一种电池铲运机电控系统及电池铲运机
文献发布时间:2023-06-19 10:41:48
技术领域
本发明属于铲运机技术领域,具体涉及一种电池铲运机电控系统及电池铲运机。
背景技术
地下铲运机广泛用于矿山作业,工作于井下矿山环境中,装载和铲运矿石。为传统柴油发动机驱动和通过拖拽电缆连接到巷道工频电网驱动方式。传统燃油发动机在工作时产生大量的废气和噪音,需要大量的通风设备改善巷道环境,增加运行成本,由拖拽电缆供电驱动的铲运车,需要稳定的电网环境避免电网波动,拖拽电缆会被碎石割破及落石砸中,不定期的更换电缆成本相对高。为了解决上述的问题,国内外越来越多的采矿企业提出利用新能锂电池作为驱动源,不仅能够大幅减少尾气排放和降低噪音,从而改善巷道环境,而且还避免了不定期更换电缆,造成成本过高的问题。然而,对于电池铲运机,电控系统的好坏决定了电池铲运机的整车性能,因此,必须设计合理的电控系统,才能使得铲运机具有更好的操控性能。
目前,现有的铲运机电控系统,主要适用于燃油驱动的铲运机,并且针对电池铲运机的相关技术研究叶主要是针对电池铲运机的整车设计,而对其电控系统的研究设计还相对较少。例如申请号为201621289241.3的中国专利公开了一种电池铲运机,申请号为201811496933.9的中国专利公开了一种电动铲运机,但这些公开的技术中,主要关注于电池铲运机的整体架构,而对于电池铲运机的电控系统还有很多不足,因此迫切需要一种合理的电控系统,来实现电池铲运机的整车控制,使得电池铲运机具有更好的控制性能。
发明内容
技术问题:针对现有的铲运机电控系统难以用于电池铲运机的整车控制问题,本发明提供一种电池铲运机电控系统,利用该电控系统,可以对电池铲运机进行更好的进行整车控制;并且,提供了一种电池铲运机,该电池铲运机利用所提出的电控系统,具有更好的整车控制性能。
技术方案:本发明电池铲运机电控系统,包括供电系统、牵引系统、辅助工作系统、整车控制器、整车显示器、照明系统;
所述供电系统包括电池包和DC/DC转换器,所述DC/DC转换器的输入端与电池包连接,用于将电池包输出的高压电转换为低压电;
所述牵引系统包括行走逆变器、行走电机、变速箱,所述行走逆变器与电池包连接,行走电机与行走逆变器电连接,行走电机的输出端与变速箱的输入端连接,行走逆变器能够将直流电转换为交流电并对行走电机进行转速控制;
所述辅助工作系统包括辅助逆变器、辅助电机、举升倾倒液压系统、液压冷却系统,辅助逆变器与电池包连接,辅助电机与辅助逆变器连接,辅助逆变器能够将直流电转换为交流电并对辅助电机进行转速控制,辅助电机用于驱动倾倒液压系统和液压冷却系统的液压泵工作;
所述整车控制器分别与DC/DC转换器、行车逆变器、辅助逆变器、液压冷却系统连接;
所述整车显示器分别与DC/DC转换器、整车控制器连接;
所述照明系统分别与DC/DC转换器、整车控制器连接。
进一步地,所述变速箱中设置有变速箱控制器,变速箱控制器分别与DC/DC转换器、整车控制器、整车显示器连接,变速箱控制器与整车控制器通过SAE J1929协议进行通讯。
进一步地,所述行走逆变器包括行走逆变器控制模块,行走逆变器控制模块分别与DC/DC转换器、整车控制器连接;
所述辅助逆变器包括辅助逆变器控制模块,辅助逆变器控制模块分别与DC/DC转换器和整车控制器连接。
进一步地,所述行走逆变器控制模块和辅助逆变器控制模块与整车控制器均通过CAN-Open协议进行通讯连接。
进一步地,所述行走电机中设置有行走电机温度传感器,行走电机温度传感器与整车控制器连接,用于对行走电机的工作温度进行监控,行走电机温度传感器与整车控制器通过SAEJ1939协议进行通讯;
行走电机温度传感器检测到行走电机的线圈温度超过第一设定温度,进行报警,当超过第二设定温度,报警同时,整车控制器向行走逆变器控制模块发出停机指令,控制行走电机停止。
进一步地,所述辅助电机中设置有辅助电机温度传感器,所述辅助电机温度传感器与整车控制器连接,用于对辅助电机的工作温度进行监控,辅助电机温度传感器与整车控制器通过SAEJ1939协议进行通讯;
辅助电机温度传感器检测到辅助电机的线圈温度达到第一设定温度,进行报警,当超过第二设定温度,报警同时,整车控制器向辅助逆变器控制模块发出停机指令,控制辅助电机停止。
进一步地,所述行走电机上设置有第一旋转编码器,所述第一旋转编码器与行走逆变器控制模块连接,用于实现行走逆变器对行走电机的闭环控制;
所述辅助电机上设置有第二旋转编码器,所述第二旋转编码器与辅助逆变器控制模块连接,用于实现辅助逆变器对辅助电机的闭环控制。
进一步地,行走逆变器对行走电机闭环控制前,断开行走电机负载,将行走电机的参数输入到行走逆变器控制模块中自整定运行,实现行走电机与行走逆变器的匹配,行走逆变器能够根据行走电机的运行状态,选择最佳的优化参数保存,并能利用最佳参数对行走电机进行平稳控制;
辅助逆变器对辅助电机闭环控制前,断开辅助电机负载,将辅助电机的参数输入到行走逆变器控制模块中自整定运行,实现辅助电机与辅助逆变器的匹配,辅助逆变器能够根据辅助电机的运行状态,选择最佳的优化参数保存,并能利用最佳参数对辅助电机进行平稳控制。
进一步地,辅助电机的转速根据举升倾倒液压系统进行优化控制,当举升倾倒液压系统在铲运机工作过程中未执行铲举动作的时长超过设定时长时,辅助电机降到设定速度并保持。
进一步地,所述液压冷却系统包括若干个风扇,所述风扇分别与DC/DC转换器连接和整车控制器连接。
进一步地,所述电池包通过高压分线盒进行电流分流,所述高压分线盒中设置有第一熔断器,用于短路保护。
进一步地,所述DC/DC转换器通过低压分线盒进行电流分流,所述低压接线盒中设置有第二熔断器,用于短路保护。
进一步地,所述电池包中设置有BMS系统,BMS系统分别与整车显示器、整车控制器连接,用于监控电池包的工作状态,所述BMS系统与整车显示器、整车控制器均通过SAEJ1939协议进行通讯。
进一步地,所述电池包中设置有保护装置,用于对电池包进行保护。
进一步地,所述供电系统还包括蓄电池,所述蓄电池与DC/DC转换器连接。
本发明电池铲运机,包括所述的电池铲运机电控系统。
有益效果:本发明与现有技术相比,具有以下优点:
本发明的电池铲运机电控系统包括供电系统、牵引系统、辅助工作系统、整车控制器、整车显示器、照明系统,供电系统利用高压分线盒对电池包输出的高压电进行分流,为牵引系统、辅助工作系统提供高压电流的,并且利用DC/DC转换器将高压电转换为低压电,从而能够可靠地为电控系统中多个部件提供电力,实现电力的有效配置,保证供电系统安全稳定。
利用逆变器将高压直流电转换为交流电,满足电机对电力的需求,并且进行逆变器与电机的匹配,实现对电机运行状态的优化,从而提高了电机运行的平稳性,使得电池铲运机在运行过程中更加平稳。并且逆变器对电机采用闭环控制,能够精准监控电机工作状态。此外,利用温度传感器监测电机温度,从而避免电机运行时会遇到过载、堵转和缺相故障造成电机绕组过热损坏。
辅助工作系统中,利用辅助电机实现多个液压系统的驱动,能够减少整车的体积和重量,提高整车的性能。冷却液压系统与整车控制器连接,能够对压力、温度、流量进行实时监控,从而利用这些数据来控制辅助电机转速,从而有效地实现能量的有效利用,在能进行有效冷却的同时,降低能量损失,从而提高能量利用率,使得电池铲运机能够更长时间的工作。
整车控制器与DC/DC转换器、行车逆变器、辅助逆变器、液压冷却系统连接等连接通讯,从而你能够进行有效控制,在本发明的实施例中,真车控制器与行车逆变器、辅助逆变器采用CAN-Open协议进行通讯,与其他部件采用SAE J1939协议进行通讯,保证了数据传输和通讯质量,从而更能有效地对各部件进行控制。
利用整车显示器,实时显示铲运机各项数据,从而使得操作人员能够及时了解铲运机的各系统或部件的运行状态,从而对电池铲运机进行更好的控制。综合多方面设计,使得该电控系统更适用于电池铲运机,从而使得电池铲运机具有更好的整车控制性能。
附图说明
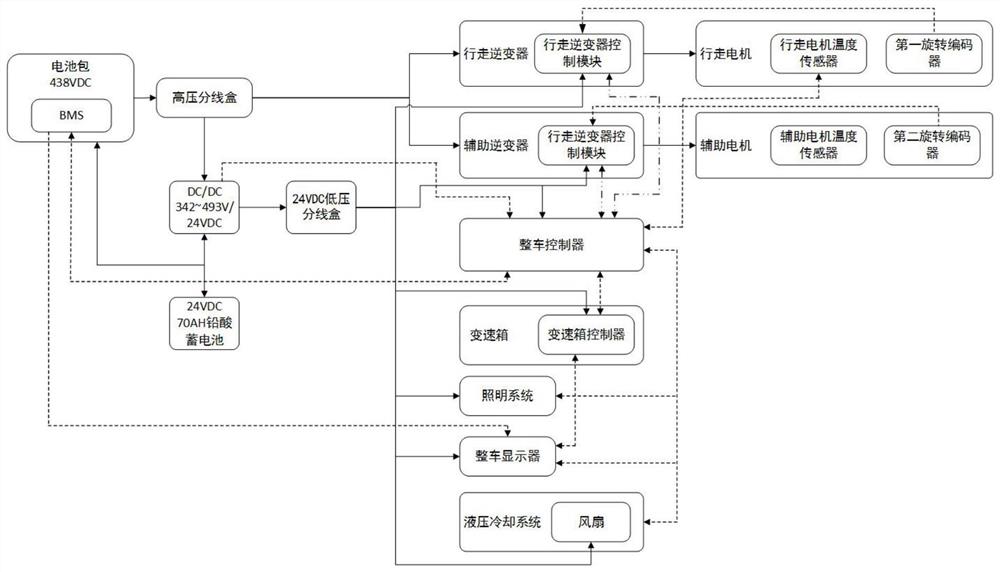
图1为本发明的电池铲运机电控系统的架构图。
具体实施方式
下面结合实施例和说明书附图对本发明作进一步的说明。其中,“第一”、“第二”等只用于描述性表示,并不作为实质性的限制,此外,对“连接”一词做广义解释,包括机械连接、电连接、通讯连接等。
图1为本发明的电控系统的架构图,图中实线表示供电方向,虚线表示利用SAEJ1939协议进行通讯,双点划线表示CAN-Open协议通讯。本发明的电池铲运机电控系统包括供电系统、牵引系统、辅助工作系统、整车控制器、整车显示器、照明系统;下面对各个系统的功能及相互之间的关系进行说明。
供电系统为电池铲运机的各元件提供符合需求的电力,供电系统包括电池包和DC/DC转换器,电池包是电池铲运机的动力来源,在本发明的实施例中,针对一台4吨电池铲运机,选用的是额定电压为438VDC、额定容量为100Kwh的电池包,能够满足铲运机正常工作一个班次3-4小时的电力需求。并且在本发明的实施例中,为了确保电池包能够在恶劣的环境下工作并能减少着火的危险,在电池包内设置有保护装置,保护装置包括绝缘检测、短路保护和灭火系统等,并且各种保护装置均可以采用现有的相应保护装置。同时为了满足电池包的防护等级,在本发明的实施中,选择的电池包具有IP65等级,震动要求满足3g。
DC/DC转换器通过高压分线盒与电池包连接,作用是将电池包输出的电压转换成电池铲运机的各系统所需电压。在本发明的实施例中,针对一台4吨电池铲运机,DC/DC转换器采用的是3KW的DC/DC转换器,能够将电池包的输出的高压电转换为24V的低压直流电输出。
高压分线盒能够实现电流的分流,考虑到整车结构空间有限、车辆行驶中的冲击和震动、工作环境中存在粉尘颗粒和凝露水,在本发明的实施例中,选用外观尺寸紧凑280x230x110mm铸铝材质防护等级达到IP67的高压接线盒,内部安装有第一熔断器,由于电池包存在正负极,所以安装两个第一熔断器,分别与电池包的正负极相连,在本发明的一个实施例中,第一熔断器采用的是额定电流400A的快速熔断器,用于对高压直流回路的短路保护。
牵引系统用于驱动电池铲运机行走,在本发明的实施例中,牵引系统包括行走逆变器、行走电机、变速箱,行走电机牵引铲运机行走,在本发明的一个实施例中,针对4吨电池铲运机,选用了一台70KW的电机作为行走电机。行走逆变器通过高压分线盒与电池包连接,行走电机在运转时,需要高压交流电提供动力,因此利用行走逆变器将电池包输出的高压直流电转换为高压交流电,为行走电机运转提供动力,同时通过辅助逆变器控制辅助电机转速,在本发明的一个实施例中,选用了一个156KW的行走逆变器。
行走逆变器中包括行走逆变器控制模块,用于控制行走逆变器工作,行走逆变器控制模块工作时,需要24V低压直流电提供电力,因此,行走逆变器控制模块与DC/DC转换器通过低压分线盒连接,电压分线盒的作用是将DC/DC转换器输出的低压直流电进行分流,从而能够为多个部件供电。低压分线盒选用外观尺寸紧凑280x230x110mm铸铝材质防护等级达到IP67的低压接线盒,内部安装两个第二熔断器,并分别连接到电池包的正极和负极,用于对低压直流回路的短路保护。
变速箱的输入端与行走电机的输出端连接,从而能够对行走电机的输出进行调速,满足电池铲运机在行走过程中不同的行走动作需要。为了能够进行更好的调速,本发明的实施例中采用的是带变速箱控制器的自动变速箱,变速箱控制器在工作时采用的是24V直流电,因此变速控制器通过低压分线盒与DC/DC转换器连接。辅助工作系统辅助逆变器、辅助电机、举升倾倒液压系统、液压冷却系统,辅助工作系统主要是通过各种液压系统完成各种动作,辅助电机能够驱动各个液压系统的液压泵工作,从而驱动液压系统工作,在本发明的一个实施例中,针对4吨电池铲运机,选用了一台70KW的电机作为行走电机。辅助电机需要高压交流电提供动力,因此将辅助电机与辅助逆变器连接,辅助逆变器通过高压分线盒与电池包连接,辅助逆变器将电池包输出的高压直流电转换为高压交流电,为辅助电机运行提供电力,同时利用辅助逆变器控制控制辅助电机的转速,在本发明的一个实施例中,选了一个90KW的辅助逆变器。辅助逆变器包括辅助逆变器控制模块,从而控制辅助逆变器工作,辅助逆变器控制模块需要24V低压直流电,因此通过低压分线盒将辅助逆变器控制模块与DC/DC转换器连接。
举升倾倒液压系统主要是驱动铲运机进行铲举、倾倒等动作,利用辅助电机驱动举升倾倒液压系统的液压泵进行工作。液压冷却系统的作用是使得铲运机上的主要零部件进行冷却,通过液压油的流动带走热量,液压冷却系统的液压泵也同样通过辅助电机驱动。液压冷却系统还包括若干个风扇,风扇采用的是24V低压直流供电,所以风扇通过低压分线盒与DC/DC转换器连接。
通常辅助电机在接到启动命令后,会一直高速运转,在本发明的实施例中,辅助电机会保持1500rpm高速运转,但是如果铲运机没有进行铲举动作,会造成大量的电量浪费,从而降低了电池包的工作时间,为了避免电能浪费,本发明的实施例中,辅助电机的转速根据举升倾倒液压系统进行优化控制,当举升倾倒液压系统在铲运机工作过程中未执行铲举运动时长超过设定时长时,辅助电机降到设定速度并维持。例如在本发明的实施例中,当未执行产举动作超过1.5min,则将辅助电机的转速降到800rpm并保持,从而达到节能的目的。
整车控制器,整车控制器是整车通讯网络的核心,能够将所有具有通讯功能的部件整合在一起进行数据交换,从而实现整车的可靠控制。在本发明的一个实施例中,针对4吨电池铲运机,选用了48路I/O针脚IP67防护等级,工作温度在-40℃~+105℃范围的整车控制器,从而满足铲运机在恶劣环境下的工作需求。
整车控制器通过低压分线盒与DC/DC转换器连接,通过DC/DC转换器转换输出的24V低压直流电提供电力,同时与DC/DC转换器进行通讯,可以实时的获取DC/DC转换器的工作状态,在本发明的实时例中,整车控制器与DC/DC转换器采用SAE J1939协议进行通讯,保证了通讯质量。整车控制器行车逆变器和辅助逆变器连接,从而能够向行车逆变器以及辅助逆变器发送控制指令,从而控制行走电机和辅助电机的运行。具体的,整车控制器连接在行车逆变器的行车逆变器控制模块和辅助逆变器的辅助逆变器控制模块上,在本发明的实时例中,整车控制器与行车逆变器控制模块和辅助逆变器的辅助逆变器控制模块采用CAN-Open协议进行通讯,从而保证通讯质量。
为了对变速箱进行控制,整车控制器与变速箱控制器连接,使得变速箱与整车控制器之间建立通讯,从而能够向变速箱发送控制指令,并实时监测变速箱的状态,为了进行更好的通讯,本发明的实施例中,变速箱控制器与整车控制器之间采用SAE J1939协议进行通讯。建立通讯后,可将油门位置、行走电机转速、变速箱输出速度、变速箱需要的行走电机转速、以及变速箱故障发送给整车控制器,从而利用这些信息进行更可靠的控制。
此外考虑到能量的利用效率增加车辆正常的工作时间,需要对液压冷却系统进行监控,监控液压冷却系统的实时压力、温度、流量等,因此将液压冷却系统与整车控制器连接,具体的,可以在液压冷却系统设置有若干的监测传感器,监测传感器可以将液压冷却系统的状态发给整车控制器,利用这些数据来控制辅助电机转速,从而有效地实现能量的有效利用,在能进行有效冷却的同时,降低能量损失,从而提高能量利用率。并且液压冷却系统中的风扇与整车控制器连接,便于进行控制。具体地,在本发明的实施例中,液压冷却系统与整车控制器之间也采用SAE J1939协议进行通讯。
为了能够更精准地控制行走电机和辅助电机的工作状态,行走逆变器控制行走电机运行时,采用闭环控制方式,具体地,行走电机中设置有第一旋转编码器,第一旋转编码器与行走逆变器控制模块连接,从而能够实时监控行走电机的转速,一般现有的电机中都具有编码器,直接进行相应连接即可。因行走逆变器控制模块与整车控制器是连接可以通讯的,行走电机的转速信息能够直接被发送到整车控制器。
为了能够更好地实现行走电机的平稳控制,在对行走电机行走控制前,将行走电机的负载断开,将行走电机的参数如额定电压、电流、功率、最大转速信息,输入到行走逆变器控制模块中,进行自整定运行,实现行走电机与行走逆变器的匹配,行走逆变器能够根据行走电机的运行状态,选择最佳的优化参数保存,并利用最佳参数对行走电机进行平稳控制。
同样原因,辅助逆变器控制辅助电机运行时,采用闭环控制方式,具体地,辅助电机中设置有第二旋转编码器,第二旋转编码器与辅助逆变器控制模块连接,从而能够实时监控行走电机的转速,并且由于辅助逆变器控制模块与整车控制器是连接通讯的,辅助电机的转速信息能够直接被发送到整车控制器。并且采用与对行走逆变器自整定相同的方法,实现辅助逆变器与辅助电机的匹配,实现对辅助电机的平稳控制。
进一步地,在电机运行时会遇到过载、堵转和缺相故障造成电机绕组过热损坏,因此在本发明的实施例中,在行走电机中设置有行走电机温度传感器,用于对行走电机的工作温度进行监控。行走电机温度传感器与整车控制器连接,使得行走电机温度传感器能与整车控制器进行通讯,在本发明的实施例中,行走电机温度传感器能与整车控制器可以采用SAE J1939协议进行通讯。行走电机温度传感器检测到行走电机的线圈温度超过第一设定温度,进行报警,当温度继续升高,超过第二设定温度,进行报警同时,整车控制器并向行走逆变器控制模块发出停机指令,控制行走电机停止。
同样的原因,在辅助电机中设置有辅助电机温度传感器,用于对辅助电机的工作温度进行监控,辅助电机温度传感器和整车控制器连接,使得辅助电机温度传感器能与整车控制器进行通讯,在本发明的实施例中,辅助电机温度传感器能与整车控制器同样可以采用SAE J1939协议进行通讯。辅助电机温度传感器检测到辅助电机的线圈温度超过第一设定温度,进行报警,当温度继续升高,超过第二设定温度,报警同时,整车控制器向辅助逆变器控制模块发出停机指令,控制辅助电机停止。
具体的,在本发明的实施例中,第一设定温度为150℃,第二设定温度为170℃,并且,行走电机温度传感器和辅助电机温度传感器采用的是KTY84电阻型温度传感器。
整车显示器能够将整车的重要参数进行可视化,在本发明的实施例中,采用的是主流的7寸按键显示屏,通过不同页面的切换,显示所需要了解的参数,同时在组态时设置相关的权限分配,拥有不同操作权限的用户只能访问相应权限的界面。对可预见的故障信息进行预设置,当故障发生是进行实时归档储存。
整车显示器需要24V低压直流电进行供电,因此通过低压分线盒与DC/DC转换器连接,并且整车显示器与整车控制器连接,使显示屏能与整车控制器进行通讯,从而能够将通过整车控制器交换的数据进行显示。根据上述对本发明的实施方式的说明,在本发明的实施例中,显示器可以行走电机的内部温度数据、辅助电机的内部温度数据、行车电机的转速、辅助电机的转速、变速箱状态数据、DC/DC转换器的状态数据、液压冷却系统状态数据等。
照明系统是为铲运机在工作过程中提供照明,因为铲运机多工作于矿井下,所以好的照明系统非常重要,在本发明的实施例中,照明系统采用24V低压直流供电,因此照明系统通过低压分线盒与DC/DC转换器连接。同时为了对照明系统进行控制,照明系统与整车控制器连接。
进一步地,为了对电池包的状态进行更好的检测,电池包中设置有BMS系统(电池管理系统),BMS系统分别与整车显示器和整车控制器连接,使BMS系统能与整车显示器及整车显示器进行通讯,从而实时监控电池包的工作状态,BMS系统能将电池包电量、输出电压、电池包温度、故障信息等数据采集后通过整车显示器显示出来,并及时提醒操作人员对电池包进行充电保证车辆正常工作。在本发明的实施例中,BMS系统与整车显示器和整车控制器之间采用SAE J1939协议进行通讯,从而保证通讯质量。
进一步地,为了在电池包断电时,铲运机中各主要部件能够继续工作,供电系统还包括蓄电池,蓄电池与DC/DC转换器连接,在本发明的实施例中,蓄电池采用的是24VDC70AH铅酸蓄电池,在需要蓄电池供电时,输出24V电压直流电,在不需要供电时,DC/DC转换器输出的电流能够为其充电。
利用上述的电控系统,使得电池铲运机具有更好的整车控制性能。进一步地,本发明提供了一种电池铲运机,该电池铲运机利用所提出的电控系统进行电气控制,从而使得电池铲运机具有更好的控制性能,能够在恶劣的工作环境中可靠工作。
上述实施例仅是本发明的优选实施方式,应当指出:对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和等同替换,这些对本发明权利要求进行改进和等同替换后的技术方案,均落入本发明的保护范围。
- 一种电池铲运机电控系统及电池铲运机
- 电池铲运机紧急停车控制系统、控制方法及电池铲运机