一种尾坐飞机垂直起降控制方法
文献发布时间:2023-06-19 10:41:48
技术领域
本申请属于飞行器设计技术领域,特别涉及一种尾坐飞机垂直起降控制方法。
背景技术
尾坐飞机是指能够垂直起降的飞机,且在垂直起降过程中,机体尾部呈坐立状态,对尾坐垂直起降飞机,垂直起降阶段,机翼和机身处于竖直状态,此时发动机拉力/推力向上,平衡飞机重力;平飞巡航阶段,机翼升力平衡飞机重力,发动机拉力/推力平衡飞机阻力。该类飞机兼具直升机的垂直起和固定翼飞机高速高效巡航的优点。与此同时,垂直起降阶段由于机翼处于竖直状态,非定常干扰突风(尤其是垂直机翼平面的突风)在机翼上产生较大非定常风扰气动力。首先,非定常风扰气动力对起降轨迹和姿态精准控制不利,极大增加了飞控系统设计难度;其次为抵抗水平风扰气动力,需要通过发动机产生额外拉力,增加了起飞发动机功率需求。上述原因导致尾坐飞机垂直起降抗突风能力偏低,使该类飞机难以在强突风条件下起降,极大限制了该类飞机的推广使用。降低垂直起降阶段突风干扰气动力,提高飞机垂直起降抗突风能力,是该类飞机推广使用亟待解决的问题之一。
发明内容
尾坐飞机垂直起降阶段,机翼是风扰气动力的主要来源部件。为减小尾坐飞机垂直起降阶段突风在机翼上的风扰气动力,提高该类飞机的垂直起降抗风能力,本发明提供了一种降低尾坐飞机垂直起降突风干扰的控制方法。
本申请尾坐飞机垂直起降控制方法,主要包括:
步骤S1、获取设置在机翼两个板面上的传感器的静压差值;
步骤S2、根据所述静压差值确定飞机机翼所受的突风的前后方向;
步骤S3、根据设置在机翼翼尖的多个传感器确定飞机机翼所受的突风的左右方向,确定机翼与突风的夹角;
步骤S4、在所述尾坐飞机的垂直起飞过程中,产生使机翼与突风夹角减小的方向进行偏转的偏转力矩,控制机翼偏转。
优选的是,步骤S1中,飞机两侧的机翼的前后板面上均设置有静压传感器,同一侧的机翼的前后板面的两个静压传感器均连接至一差压传感器。
优选的是,步骤S4之前进一步包括,当两个差压传感器获得的静压差均大于设定值时,产生偏转力矩。
优选的是,所述设定值为50Pa。
优选的是,步骤S3中,每一个机翼的翼尖处设置有四个静压传感器,当飞机处于垂直起降时,四个静压传感器分别设置在翼尖的同一水平面的前后左右四个方向。
优选的是,四个静压传感器通过压力探测杆固定在机翼翼尖处,所述压力探测杆上设置有前后左右四个方向的静压孔,每个静压孔通过静压管连接器内部的及静压传感器。
优选的是,步骤S4中,产生偏转力矩包括:
控制飞机左右两侧的升降副翼后缘的前后方向的偏转,产生使左机翼及右机翼向相反方向运动的偏转力矩。
优选的是,步骤S4中,产生偏转力矩包括:
控制飞机前后垂尾上的方向舵的左右方向的偏转,产生使左机翼及右机翼向相反方向运动的偏转力矩。
优选的是,步骤S4中,所述尾坐飞机的垂直起飞过程包括飞机自地面至爬升至高度差为200倍机身长度的空中的爬升过程,或者反向降落过程。
本发明提供的尾坐飞机垂直起降控制方法,能够降低尾坐飞机垂直起降过程中的突风干扰,具有如下有益效果:
1.减小突风干扰气动力,提高尾坐飞机垂直起降轨迹和姿态控制精度。
垂直起降状态,任意方向水平风扰气动力对于飞控系统是随机的系统外部扰动。风扰气动力越大,垂直起降轨迹和控制精度的降低。相比机翼对称构型的尾坐飞机,本发明采用机翼非对称构型技术,可减小突风干扰气动力,减小起降状态飞控系统外部扰动,提高尾坐飞机垂直起降轨迹和姿态控制精度。
2.减小风扰气动力,减小为抵抗风扰气动力所消耗的发动机额外功率。
垂直起降状态,水平风扰产生的气动力,需要通过偏转舵面或者调整飞机姿态改变发动机推/拉力方向,产生大小相等方向相反的力与之平衡。风扰气动力越大,为平衡风扰气动力所损失的拉力越多,消耗的发动机功率越大。相比机翼对称构型的尾坐飞机,本发明采用机翼非对称构型技术,减小为抵抗风扰气动力所消耗的发动机功率。
附图说明
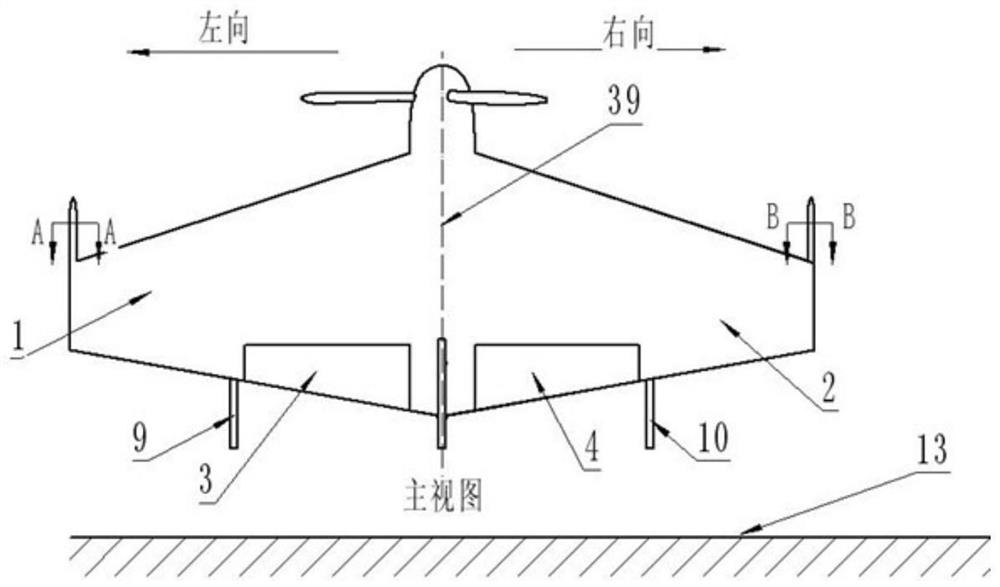
图1是本申请尾坐飞机垂直起降控制方法的尾坐飞机主视图。
图2是本申请图1所示实施例的尾坐飞机侧视图。
图3是本申请图1所示实施例的尾坐飞机俯视图。
图4是本申请图3所示实施例的左侧机翼处C处放大示意图。
图5是本申请图3所示实施例的左侧机翼处D处放大示意图。
图6是本申请图1所示实施例的A-A剖处放大示意图。
图7是本申请图1所示实施例的B-B剖处放大示意图。
图8是本申请图1所示实施例的左前向突风示意图。
图9是本申请图1所示实施例的右前向突风示意图。
图10是本申请图1所示实施例的左后向突风示意图。
图11是本申请图1所示实施例的右后向突风示意图。
图12是本申请图1所示实施例的机翼与突风夹角α定义示意图。
图13是本申请为减小左前向突风与机翼夹角舵面操纵示意图。
图14是本申请机翼与突风夹角减小至控制阈值范围内后流动示意图。
图15是本申请突风机翼夹角从45°减小至0,绝对突风气动力减小曲线。
图16是本申请突风机翼夹角从45°减小至0,相对绝对突风气动力减小曲线。
具体实施方式
为使本申请实施的目的、技术方案和优点更加清楚,下面将结合本申请实施方式中的附图,对本申请实施方式中的技术方案进行更加详细的描述。在附图中,自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。所描述的实施方式是本申请一部分实施方式,而不是全部的实施方式。下面通过参考附图描述的实施方式是示例性的,旨在用于解释本申请,而不能理解为对本申请的限制。基于本申请中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本申请保护的范围。下面结合附图对本申请的实施方式进行详细说明。
本申请尾坐飞机垂直起降阶段,机翼和机身处于竖直状态。水平风在机翼上产生较大干扰气动力,不利于起降轨迹和姿态控制。通过在机翼布置压力传感器,识别突风方向,首先识别尾坐飞机垂直起降所遭遇突风前后方向,其次在识别前后方向的基础上,识别突风的左右方向。通过控制舵面左右差动升降副翼,使飞机产生绕机身轴线的偏转力矩,偏转力矩方向向着机翼与水平风夹角减小的方向。在偏转力矩作用下,机翼与突风方向减小直至减小为零,从而减小突风在机翼上的干扰气动力,提高尾坐飞机垂直起降阶段的抗风能力。
本申请提供了一种尾坐飞机垂直起降控制方法,主要包括:
步骤S1、获取设置在机翼两个板面上的传感器的静压差值;
步骤S2、根据所述静压差值确定飞机机翼所受的突风的前后方向;
步骤S3、根据设置在机翼翼尖的多个传感器确定飞机机翼所受的突风的左右方向,确定机翼与突风的夹角;
步骤S4、在所述尾坐飞机的垂直起飞过程中,产生使机翼与突风夹角减小的方向进行偏转的偏转力矩,控制机翼偏转。
在一些可选实施方式中,步骤S1中,飞机两侧的机翼的前后板面上均设置有静压传感器,同一侧的机翼的前后板面的两个静压传感器均连接至一差压传感器。
参考图1至图3,图1中,尾坐飞机包括左机翼1及右机翼2,左机翼1下设置有左侧升降副翼3,对应的右机翼2下设置有右侧升降副翼4,图2为图1的侧视图,该视图给出了飞机前后方向的前向垂尾5及后向垂尾6,前向垂尾5下设置有前垂尾上的方向舵7,后向垂尾6下设置有后垂尾上的方向舵8。另外,图1中还给出了左侧起落支架9及右侧起落支架10,飞机的机身轴线39。图2中给出了前侧起落支架11及后侧起落支架12。图1及图2中,还包括起降支撑平面13。图3中,飞机包括三个螺旋桨叶,分别为第一片螺旋桨桨叶14、第二片螺旋桨桨叶15以及第三片螺旋桨桨叶16。
本申请在飞机两侧的机翼的前后板面上均设置有静压传感器,如图4及图5,分别为左机翼前向静压测点的测压管17,该测点静压定义为:P17;左机翼后向静压测点的测压管18,该测点静压定义为:P18;左机翼测点17和18的差压传感器19,差压传感器输入结果定义为:dP17m18=P17-P18;右机翼前向静压测点的测压管20,该测点静压定义为:P20;右机翼后向静压测点的测压管21,该测点静压定义为:P21;左机翼20和21的差压传感器22,差压传感器输入结果定义为:dP20m21=P20-P21。
在步骤S2中,根据所述静压差值确定飞机机翼所受的突风的前后方向包括:
a)如果同时满足如下条件:
dP17m18>0;
dP20m21>0;
dP17m18的绝对值:abs(dP17m18)>Pthreshold;
dP20m21的绝对值:abs(dP20m21)>Pthreshold;
则确定突风方向是从前往后方向。
b)如果满足如下条件:
dP17m18<0;
dP20m21<0;
dP17m18的绝对值:abs(dP17m18)>Pthreshold;
dP20m21的绝对值:abs(dP20m21)>Pthreshold;
则确定突风方向是从后往前方向。
其中Pthreshold为差压最小容限绝对值,该值表示判断灵敏度,值越小,灵敏度越高。该值范围可随灵敏度需求进行调整,例如取:50Pa。
在一些可选实施方式中,步骤S3中,每一个机翼的翼尖处设置有四个静压传感器,当飞机处于垂直起降时,四个静压传感器分别设置在翼尖的同一水平面的前后左右四个方向。
在一些可选实施方式中,四个静压传感器通过压力探测杆固定在机翼翼尖处,所述压力探测杆上设置有前后左右四个方向的静压孔,每个静压孔通过静压管连接器内部的及静压传感器。
该实施例通过压力探测杆安装了两组静压传感器,如图6所示为左侧机翼翼尖的传感器示意图,包括左机翼翼尖压力探测杆第一个静压孔和静压管23;左机翼翼尖压力探测杆第一个静压传感器24,其输出结果定义为:P24;左机翼翼尖压力探测杆第二个静压孔和静压管25;左机翼翼尖压力探测杆第二个静压传感器26,其输出结果定义为:P26;左机翼翼尖压力探测杆第三个静压孔和静压管27;左机翼翼尖压力探测杆第三个静压传感器28,其输出结果定义为:P28;左机翼翼尖压力探测杆第四个静压孔和静压管29;左机翼翼尖压力探测杆第四个静压传感器30,其输出结果定义为:P30。
如图7所示为右侧机翼翼尖的传感器示意图,包括右机翼翼尖压力探测杆第一个静压孔和静压管31;右机翼翼尖压力探测杆第一个静压传感器32,其输出结果定义为:P32;右机翼翼尖压力探测杆第二个静压孔和静压管33;右机翼翼尖压力探测杆第二个静压传感器34,其输出结果定义为:P34;右机翼翼尖压力探测杆第三个静压孔和静压管35;右机翼翼尖压力探测杆第三个静压传感器36,其输出结果定义为:P36;右机翼翼尖压力探测杆第四个静压孔和静压管37;右机翼翼尖压力探测杆第四个静压传感器38,其输出结果定义为:P38。
步骤S3中,识别突风左右方向主要包括:
a)如果突风方向是从前往后方向
如果满足:P24>P26且P32>P34,则确定突风方向为左前方。流动机理见图8。
如果满足:P24<P26且P32<P34,则确定突风方向为右前方。流动机理见图8。
b)如果突风方向是从后往前方向
如果满足:P30>P28,且P38>P36,则确定突风方向为左后方。流动机理见图10。
如果满足:P30<P28,且P38<P36,则确定突风方向为右后方。流动机理见图11。
在一些可选实施方式中,步骤S4中,产生偏转力矩包括:
控制飞机左右两侧的升降副翼后缘的前后方向的偏转,产生使左机翼及右机翼向相反方向运动的偏转力矩。
在一些可选实施方式中,步骤S4中,产生偏转力矩包括:
控制飞机前后垂尾上的方向舵的左右方向的偏转,产生使左机翼及右机翼向相反方向运动的偏转力矩。
步骤S4中,通过控制产生使机翼与风向夹角减小的偏转力矩,具体包括:
a)对于左前向突风和右后向突风,通过操纵手段,产生绕机身轴线,使右机翼向后,左机翼向前的偏转力矩。产生以上使右机翼向后左机翼向前的偏转力矩的手段,包括但不限于以下方法:
方法一:左侧升降副翼3后缘向后偏转,右侧升降副翼4后缘向前转,在螺旋桨向下滑流的作用下,产生使右机翼向后左机翼向前的偏转力矩。
方法二:前向垂尾方向舵7后缘向左偏转,后向方向舵8后缘向右偏转,在螺旋桨向下滑流的作用下,产生使右机翼向后左机翼向前的偏转力矩。
b)对于右前向突风和左后向突风,通过操纵手段,产生绕机身轴线,使左机翼向后,右机翼向前的偏转力矩。产生以上使左机翼向后右机翼向前的偏转力矩的手段,包括但不限于以下方法:
方法一:左侧升降副翼3后缘向前偏转,右侧升降副翼4后缘向后转,在螺旋桨向下滑流作用下,产生使左机翼向后右机翼向前的偏转力矩。
方法二:前向垂尾方向舵7后缘向右偏转,后向方向舵8后缘向左偏转,在螺旋桨向下滑流作用下,产生使左机翼向后右机翼向前的偏转力矩。
本实施例中,机翼与突风方向的夹角α定义如下:过螺旋桨圆心平行突风方向的直线与右机翼形成的锐角。对左前向突风,机翼与突风方向的夹角α见图12。在上述偏转力矩作用下,机翼与突风夹角逐渐减小。
当满足如下条件时:dP17m18的绝对值abs(dP17m18)≤Pthreshold,且dP20m21的绝对值:abs(dP20m21)≤Pthreshold,停止产生使机翼与风向夹角减小的偏转力矩,为产生上述偏转力矩而的舵面偏转增量赋值为零。此时由于机翼与突风夹角减小,突风在机翼上的风扰气动力减小,从而减小突风对尾坐飞机的突风干扰气动力。
在一些可选实施方式中,步骤S4中,所述尾坐飞机的垂直起飞过程包括飞机自地面至爬升至高度差为200倍机身长度的空中的爬升过程,或者反向降落过程。
备选实施方式中,除机身长度外,还可以是其它特征长度,例如机身高度、翼展长度等,具体的,垂直起飞过程,从飞离开停放地点开始,到爬升至与停放地点高度差为200倍特征长度(为机身长度、机身高度和机翼展长三者最大值)结束;垂直降落过程,从距离着陆点高度差为200倍特征长度开始,到飞机停落在着陆地点结束。
本申请动力装置、机翼(舵面除外)与机身夹角不变;垂直起降阶段,机翼处于垂直状态,不产生升力;通过发动机拉力/推力克服重力,完成垂直起降。
以下为具体算例。
机翼面积:S=10㎡;
起飞总重:m=2000kg;
机翼展长:L=10m;
该机在垂直起降过程中,遭遇10级风(风速28.5m/s),以突风方向是左前方,突风与机翼夹角α=45°(α定义示意图见图12)为例进行说明。
本案例的尾坐飞机在垂直起降阶段,如未采用本发明专利技术时,遭遇上述突风时。飞机承受的干扰气动力F=6925N,干扰气动力与起飞总重力比值n=0.353。由于左右机翼风扰气动力处于对称,左右机翼风扰气动力扰飞机重心力矩为零,机翼与风向夹角α始终保持45°,如图12所示。
如果采用本专利发明技术,本案例的尾坐飞机在垂直起降阶段,同样遭遇上述突风时,减小突风干扰气动力的步骤如下:
第一步,识别风的前后方向:
由于同时满足如下条件,确认风向为前向。
dP17m18>0;
dP20m21>0;
dP17m18的绝对值:abs(dP17m18)>Pthreshold;
dP20m21的绝对值:abs(dP20m21)>Pthreshold;
第二步,识别风的左右方向
在确认前向风基础上,同时满足如下条件,确认风向为左向。
P24>P26,且P32>P34。
第三步,产生使机翼与风夹角减小的操纵力矩。
采用如图13所示的左侧升降副翼后缘向后偏转45°,右侧升降副翼后缘向前偏转45°。在螺旋桨滑流作用下,左升降副翼产生前的操纵力;右升降副翼产生向后的操纵力;左右升降副翼产生绕机身轴线,使左机翼向前右机翼向后的操纵力矩。
第四步,机翼与风夹角减小
在上述力矩作用下,机翼与突风夹角α从45°逐渐减小,如图14,风扰气动力F从6925N减小至2985N,如图15;相对风扰气动力系数f从0.436减小至0.152,如图16;由于机翼与风夹角减小,dP17m18绝对值和dP20m21绝对值逐渐减小,直到满足如下条件:
dP17m18的绝对值:abs(dP17m18)≤Pthreshold;
且dP20m21的绝对值:abs(dP20m21)≤Pthreshold。
停止产生使机翼与风向夹角减小的偏转力矩,为产生上述偏转力矩而的舵面偏转增量赋值为零。
本发明提供的尾坐飞机垂直起降控制方法,能够降低尾坐飞机垂直起降过程中的突风干扰,具有如下有益效果:
1.减小突风干扰气动力,提高尾坐飞机垂直起降轨迹和姿态控制精度。
垂直起降状态,任意方向水平风扰气动力对于飞控系统是随机的系统外部扰动。风扰气动力越大,垂直起降轨迹和控制精度的降低。相比机翼对称构型的尾坐飞机,本发明采用机翼非对称构型技术,可减小突风干扰气动力,减小起降状态飞控系统外部扰动,提高尾坐飞机垂直起降轨迹和姿态控制精度。
2.减小风扰气动力,减小为抵抗风扰气动力所消耗的发动机额外功率。
垂直起降状态,水平风扰产生的气动力,需要通过偏转舵面或者调整飞机姿态改变发动机推/拉力方向,产生大小相等方向相反的力与之平衡。风扰气动力越大,为平衡风扰气动力所损失的拉力越多,消耗的发动机功率越大。相比机翼对称构型的尾坐飞机,本发明采用机翼非对称构型技术,减小为抵抗风扰气动力所消耗的发动机功率。
至此,已经结合附图所示的优选实施方式描述了本申请的技术方案,领域内技术人员应该理解的是,本申请的保护范围显然不局限于这些具体实施方式,在不偏离本申请的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本申请的保护范围之内。
- 一种尾坐飞机垂直起降控制方法
- 一种高效尾坐式垂直起降固定翼飞行器及其控制方法