一种污泥沉降比监控系统自动清洗装置
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及污泥沉降比监控技术领域,尤其涉及一种污泥沉降比监控系统自动清洗装置。
背景技术
污泥沉降比监控系统是一种监控样品(液体)的污泥沉降比的监控系统,污泥沉降比监控系统是将待检测的样品泵入透明管中,使样品在透明管中沉降,然后通过摄像头对透明管中沉降好的样品进行拍摄,拍摄泥层及液层的液位,以此来判断样品的污泥沉降比。
由于透明管的内壁长期浸泡在富集微生物的样品水中,透明管的内壁极易吸附污泥、微生物、水锈等异物,导致透明管中的沉降污泥无法清晰的反应出来,当摄像头拍照识别污泥沉降比数值时,无法获得真实的污泥沉降数值,导致后续实验结果的存在偏差。由于透明管的内壁吸附的异物极大的影响了照片采集效果,需要及时清理,而目前的清理方式主要是人工清理,费时费力。
因此,现有技术还有待于改进和发展。
发明内容
本发明的目的在于提供一种能对污泥沉降比监控系统中的取样管进行自动清洗的污泥沉降比监控系统自动清洗装置。
为达此目的,本发明采用以下技术方案:
一种污泥沉降比监控系统自动清洗装置,包括:装置箱体、设于所述装置箱体内的取样管和摄像头,以及与所述取样管连接的泵体,所述泵体能选择性的向所述取样管中泵入清水或样品;
还包括:
取样管清洗组件,用于对取样管内壁进行清洗,所述取样管清洗组件包括:
驱动装置,设于所述装置箱体上;
清洗刷头,设于所述驱动装置的输出端,所述驱动装置能驱动所述清洗刷头上下移动,以使所述清洗刷头沿着所述取样管的内壁上下移动,以清洗所述取样管的内壁。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,所述驱动装置为贯穿步进电机,所述贯穿步进电机设于所述装置箱体的顶部,所述贯穿步进电机上设置有沿上下方向贯穿所述贯穿步进电机的电机主体的伸缩电机轴,所述清洗刷头设于所述伸缩电机轴的底端。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,清洗刷头采用海绵清洗刷头。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,清洗刷头包括至少三片夹片、夹设于所述夹片之间的海绵以及用于将所述夹片和所述海绵固定在所述驱动装置的输出端上的螺钉。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,所述海绵为多块,多块所述海绵沿上下方向间隔的设置在所述驱动装置的输出端。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,所述夹片及所述螺钉均采用不锈钢材质。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,所述污泥沉降比监控系统自动清洗装置还包括用于对所述伸缩电机轴进行上行限位的上行限位组件和用于对所述伸缩电机轴进行下行限位的下行限位组件;
所述上行限位组件包括:
上限位接近开关,设于所述装置箱体上且位于所述电机主体与所述清洗刷头之间;
上限位感应块,设于所述伸缩电机轴上且位于所述电机主体与所述清洗刷头之间;
所述下行限位组件包括:
下限位接近开关,设于所述装置箱体上且位于所述电机主体与所述伸缩电机轴的顶端之间;
下限位感应块,设于所述伸缩电机轴上且位于所述电机主体与所述伸缩电机轴的顶端之间。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,所述污泥沉降比监控系统自动清洗装置还包括:
控制模块,所述控制模块与所述摄像头、所述泵体、所述步进电机、所述上限位接近开关、所述下限位接近开关均连接。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,取样管的上下两端分别设置有出口和入口,所述入口与所述泵体连接。
作为上述污泥沉降比监控系统自动清洗装置的可选方案,所述泵体的进水口连接清水管道和样品管道,所述泵体的出水口连接所述取样管。
本发明的污泥沉降比监控系统自动清洗装置通过驱动装置驱动清洗刷头来自动清洗污泥沉降比监控系统中的取样管,无需人工进行清理,省时省力,也不需要将取样管拆卸下来清洗,避免了频繁拆装造成的损坏。
附图说明
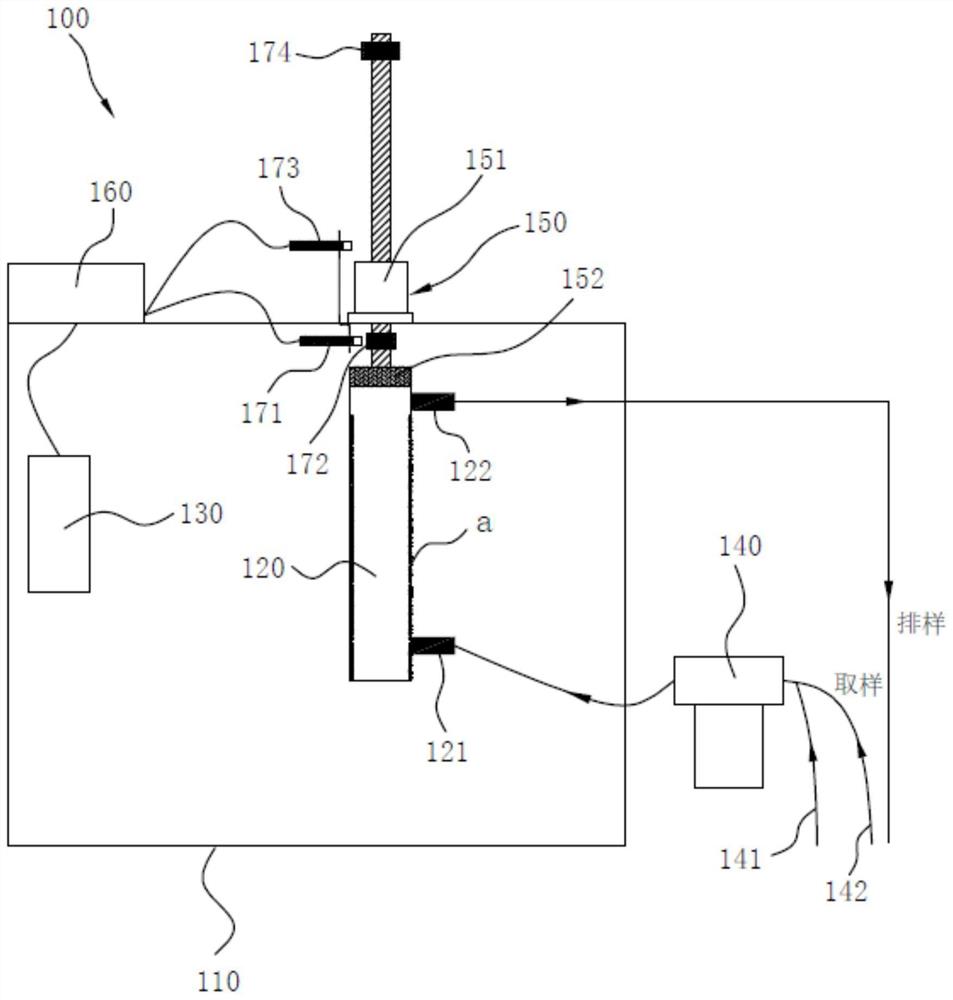
图1是本发明中污泥沉降比监控系统自动清洗装置实施例的立体结构示意图;
图2是本发明中取样管清洗组件的结构示意图。
图中:
100、污泥沉降比监控系统自动清洗装置;110、装置箱体;120、取样管;121、入口;122、出口;130、摄像头;140、泵体;141、清水管道;142、样品管道;150、取样管清洗组件;151、驱动装置;1511、电机主体;1512、伸缩电机轴;152、清洗刷头;1521、夹片;1522、海绵;1523、螺钉;160、控制模块;171、上限位接近开关;172、上限位感应块;173、下限位接近开关;174、下限位感应块。
具体实施方式
下面结合附图和实施例对本发明作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
下面结合附图并通过具体实施方式来进一步说明本发明的技术方案。
本发明提供了一种污泥沉降比监控系统自动清洗装置,图1是本发明中污泥沉降比监控系统自动清洗装置实施例的立体结构示意图,如图1所示,污泥沉降比监控系统自动清洗装置100包括装置箱体110、取样管120、摄像头130、泵体140以及取样管清洗组件150。
取样管120和摄像头130都设置在装置箱体110内,这样使得装置箱体110可以为摄像头130的拍摄提供一个密闭的环境,避免环境光影响拍摄。较佳的,取样管120采用光学透明透明方管或亚克力透明方管,以使摄像头130能清晰的拍摄到取样管120内的泥层和液层。泵体140与取样管120连接,泵体140将样品泵入取样管120,摄像头130对取样管120中的沉降后的样品进行拍摄,从拍摄的图像中泥层和液层的位置即可判断出样品的污泥沉降比数值。
泵体140可以采用蠕动泵,泵体140能选择性的向取样管120中泵入样品,也能向取样管120中泵入清水,当需要检测样品的污泥沉降比时,泵体140能选择性的向取样管120中泵入泥水混合样品,每次污泥沉降测量完成一段时间后即启动清理工作程序。当需要清洗取样管120时,泵体140向取样管120中泵入取样池内上清液清水(泵入时间可修改),以通过清水来冲走取样管120原有的泥水混合液;接着取样管清洗组件150用于对取样管120的内壁进行清洗,如图1所示,取样管清洗组件150包括驱动装置151和清洗刷头152,驱动装置151安装在装置箱体110上,清洗刷头152设置在驱动装置151的输出端,驱动装置151能驱动清洗刷头152上下移动,以使清洗刷头152沿着取样管120的内壁上下移动,刷洗取样管120的内壁,刷洗动作完成后,清洗刷头152停留在取样管120顶部位置。(即清洗前先通过泵体140向取样管120中泵入清水冲走管内泥水混合液,然后驱动装置151驱动清洗刷头152上下移动,对取样管120进行刷洗)。
刷洗完成后,再次往取样管120中的泵入清水,清水可通过溢流从取样管120中流出,同时带出取样管120中的刷洗后留下的污物(通过溢流从取样管120的出口122中流出),具体的,如图1所示,取样管120上设置有入口121和出口122,较佳的,入口121设置在取样管120的底部,出口122设置在取样管120的顶部,入口121与泵体140连接,出口122用于排样及排清水。当取样管120中存在样品时,若需要对取样管120进行清洗,可通过泵体140向取样管120中泵入清水,使得样品从取样管120顶部的出口122流出,具体可通过泵体140的开启时间确保取样管120中完全为清水;若清洗完成后,又可以通过泵体140向取样管120中泵入水池中上清液来使取样管120中的刷洗后的污物完全溢出。
清洗完成后,驱动装置151驱动清洗刷头152回到取样管120的顶部,这样使清洗刷头152不影响摄像头130的拍摄。
如图1所示,泵体140的进水口连接清水管道141和样品管道142,清水管道141和样品管道142上均设置阀门,例如电磁阀,通过控制清水管道141和样品管道142上阀门的开闭以控制泵体140是向取样管120中泵入清水还是样品,泵体140的出水口连接取样管120的入口121。可以理解的是,样品为污水池中的污水,所以样品管道142连接至污水池。清水管道141可以连接清水池或外部供水设备。
驱动装置151可以采用任何能实现直线驱动的装置,图2是本发明中取样管清洗组件的结构示意图,请结合图1及图2,在一种实施方式中,驱动装置151采用贯穿步进电机,贯穿步进电机的电机主体1511设置在装置箱体110的顶部,贯穿步进电机上设置有沿上下方向贯穿电机主体1511的伸缩电机轴1512,清洗刷头152设置在伸缩电机轴1512的底端,伸缩电机轴1512上下伸缩,驱动清洗刷头152上下移动。
在一种实施方式中,清洗刷头152采用海绵清洗刷头。海绵清洗刷头较柔软,不容易刮伤取样管120。较佳的,清洗刷头152的形状尺寸比取样管120的形状尺寸略大3mm左右,以使柔软的清洗刷头152更贴紧在取样管120的内壁,清洗效果较好。
较佳的,如图2所示,清洗刷头152包括至少三片夹片1521、夹设于夹片1521之间的海绵1522以及用于将夹片1521和海绵1522固定在驱动装置151的输出端上的螺钉1523。夹片1521和海绵1522都可以根据需要设定多块,用海绵1522来清洗取样管120可保护取样管120不被刮伤。通过夹片1521夹住海绵1522,便于海绵1522的固定和安装。螺钉1523眼竖直方向从下至上锁在伸缩电机轴1512的底端,通过一颗螺钉1523即可将多片夹片1521和海绵1522锁紧。可以理解的是,夹片1521的尺寸小于海绵1522和取样管120的尺寸,以使海绵1522的边缘充分与取样管120接触,提升清洗效果,另外,也可以避免夹片1521刮到取样管120的内壁。
如图2所示,多块海绵1522沿上下方向间隔的设置在驱动装置151的输出端,将海绵1522与海绵1522之间设置间隔可防止海绵1522堆叠太厚而造成清洗时取样管120形成负压,吸住海绵1522难以拉动。另外,将海绵1522与海绵1522之间设置间隔可以在海绵1522数量一定的情况下增加清洗刷头152的厚度。
较佳的,夹片1521和螺钉1523均采用不锈钢材质,不锈钢材质可防腐防锈,避免夹片1521和螺钉1523长期处于取样管120中容易发生表面生锈腐蚀。
如图1所示,污泥沉降比监控系统自动清洗装置100还包括控制模块160,控制模块160例如可以采用单片机、PLC控制器等,控制模块160与摄像头130、泵体140及贯穿步进电机均连接,控制模块160能控制摄像头130对取样管120进行拍摄,控制泵体140向取样管120泵入清水或样品,控制贯穿步进电机驱动清洗刷头152上下移动,对取样管120进行清洗。
如图2所示,污泥沉降比监控系统自动清洗装置100还包括用于对伸缩电机轴1512进行上行限位的上行限位组件和用于对伸缩电机轴1512进行下行限位的下行限位组件。
请结合图1及图2,上行限位组件包括上限位接近开关171和上限位感应块172。上限位接近开关171设置在装置箱体110上且位于电机主体1511与清洗刷头152之间,上限位接近开关171与控制模块160连接,上限位感应块172设置在伸缩电机轴1512上且位于电机主体1511与清洗刷头152之间,当伸缩电机轴1512向上移动带动上限位感应块172向上移动至上限位接近开关171处时,上限位接近开关171感应到上限位感应块172,上限位接近开关171将感应信号发送到控制模块160,控制模块160控制步进电机的伸缩电机轴1512停止向上移动,实现伸缩电机轴1512的上行限位,保证装置的安全运行。
请结合图1及图2,下行限位组件包括下限位接近开关173和下限位感应块174。下限位接近开关173设置在装置箱体110上且位于电机主体1511与伸缩电机轴1512的顶端之间,下限位接近开关173与控制模块160连接,下限位感应块174设置在伸缩电机轴1512上且位于电机主体1511与伸缩电机轴1512的顶端之间,当伸缩电机轴1512向下移动带动下限位感应块174向下移动至下限位接近开关173处时,下限位接近开关173感应到下限位感应块174,下限位接近开关173将感应信号发送到控制模块160,控制模块160控制贯穿步进电机的伸缩电机轴1512停止向下移动,实现伸缩电机轴1512的下行限位,保证装置的安全运行。
显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,能够进行各种明显的变化、重新调整和替代而不会脱离本发明的保护范围。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
- 一种污泥沉降比监控系统自动清洗装置
- 活性污泥在线监控系统的自动清洗装置