卫星太阳翼定位工装
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及卫星安装技术领域,尤其涉及一种卫星太阳翼定位工装。
背景技术
太阳翼是卫星的能量来源,卫星发射时太阳翼处于折叠状态,星箭分离后打开并在卫星飞行过程中不断调整方向,使太阳电池对准太阳,为整星工作提供能量。太阳能帆板有供电和充电两大功能,相当于一个小型发电站,太阳能帆板与太阳帆并不是同一种事物,太阳能帆板是一种收集太阳能的装置,而太阳帆是利用太阳光的光压进行宇宙航行的一种航天器。
现有公开号为CN105834987B的一种卫星太阳翼定位工装,本发明涉及一种卫星太阳翼定位工装,包括转运车,所述转运车具有载物平台,所述载物平台上具有平移机构;所述平移机构包括第一法兰盘、井字梁、第二法兰盘、固定安装在所述第一法兰盘上的第一滚珠丝杆和固定安装在所述第二法兰盘上的第二滚珠丝杆;转动第一滚珠丝杆时,能使所述井字梁在第一法兰盘上沿第一滚珠丝杆方向滑动;转动第二滚珠丝杆时,能使所述第二法兰盘在所述井字梁上沿第二滚珠丝杆方向滑动。
上述发明,在对太阳翼进行定位过程中,太阳翼始终处于水平放置,在卫星和太阳翼之间存在角度偏差时,无法进行微调,定位不准确,同时采用滚珠进行移动,精确率低。
发明内容
本发明实施例提供一种卫星太阳翼定位工装,以解决上述技术问题。
本发明实施例采用下述技术方案:一种卫星太阳翼定位工装,包括载物平台、平面移动机构、旋转机构、升降调节机构、支撑机构和抓取机构,所述载物平台可固定安装在转运车厢上,所述平面移动机构固定安装在载物平台上,所述旋转机构安装在平面移动机构上,所述升降调节机构安装在旋转机构上,所述支撑机构安装在旋转机构上,所述抓取机构安装在升降调节机构上。
进一步,所述平面移动机构包括第一丝杆滑台、第二丝杆滑台、移动轨道、移动伸缩杆、移动滑块和下承载板,所述第一丝杆滑台固定安装在载物平台上,所述第二丝杆滑台固定安装在载物平台上且与第一丝杆滑台安装方向呈垂直夹角,所述移动轨道的一端安装在第一丝杆滑台的滑台上,所述移动轨道上设有移动滑槽,所述移动滑块滑动设置在移动轨道的移动滑槽内,所述下承载板焊接在移动滑块的底部且下承载板与移动轨道滑动配合,所述移动伸缩杆的一端安装在第二丝杆滑台的滑台上且另一端安装在下承载板上。
进一步,所述旋转机构包括上承载板、旋转轴承、旋转盘、旋转齿圈、支撑架、旋转齿轮、承载架和旋转电机,所述上承载板焊接在移动滑块的顶部且上承载板与移动轨道滑动配合,所述旋转轴承安装在上承载板的顶部,所述旋转盘套设在旋转轴承的外圈上且旋转盘与上承载板转动配合,所述旋转齿圈固定套设在旋转盘的外圈上,所述支撑架焊接在上承载板的侧壁上,所述承载架焊接在支撑架上,所述旋转电机安装在承载架上,所述旋转电机的主轴贯穿支撑架设置,所述旋转齿轮转动安装在支撑架上且连接在旋转电机的主轴上,所述旋转齿轮与旋转齿圈相啮合。
进一步,所述升降调节机构包括支撑板、调节板和三个升降调节组件,所述支撑板焊接在旋转盘上时,三个所述升降调节组件均安装在支撑板上,每个所述升降调节组件均包括升降电机、升降安装板、升降螺纹杆、升降滑块、两个升降杆、两个升降支撑杆和四个转动安装销,两个所述升降杆的一端均安装在支撑板上,所述升降安装板安装在升降杆的另一端,所述升降电机安装在升降安装板上且升降电机的主轴贯穿升降安装板设置,所述升降螺纹杆转动安装在升降安装板上且一端连接在升降电机的主轴上,所述升降滑块套设在升降螺纹杆和两个升降杆上,所述升降滑块与两个升降杆滑动配合且升降滑块与升降螺纹杆螺纹配合,其中两个转动安装销对称转动安装在升降滑块上,两个所述升降支撑杆的一端分别转动安装在两个转动安装销上,另外两个所述转动安装销分别转动安装两个升降滑块的另一端,所述调节板安装在六个升降支撑杆上的六个转动安装销上。
进一步,所述支撑机构包括推动电缸和万向节,所述推动电缸安装在上承载板的顶部,所述万向节的一端安装在调节板的底部且万向节的另一端安装在推动电缸的伸缩端。
进一步,所述抓取机构包括抓取架、抓取电缸、抓取移动块、两个抓取滑动板和两个抓取夹,所述抓取架固定安装在调节板的顶部,所述抓取架内设有滑槽,两个所述抓取滑动板对称安装在抓取架的滑槽内,两个所述抓取滑动板与抓取架滑动配合,两个所述抓取夹安装在两个抓取滑动板上,两个所述抓取滑动板上均设有滑轨,所述抓取移动块的两侧安装在两个抓取滑动板的滑轨上,所述抓取电缸安装在调节板的顶部,所述抓取电缸的伸缩端贯穿抓取架并铰接在抓取移动块上。
进一步,所述下承载板的底部设有万向轮。
本发明实施例采用的上述至少一个技术方案能够达到以下有益效果:
其一,平面移动机构是由第一丝杆滑台驱动移动轨道移动,带动移动滑块移动,从而对移动伸缩杆进行拉伸或收缩,控制移动滑块在载物平台上进行横向移动,再由第二丝杆滑台驱动移动伸缩杆移动,移动伸缩杆移动带动移动滑块在移动轨道内的移动滑槽内移动,控制移动滑块在载物平台上进行纵向移动,第一丝杆滑台和第二丝杆滑台相配合控制卫星太阳翼对准卫星,进行定位;在工作开始之前,将载物平台水平放置,当对卫星太阳翼进行定位安装时,第一丝杆滑台和第二丝杆滑台进行运作,带动移动滑块在载物平台上进行移动,使装置带动卫星太阳翼对准卫星安装位置,使其定位准确。
其二,旋转机构是由旋转电机驱动旋转齿圈转动,旋转齿圈转动带动旋转盘转动,旋转盘在旋转轴承的作用下在上承载板上进行转动,旋转齿轮和旋转齿圈采用小圆带动大圈的结构,便于提高装置的旋转精准度,便于卫星太阳翼进行定位,准确安装在卫星上;在平面移动机构调节好水平位置后,旋转电机运作,带动旋转齿轮转动,旋转齿轮转动带动旋转齿圈转动,旋转齿圈转动带动旋转盘转动,从而可以调节卫星太阳翼的朝向,便于对卫星太阳翼进行定位安装。
其三,升降调节机构是由升降电机驱动升降螺纹杆转动,升降螺纹杆转动带动升降滑块在升降螺纹杆和升降杆上进行上下滑动,从而带动调节板的一侧进行升降,可以起到对调节板调节角度和高度的作用,三个升降调节组件同时运作,能够全方位的调节卫星太阳翼的角度和高度,使卫星太阳翼定位准确,同时在升降滑块和调节板之间的升降支撑杆的两端采用转动安装销进行连接,提高调节的精准度;在工作进行时,三个升降电机运作,带动三个升降滑块移动,在支撑机构的配合下,对调节板进行调节角度和高度,有利于带动卫星太阳翼对准卫星安装孔,可以实现将卫星太阳翼进行多方位角度调节,定位精准。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
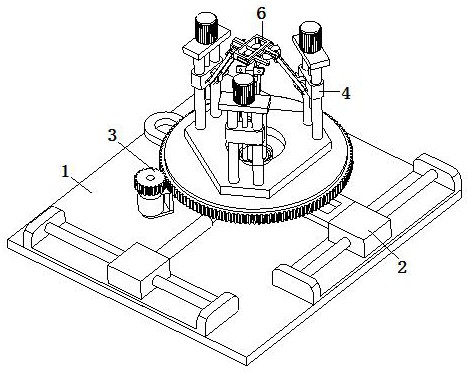
图1为本发明的第一立体结构示意图;
图2为本发明的第二立体结构示意图;
图3为本发明的平面移动机构的立体结构示意图;
图4为本发明的旋转机构的立体结构示意图;
图5为本发明的升降调节机构的立体结构示意图;
图6为本发明的支撑机构的立体结构示意图;
图7为本发明的抓取机构的立体结构示意图;
图8为本发明的局部的立体结构示意图。
附图标记:
载物平台1,平面移动机构2,旋转机构3,升降调节机构4,支撑机构5,抓取机构6,第一丝杆滑台21,第二丝杆滑台22,移动轨道23,移动伸缩杆24,移动滑块25,下承载板26,上承载板31,旋转轴承32,旋转盘33,旋转齿圈34,支撑架35,旋转齿轮36,承载架37,旋转电机38,支撑板41,调节板42,升降调节组件43,升降电机44,升降安装板45,升降螺纹杆46,升降滑块47,升降杆48,升降支撑杆49,转动安装销491,推动电缸51,万向节52,抓取架61,抓取电缸62,抓取移动块63,抓取滑动板64,抓取夹65,万向轮7。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明具体实施例及相应的附图对本发明技术方案进行清楚、完整地描述。显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
以下结合附图,详细说明本发明各实施例提供的技术方案。
参照图1至图8所示,本发明实施例提供一种卫星太阳翼定位工装,包括载物平台1、平面移动机构2、旋转机构3、升降调节机构4、支撑机构5和抓取机构6,所述载物平台1可固定安装在转运车厢上,所述平面移动机构2固定安装在载物平台1上,所述旋转机构3安装在平面移动机构2上,所述升降调节机构4安装在旋转机构3上,所述支撑机构5安装在旋转机构3上,所述抓取机构6安装在升降调节机构4上。
优选的,参照图3所示,所述平面移动机构2包括第一丝杆滑台21、第二丝杆滑台22、移动轨道23、移动伸缩杆24、移动滑块25和下承载板26,所述第一丝杆滑台21固定安装在载物平台1上,所述第二丝杆滑台22固定安装在载物平台1上且与第一丝杆滑台21安装方向呈垂直夹角,所述移动轨道23的一端安装在第一丝杆滑台21的滑台上,所述移动轨道23上设有移动滑槽,所述移动滑块25滑动设置在移动轨道23的移动滑槽内,所述下承载板26焊接在移动滑块25的底部且下承载板26与移动轨道23滑动配合,所述移动伸缩杆24的一端安装在第二丝杆滑台22的滑台上且另一端安装在下承载板26上;平面移动机构2是由第一丝杆滑台21驱动移动轨道23移动,带动移动滑块25移动,从而对移动伸缩杆24进行拉伸或收缩,控制移动滑块25在载物平台1上进行横向移动,再由第二丝杆滑台22驱动移动伸缩杆24移动,移动伸缩杆24移动带动移动滑块25在移动轨道23内的移动滑槽内移动,控制移动滑块25在载物平台1上进行纵向移动,第一丝杆滑台21和第二丝杆滑台22相配合控制卫星太阳翼对准卫星,进行定位;在工作开始之前,将载物平台1水平放置,当对卫星太阳翼进行定位安装时,第一丝杆滑台21和第二丝杆滑台22进行运作,带动移动滑块25在载物平台1上进行移动,使装置带动卫星太阳翼对准卫星安装位置,使其定位准确。
优选的,参照图4所示,所述旋转机构3包括上承载板31、旋转轴承32、旋转盘33、旋转齿圈34、支撑架35、旋转齿轮36、承载架37和旋转电机38,所述上承载板31焊接在移动滑块25的顶部且上承载板31与移动轨道23滑动配合,所述旋转轴承32安装在上承载板31的顶部,所述旋转盘33套设在旋转轴承32的外圈上且旋转盘33与上承载板31转动配合,所述旋转齿圈34固定套设在旋转盘33的外圈上,所述支撑架35焊接在上承载板31的侧壁上,所述承载架37焊接在支撑架35上,所述旋转电机38安装在承载架37上,所述旋转电机38的主轴贯穿支撑架35设置,所述旋转齿轮36转动安装在支撑架35上且连接在旋转电机38的主轴上,所述旋转齿轮36与旋转齿圈34相啮合;旋转机构3是由旋转电机38驱动旋转齿圈34转动,旋转齿圈34转动带动旋转盘33转动,旋转盘33在旋转轴承32的作用下在上承载板31上进行转动,旋转齿轮36和旋转齿圈34采用小圆带动大圈的结构,便于提高装置的旋转精准度,便于卫星太阳翼进行定位,准确安装在卫星上;在平面移动机构2调节好水平位置后,旋转电机38运作,带动旋转齿轮36转动,旋转齿轮36转动带动旋转齿圈34转动,旋转齿圈34转动带动旋转盘33转动,从而可以调节卫星太阳翼的朝向,便于对卫星太阳翼进行定位安装。
优选的,参照图5所示,所述升降调节机构4包括支撑板41、调节板42和三个升降调节组件43,所述支撑板41焊接在旋转盘33上时,三个所述升降调节组件43均安装在支撑板41上,每个所述升降调节组件43均包括升降电机44、升降安装板45、升降螺纹杆46、升降滑块47、两个升降杆48、两个升降支撑杆49和四个转动安装销491,两个所述升降杆48的一端均安装在支撑板41上,所述升降安装板45安装在升降杆48的另一端,所述升降电机44安装在升降安装板45上且升降电机44的主轴贯穿升降安装板45设置,所述升降螺纹杆46转动安装在升降安装板45上且一端连接在升降电机44的主轴上,所述升降滑块47套设在升降螺纹杆46和两个升降杆48上,所述升降滑块47与两个升降杆48滑动配合且升降滑块47与升降螺纹杆46螺纹配合,其中两个转动安装销491对称转动安装在升降滑块47上,两个所述升降支撑杆49的一端分别转动安装在两个转动安装销491上,另外两个所述转动安装销491分别转动安装两个升降滑块47的另一端,所述调节板42安装在六个升降支撑杆49上的六个转动安装销491上;升降调节机构4是由升降电机44驱动升降螺纹杆46转动,升降螺纹杆46转动带动升降滑块47在升降螺纹杆46和升降杆48上进行上下滑动,从而带动调节板42的一侧进行升降,可以起到对调节板42调节角度和高度的作用,三个升降调节组件43同时运作,能够全方位的调节卫星太阳翼的角度和高度,使卫星太阳翼定位准确,同时在升降滑块47和调节板42之间的升降支撑杆49的两端采用转动安装销491进行连接,提高调节的精准度;在工作进行时,三个升降电机44运作,带动三个升降滑块47移动,在支撑机构5的配合下,对调节板42进行调节角度和高度,有利于带动卫星太阳翼对准卫星安装孔,可以实现将卫星太阳翼进行多方位角度调节,定位精准。
优选的,参照图6所示,所述支撑机构5包括推动电缸51和万向节52,所述推动电缸51安装在上承载板31的顶部,所述万向节52的一端安装在调节板42的底部且万向节52的另一端安装在推动电缸51的伸缩端;支撑机构5是由推动电缸51驱动调节板42在三个升降调节组件43之间进行升降,配合升降调节组件43对调节板42进行调节,防止调节板42因重力问题而卡住;在升降调节机构4进行运作时,推动电缸51开始运作,控制调节板42的竖直高度,同时配合万向节52,不阻碍调节板42发生转向。
优选的,参照图7所示,所述抓取机构6包括抓取架61、抓取电缸62、抓取移动块63、两个抓取滑动板64和两个抓取夹65,所述抓取架61固定安装在调节板42的顶部,所述抓取架61内设有滑槽,两个所述抓取滑动板64对称安装在抓取架61的滑槽内,两个所述抓取滑动板64与抓取架61滑动配合,两个所述抓取夹65安装在两个抓取滑动板64上,两个所述抓取滑动板64上均设有滑轨,所述抓取移动块63的两侧安装在两个抓取滑动板64的滑轨上,所述抓取电缸62安装在调节板42的顶部,所述抓取电缸62的伸缩端贯穿抓取架61并铰接在抓取移动块63上;抓取机构6是由抓取电缸62驱动抓取移动块63在两个抓取滑动板64上移动,控制两个抓取滑动板64在抓取架61上移动,从而带动两个抓取夹65对卫星太阳翼进行夹持,方便对卫星太阳翼进行定位安装,同时防止在安装过程中卫星太阳翼产生滑动干扰定位;在工作开始前,抓取电缸62开始运作,驱动两个抓取夹65对卫星太阳翼进行夹持,随后在平面移动机构2和升降调节机构4的带动下,抓取机构6带动卫星太阳翼移动至安装处,进行安装。
优选的,参照图8所示,所述下承载板26的底部设有万向轮7;万向轮7安装在下承载板26的底部,万向轮7直接接触载物平面,为了给下承载板26提供支撑力,防止移动滑块25在装置重力的影响下,卡在移动轨道23上,防止损坏移动轨道23和移动滑块25。
本发明的工作原理:在工作开始前,抓取电缸62开始运作,驱动两个抓取夹65对卫星太阳翼进行夹持,平面移动机构2是由第一丝杆滑台21驱动移动轨道23移动,带动移动滑块25移动,从而对移动伸缩杆24进行拉伸或收缩,控制移动滑块25在载物平台1上进行横向移动,再由第二丝杆滑台22驱动移动伸缩杆24移动,移动伸缩杆24移动带动移动滑块25在移动轨道23内的移动滑槽内移动,控制移动滑块25在载物平台1上进行纵向移动,第一丝杆滑台21和第二丝杆滑台22相配合控制卫星太阳翼对准卫星,进行定位;在工作开始之前,将载物平台1水平放置,当对卫星太阳翼进行定位安装时,第一丝杆滑台21和第二丝杆滑台22进行运作,带动移动滑块25在载物平台1上进行移动,使装置带动卫星太阳翼对准卫星安装位置,使其定位准确,旋转机构3是由旋转电机38驱动旋转齿圈34转动,旋转齿圈34转动带动旋转盘33转动,旋转盘33在旋转轴承32的作用下在上承载板31上进行转动,旋转齿轮36和旋转齿圈34采用小圆带动大圈的结构,便于提高装置的旋转精准度,便于卫星太阳翼进行定位,准确安装在卫星上;在平面移动机构2调节好水平位置后,旋转电机38运作,带动旋转齿轮36转动,旋转齿轮36转动带动旋转齿圈34转动,旋转齿圈34转动带动旋转盘33转动,从而可以调节卫星太阳翼的朝向,便于对卫星太阳翼进行定位安装,升降调节机构4是由升降电机44驱动升降螺纹杆46转动,升降螺纹杆46转动带动升降滑块47在升降螺纹杆46和升降杆48上进行上下滑动,从而带动调节板42的一侧进行升降,可以起到对调节板42调节角度和高度的作用,三个升降调节组件43同时运作,能够全方位的调节卫星太阳翼的角度和高度,使卫星太阳翼定位准确,同时在升降滑块47和调节板42之间的升降支撑杆49的两端采用转动安装销491进行连接,提高调节的精准度;在工作进行时,三个升降电机44运作,带动三个升降滑块47移动,在支撑机构5的配合下,对调节板42进行调节角度和高度,有利于带动卫星太阳翼对准卫星安装孔,可以实现将卫星太阳翼进行多方位角度调节,定位精准,支撑机构5是由推动电缸51驱动调节板42在三个升降调节组件43之间进行升降,配合升降调节组件43对调节板42进行调节,防止调节板42因重力问题而卡住;在升降调节机构4进行运作时,推动电缸51开始运作,控制调节板42的竖直高度,同时配合万向节52,不阻碍调节板42发生转向,抓取机构6是由抓取电缸62驱动抓取移动块63在两个抓取滑动板64上移动,控制两个抓取滑动板64在抓取架61上移动,从而带动两个抓取夹65对卫星太阳翼进行夹持,方便对卫星太阳翼进行定位安装,同时防止在安装过程中卫星太阳翼产生滑动干扰定位,随后在平面移动机构2和升降调节机构4的带动下,抓取机构6带动卫星太阳翼移动至安装处,进行安装。
以上所述仅为本发明的实施例而已,并不用于限制本发明。对于本领域技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
- 卫星太阳翼定位工装
- 一种卫星太阳翼定位工装