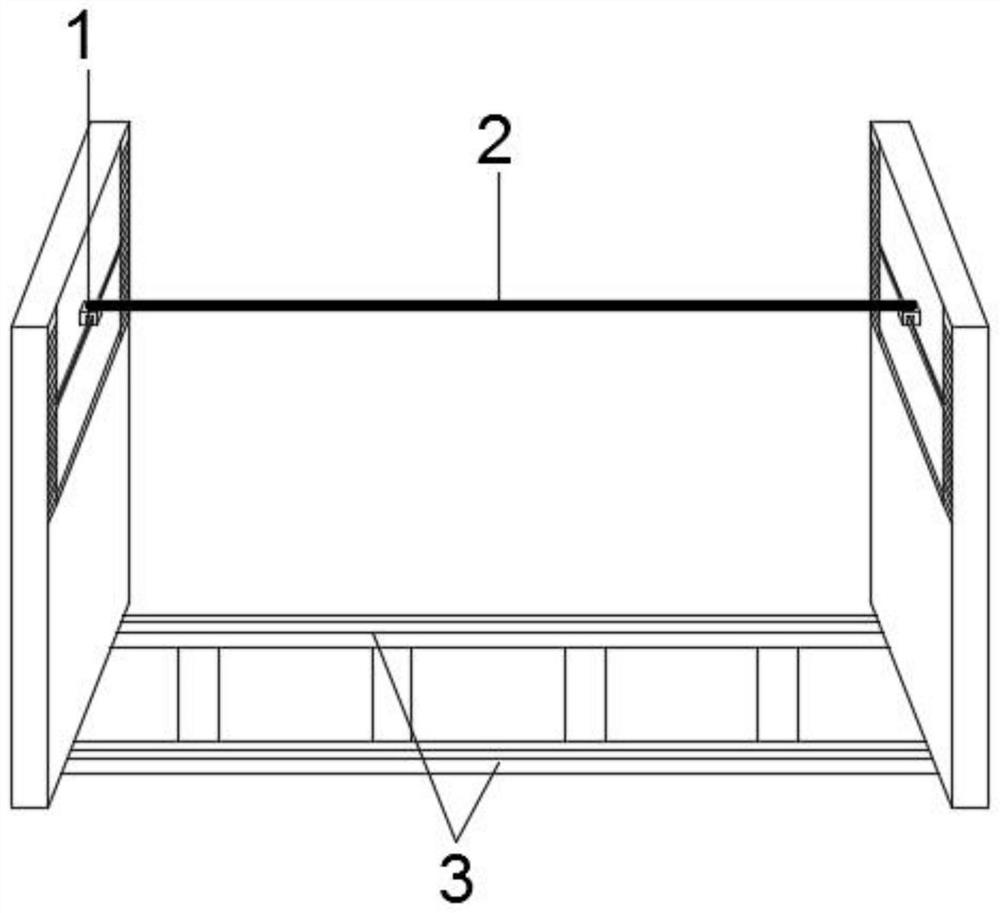
图1为本发明装置结构示意图;
图2为本发明的构建的人工神经网络示意图;
图中的标号分别代表:1-二维可控移动平台;2-接触线;3-标准铁轨。
具体实施方式
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
下面结合实施例对本发明作进一步的描述。
实施例
本实施例的一种四摄像头接触线测量仪的标定方法与装置,参照图1-:一种四摄像头接触线测量仪的标定方法,包括以下操作步骤:
步骤S1:通过两个二维可控移动平台1测量出接触线的实际位置(x,y);
步骤S2:手持四摄像头接触线测量仪拍摄得到两副铁轨图像和两幅接触线图像;
步骤S3:对步骤S2拍摄得到的铁轨图像和接触线图像进行抽象处理,其中,将铁轨图像中的两条钢轨抽象成两条直线,将接触线图像抽象成一条直线,并列出六条直线方程式:y=kx+b(k为拍摄图像中铁轨参数;b为拍摄图像中接触线参数);
步骤S4:将步骤S3中六条直线方程式和接触线实际位置作为一个样本,样本形式参数包括:k1,b1,k2,b2,k3,b3,k4,b4,k5,b5,k6,b6,x,y;
步骤S5:按照步骤S1-S4获取多个样本M(M≥100),并且将样本分为两组;
步骤S6:通过步骤S5获取的样本M构建人工神经网络,通过构建的人工神经网络训练样本,并将人工神经网络的训练结果作为四摄像头接触线测量仪的标定结果。
步骤S5中的接触线实际位置(x,y)在整个样本空间均匀分布,同时空间位置相邻的两个样本不分在同一组。
步骤S6还包括以一组样本训练人工神经网络,再用另一组样本检验训练结果,若人工神经网络的训练结果不满足误差要求,重新训练至满足误差为止。
一种四摄像头接触线测量仪的标定装置,包括一对二维可控移动平台1、接触线2、标准铁轨3和控制电脑,两个接触线2和标准铁轨3按照实际情景搭建,同时二维可移动平台1分别滑动设置在接触线2和标准铁轨3两侧。
工作原理:以拍摄和计算的方式获取多个包含六条直线方程式:y=kx+b(k为拍摄图像中铁轨参数;b为拍摄图像中接触线参数)和接触线实际位置的样本M,然后通过多个样本M构建人工神经网络;将实测的一组样本训练人工神经网络,再用另一组样本检验训练结果,若人工神经网络的训练结果不满足误差要求,重新训练至满足误差为止,并将该符合误差要求的训练结果作为四摄像头接触线测量仪的标定结果,本发明采用黑盒标定方法,不需要精确测量每一个摄像头的参数和误差,对摄像头安装精度没有要求,并且提高了标定精度,有助于更加精准地测量。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不会使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种四摄像头接触线测量仪的标定方法与装置
- 一种四摄像头同步拍摄测量接触线的方法与装置