一种自重夹持式电动爬树整枝机
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及林业工程装备的技术领域,特别是涉及一种自重夹持式电动爬树整枝机。
背景技术
我国是一个林业生产大国,根据国家林业和草原局最新统计数据来看,截止2019年,我国已经成为世界上种植人工林面积最大的国家,人工林总面积占全世界人工林面积的1/3,而且每年的人工林造林面积还在持续增加。
虽然我国人工林的面积在不断的扩大,但是对于人工林的管理方式较为落后,特别是在剪枝方面,很多地区的的剪枝方式还是以人工修剪为主,大多数是采用手锯、砍刀和其他手持机械工具,这样以人工修剪的方式效率较低,会耗费大量的人力和财力,而且安全性较差。按照国家的林业生产要求,为了提高林业生产质量,促进树木健康生长,保证树木各方面指标达到合理要求,必须对树林进行合理的管理,其中整枝就是重要的一项。机器自动化剪枝可以大大提高修剪的效率,提高修枝的实际高度达到人工修枝裁剪不到的高度,通过整枝可促进林木生长、减少林木节疤、提高树干圆满度、增加木材优材率。自动化剪枝减少了人工受伤几率,提高了剪枝的安全性,但是现在大多数整枝装备体积较大,质量较大,对于密集林地不方便进行剪枝工作,未来发展方向要朝着轻量化整枝机器发展。从实践意义来讲,通过机器剪枝可以使林木更好的生长和成材,所以研究和发展整枝机器是势在必行的。
发明内容
本发明所要解决的技术问题是针对上述现有技术的不足提供一种自重夹持式电动爬树整枝机,本自重夹持式电动爬树整枝机用于桉树、马尾松、侧柏等人工速生丰产林的整枝工作,本整枝机的重心在树外,可以自行固定在树干上,减小能源消耗,能较好的从枝条根部切断树根,避免了修枝不完整的情况,降低工人劳动强度,提高作业安全性,解决我国工业用材林短缺的问题。
为实现上述技术目的,本发明采取的技术方案为:
一种自重夹持式电动爬树整枝机,包括圆环机架、爬树机构、切削机构。
所述圆环机架包括左半圆管、右半圆管、左夹紧装置、右夹紧装置、连接装置、锁紧装置;连接装置的左右两侧分别与左半圆管一端和右半圆管一端连接固定,左夹紧装置固定在左半圆管的中间,右夹紧装置固定在右半圆管的中间,锁紧装置的左右两侧分别与左半圆管另一端和右半圆管另一端连接固定。
所述爬树机构包括上驱动台、下驱动台、左上夹紧臂、右上夹紧臂、左下夹紧臂、右下夹紧臂、左上驱动转向装置、右上驱动转向装置、左下驱动转向装置、右下驱动转向装置,上驱动台左侧和右侧分别与左上夹紧臂首端和右上夹紧臂首端连接固定,下驱动台左测和右侧分别与左下夹紧臂首端和右下夹紧臂首端连接固定,左上夹紧臂末端与左上驱动转向装置右侧铰接,右上夹紧臂末端与右上驱动转向装置左侧铰接,左下夹紧臂末端与左下驱动转向装置右侧铰接,右下夹紧臂末端与右下驱动转向装置左侧铰接。
所述切削机构包括电动滑轨、电动滑轨支撑板、锯片电机支架、锯片电机、锯片;电动滑轨底部与电动滑轨支撑板固定,电动滑轨中滑块顶端与锯片电机支架底部固定,锯片电机出轴测与锯片电机支架左侧固定,锯片电机输出轴与锯片固定。
作为本发明进一步改进的技术方案,所述左夹紧装置和右夹紧装置结构相同,均包括上夹紧块和下夹紧块,上夹紧块下端与下夹紧块上端通过螺栓固定,将半圆管中间夹在上夹紧块与下夹紧块之间。
作为本发明进一步改进的技术方案,所述连接装置包括上转向块、下转向块、上夹紧块、下夹紧块,上转向块下端与下夹紧块上端通过螺栓固定,将右半圆管左侧末端夹在上转向块与下夹紧块之间,下转向块上端与上夹紧块下端通过螺栓固定,将左半圆管左侧末端夹在下转向块与上夹紧块之间。
作为本发明进一步改进的技术方案,所述锁紧装置包括上锁紧块、下锁紧块、上固定块、下固定块,上锁紧块下端与下固定块上端通过螺栓固定,将右半圆管右侧末端夹在上锁紧块与下固定块之间,下锁紧块上端与上固定块下端通过螺栓固定,将右半圆管右侧末端夹在下锁紧块与上固定块之间。
作为本发明进一步改进的技术方案,所述上驱动台和下驱动台结构相同,均包括U型固定板、驱动电机、左凸台齿轮、右凸台齿轮,左凸台齿轮固定在U型固定板的中间左侧,右凸台齿轮固定在U型固定板的中间右侧,驱动电机出轴侧固定在U型固定板顶侧,驱动电机的驱动轴与左凸台齿轮凸台内孔通过顶丝固定。
作为本发明进一步改进的技术方案,所述U型固定板包括功能板、直角连接板,功能板右侧与直角连接板左侧通过螺栓连接固定。
作为本发明进一步改进的技术方案,所述左上夹紧臂、右上夹紧臂、左下夹紧臂、右下夹紧臂结构相同,均包括转向连杆、舵机连杆、被动转向连杆、固定连杆,转向连杆首端与相同侧凸台齿轮上端焊接,转向连杆末端与舵机连杆首端通过螺栓固定,被动转向连杆首端与功能板上端铰接,被动转向连杆末端与固定连杆首端通过螺栓固定。
作为本发明进一步改进的技术方案,所述左上驱动转向装置、右上驱动转向装置、左下驱动转向装置、右下驱动转向装置结构相同,均包括装置支撑板、舵机固定板、电机固定板、电机连接板、舵机、减速电机、轮胎,装置支撑板上侧与舵机固定板下侧通过螺栓连接固定,舵机两侧通过螺栓固定在舵机固定板上,舵机驱动轴与电机固定板底端连接固定,电机连接板左侧与电机固定板通过螺栓连接固定,电机固定板的外侧与减速电机驱动轴一侧通过螺栓固定,减速电机的驱动轴与轮胎固定。
本发明的有益效果为:(1)本发明机器人整机机身采用轻量化设计,携带方便,自带驱动电源,能源绿色环保;(2)本发明使用机器人重心在修剪树干外侧,机器人利用自身重量可以在树上固定而不消耗能量;(3)本发明的爬树机构使用橡胶轮胎,且机器自身重量小,所需要的夹持力就小,能极大地减小机器对树皮的损伤;(4)本发明机器人舵机提供转向作用,可以实现在树干上直线和螺旋上升,保证剪枝更彻底;(5)本发明的自动化程度高,提高了林业生产的工作效率、降低了工人的劳动强度,提高了林业作业的安全性。
附图说明
图1为本发明中一种自重夹持式电动爬树整枝机的整体结构示意图;
图2为本发明中一种自重夹持式电动爬树整枝机的整体右视示意图;
图3为本发明中一种自重夹持式电动爬树整枝机的整体俯视示意图;
图4为本发明中一种自重夹持式电动爬树整枝机圆环机架的结构示意图;
图5为本发明中一种自重夹持式电动爬树整枝机爬树机构的俯视结构示意图;
图6为本发明中一种自重夹持式电动爬树整枝机爬树机构的结构示意图;
图7为本发明中一种自重夹持式电动爬树整枝机切削机构的结构示意图;
图8为本发明中一种自重夹持式电动爬树整枝机圆环机架中多种装置的结构图;
图9为本发明中一种自重夹持式电动爬树整枝机驱动台的结构示意图;
图10为本发明中一种自重夹持式电动爬树整枝机U型固定板的结构示意图;
图11为本发明中一种自重夹持式电动爬树整枝机夹紧臂的结构示意图;
图12为本发明中一种自重夹持式电动爬树整枝机驱动转向装置的结构示意图;
具体实施方式
下面结合附图对本发明的较佳实施例进行详细阐述,以使本发明的优点和特征能更易于被本领域技术人员理解,从而对本发明的保护范围做出更为清楚明确的界定。
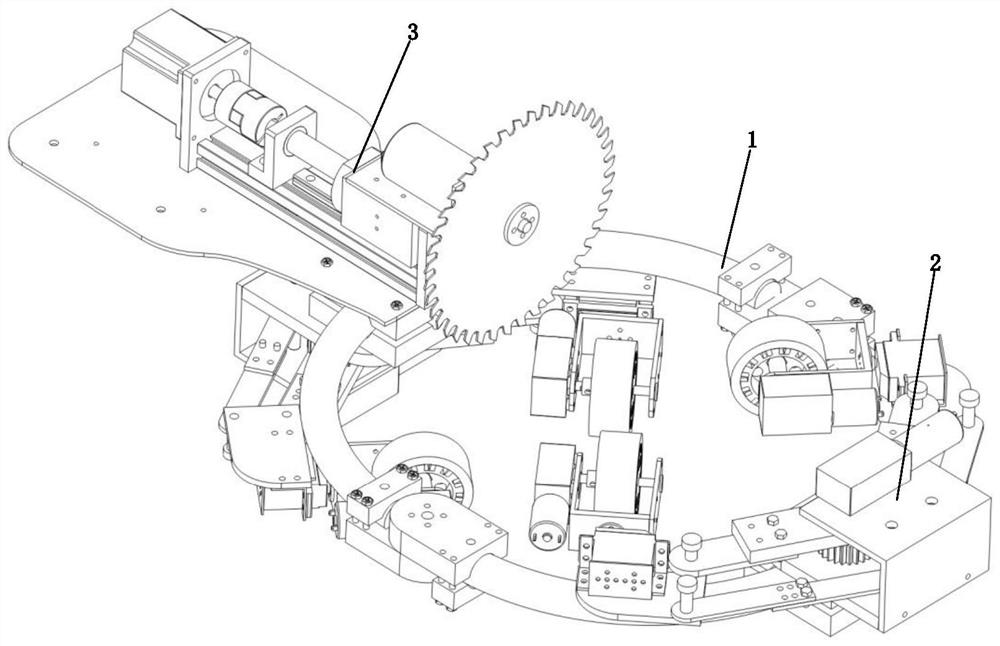
请参阅图1、图2和图3,一种自重夹持式电动爬树整枝机,包括圆环机架1、爬树机构2、切削机构3。
如图4所示,本实施例的圆环机架1包括左半圆管4、右半圆管5、左夹紧装置6、右夹紧装置7、连接装置8、锁紧装置9;连接装置8的左右两侧分别与左半圆管4一端和右半圆管5一端连接固定,连接固定之后左半圆管4和右半圆管5可以根据连接装置8为轴心弧状打开,左夹紧装置6固定在左半圆管4的中间,右夹紧装置7固定在右半圆管5的中间,锁紧装置9的左右两侧分别与左半圆管4另一端和右半圆管5另一端连接固定,通过锁紧装置9可以使左半圆管4和右半圆管5固定锁紧。
如图5和图6所示,本实施例的爬树机构2包括上驱动台10、下驱动台15、左上夹紧臂11、右上夹紧臂12、左下夹紧臂16、右下夹紧臂17、左上驱动转向装置13、右上驱动转向装置14、左下驱动转向装置18、右下驱动转向装置19;上驱动台10左侧和右侧分别与左上夹紧臂11首端和右上夹紧臂12首端连接固定,下驱动台15左测和右侧分别与左下夹紧臂16首端和右下夹紧臂17首端连接固定,通过连接固定使下驱动台15可以分别转动左下夹紧臂16和右下夹紧臂17,左上夹紧臂11末端与左上驱动转向装置13右侧铰接,右上夹紧臂12末端与右上驱动转向装置14左侧铰接,左下夹紧臂16末端与左下驱动转向装置18右侧铰接,右下夹紧臂17末端与右下驱动转向装置19左侧铰接,通过铰接可以更好的控制与树干之间的角度。
如图7所示,本实施例的切削机构3包括电动滑轨20、电动滑轨支撑板21、锯片电机支架22、锯片电机23、锯片24;电动滑轨20底部与电动滑轨支撑板21固定,电动滑轨20中滑块顶端与锯片电机支架22底部固定,锯片电机23出轴测与锯片电机支架22左侧固定,锯片电机23输出轴与锯片24固定,电动滑轨20和锯片电机23运行使锯片24贴近树干并高速转动。
如图8所示,左夹紧装置6和左夹紧装置7的结构相同均包括上夹紧块25和下夹紧块26;上夹紧块25下端与下夹紧块26上端通过螺栓固定,将半圆管中间夹在上夹紧块25与下夹紧块26之间。
如图8所示,连接装置8包括上转向块27、下转向块28、上夹紧块29、下夹紧块30;上转向块27下端与下夹紧块30上端通过螺栓固定,将右半圆管5左侧末端夹在上转向块27与下夹紧块30之间,下转向块28上端与上夹紧块29下端通过螺栓固定,将左半圆管6左侧末端夹在下转向块28与上夹紧块27之间,通过连接装置8使右半圆管5和左半圆管6可以连接装置8为轴心而转动。
如图8所示,锁紧装置9包括上锁紧块34、下锁紧块33、上固定块34、下固定块31;上锁紧块32下端与下固定块31上端通过螺栓固定,将右半圆管5右侧末端夹在上锁紧块32与下固定块31之间,下锁紧块33上端与上固定块34下端通过螺栓固定,将右半圆管5右侧末端夹在下锁紧块33与上固定块之间。
如图9所示,上驱动台10和下驱动台15结构相同包括U型固定板35、驱动电机37、左凸台齿轮38、右凸台齿轮36;左凸台齿轮38固定在U型固定板35的中间左侧,右凸台齿轮36固定在U型固定板35的中间右侧,驱动电机37出轴侧固定在U型固定板35顶侧,驱动电机37的驱动轴与左凸台齿轮38的凸台内孔通过顶丝固定,驱动电机37转动使得左凸台齿轮38转动从而带动左上夹紧臂11夹紧树干。
如图10所示,U型固定板35包括功能板39、直角连接板40;功能板39右侧与直角连接板40左侧通过螺栓连接固定。
如图11所示,左上夹紧臂11、右上夹紧臂12、左下夹紧臂16、右下夹紧臂17结构相同均包括转向连杆41、舵机连杆42、被动转向连杆43、固定连杆44;转向连杆41首端与相同侧凸台齿轮上端焊接,转向连杆41末端与舵机连杆42首端通过螺栓固定,被动转向连杆43首端与功能板39上端铰接,被动转向连杆43末端与固定连杆44首端通过螺栓固定。
如图12所示,左上驱动转向装置13、右上驱动转向装置14、左下驱动转向装置18、右下驱动转向装置19结构相同均包括装置支撑板45、舵机固定板46、电机固定板47、电机连接板48、舵机49、减速电机50、轮胎51;装置支撑板45上侧与舵机固定板46下侧通过螺栓连接固定,舵机49两侧通过螺栓固定在舵机固定板46上,舵机49驱动轴与电机固定板47底端连接固定,电机连接板48左侧与电机固定板47通过螺栓连接固定,电机固定板47的左侧与减速电机50驱动轴一侧通过螺栓固定,减速电机50的驱动轴与轮胎51固定。
本实施例的工作过程为:将自重夹持式电动爬树整枝机放置于树干底部,将上固定块34和下固定块31的螺栓孔对齐通过螺栓固定锁死,此时左上驱动转向装置13、右上驱动转向装置14、左下驱动转向装置18和右下驱动转向装置19均贴紧树干,通过控制驱动电机37,使左上夹紧臂11、右上夹紧臂12、左下夹紧臂16和右下夹紧臂17均夹紧树干,当整枝机处于水平时,停止驱动电机37工作,控制减速电机50运转使整枝机开始沿树干上升,当上升到一定高度时,减速电机50停止运转,控制舵机49运转使轮胎51转向一定角度,控制电动滑轨20向前推进一定距离,启动锯片电机23使锯片24高速转动,然后控制减速电机50继续运转,此时整枝机沿树干螺旋上升并剪切掉上升过程树干的侧枝,螺旋上升到一定高度后剪切树枝过程结束,控制锯片电机23关停使锯片24停止转动,控制电动滑轨20回到初始位置,减速电机50反转使整枝机螺旋下降,当下降到一定距离时,舵机49运转使轮胎51转向初始角度,减速电机50运转控制整枝机直线下降回到树干底部,完成对树木的修剪工作。
本发明专利重心在修剪树干外侧,整枝机利用自身重量可以在树上固定而不消耗能量,整机质量较轻,便于携带,可适应10-20厘米直径的人工林,最大剪枝直径为3.5厘米,整个机器工作效率高,对环境的适应能力强,作业过程安全可靠,有极大的利用价值。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 一种自重夹持式电动爬树整枝机
- 一种自重夹持式电动爬树整枝机